Documentos de Académico
Documentos de Profesional
Documentos de Cultura
T 02 Sistemas
Cargado por
María MarmagoTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
T 02 Sistemas
Cargado por
María MarmagoCopyright:
Formatos disponibles
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
Curso 2o. Ingeniero de Telecomunicacin.
Ampliacin de Matemticas.
Leccin 2.
SISTEMAS DE ECUACIONES DIFERENCIALES.
Curso 2009-10
Teora general de los sistemas lineales
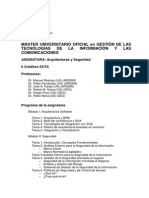
Consideremos el circuito de la figura
L = 1H
~ e = 12sen(100t )V
i1 (t )
C = 0.25 F
R = 4
i2 (t )
R = 6
Aplicando las leyes de Kircho obtenemos que la ecuacin que gobierna la intensidad de
corriente i1 (t) que circula por el circuito de la izquierda es
i01 (t) + 4(i1 (t) i2 (t)) = 12sen (100t)
y que la ecuacin que gobierna la intensidad de corriente i2 (t) que circula por el circuito de la
derecha es
Z t
1
6i2 (t) + 4(i2 (t) i1 (t)) +
i2 ( ) d = 0.
0.25 0
Derivando esta ltima ecuacin y sustituyendo en ella la expresin de i01 (t) dada en la primera,
nos queda un sistema de ecuaciones diferenciales
i01 (t) = 4i1 (t) + 4i2 (t) + 12sen (100t)
i02 (t) = 1.6i1 (t) + 1.2i2 (t) + 4.8sen (100t)
Leccin 2. Sistemas de Ecuaciones Diferenciales
que podemos escribir de forma matricial como
0
i1 (t)
i1 (t)
4
4
12sen (100t)
.
=
+
1.6 1.2
4.8sen (100t)
i02 (t)
i2 (t)
Este es un ejemplo tpico de un sistema lineal de ecuaciones diferenciales de dimensin dos con
coeficientes
constantes.
Sus incgnitas
son i1 (t) e i2 (t). Si consideramos
la funcin
vectorial
12sen (100t)
4
4
i1 (t)
, entonces el
y el vector f (t) =
, la matriz A =
i(t) =
4.8sen (100t)
1.6 1.2
i2 (t)
sistema se escribe abreviadamente como i0 (t) = Ai(t) + f(t).
Veamos otro ejemplo. Si en la ecuacin lineal de segundo orden
y 00 (t) + p(t)y 0 (t) + q(t)y(t) = r(t)
ponemos y1 (t) = y(t) e y2 (t) = y 0 (t), entonces y10 (t) = y2 (t) y resolver la ecuacin es equivalente
a resolver el sistema de ecuaciones diferenciales
y10 (t) = y2 (t)
y20 (t) = q(t)y1 (t) p(t)y2 (t) + r(t)
cuya forma matricial es
y10 (t)
y20 (t)
0
1
q(t) p(t)
y1 (t)
y2 (t)
0
r(t)
Observemos que, en este caso, la matriz de los coeficientes no es constante.
En esta leccin estudiaremos en primer lugar la teora de los sistemas lineales con coeficientes
constantes, completndola con los mtodos para resolver sistemas no homogneos. Despus
estudiaremos una breve introduccin a la teora cualitativa de sistemas no lineales.
Definiciones. Un sistema lineal de orden n con coeficientes constantes es un sistema de ecuaciones diferenciales de la forma
y10 = a11 y1 + a12 y2 + + a1n yn + f1 (t)
y20 = a21 y1 + a22 y2 + + a2n yn + f2 (t)
..
.
yn0 = an1 y1 + an2 y2 + + ann yn + fn (t)
en el que A = [aij ] es una matriz de nmeros reales cuadrada de orden n que se llama matriz de
los coeficientes y fi : [a, b] R (i = 1, 2, . . . , n) son funciones continuas dadas. Se dice que el
sistema es homogneo cuando todas las funciones fi son iguales a la funcin cero.
Una solucin de dicho sistema es una coleccin y1 , y2 , . . . , yn de funciones de clase C 1 ([a, b])
tales que para cada t [a, b] se verifica
y10 (t) = a11 y1 (t) + a12 y2 (t) + + a1n yn (t) + f1 (t)
y20 (t) = a21 y1 (t) + a22 y2 (t) + + a2n yn (t) + f2 (t)
..
.
yn0 (t) = an1 y1 (t) + an2 y2 (t) + + ann yn (t) + fn (t).
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
Si introducimos las funciones vectoriales y, f : [a, b] Rn dadas por
f1 (t)
y1 (t)
f2 (t)
y2 (t)
y
f (t) = .. ,
y(t) = ..
.
.
yn (t)
fn (t)
entonces el sistema se escribe de forma abreviada como y 0 (t) = Ay(t) + f (t), cuya estructura
es la misma que la de una ecuacin lineal de primer orden. De hecho, la teora de los sistemas
lineales es, como cabe esperar, una extensin de las teoras de las ecuaciones lineales de primer
y segundo orden. Esto se pone de manifiesto en los siguientes resultados.
Teorema de existencia y unicidad. Sean A = [aij ] una matriz cuadrada de orden n y
f : [a, b] Rn (i = 1, 2, . . . , n) una funcin vectorial continua. Dados un punto t0 [a, b] y un
vector y0 Rn , entonces el problema de valor inicial
y 0 (t) = Ay(t) + f(t)
con y(t0 ) = y0
tiene solucin nica en [a, b].
Este teorema nos dice, por ejemplo, que la solucin general de un sistema lineal de orden n depender de n constantes que pueden determinarse fijando el valor de cada una de las componentes
de la funcin vectorial y(t) en un punto dado t0 .
Estructura de las soluciones. Sea A = [aij ] una matriz cuadrada de orden n. Sea f :
[a, b] Rn (i = 1, 2, . . . , n) una funcin vectorial continua y consideremos el sistema lineal
y 0 (t) = Ay(t) + f (t). Entonces se verifican:
(1) Las soluciones del sistema homogneo y 0 (t) = Ay(t) asociado forman un espacio vectorial
de dimensin n. En particular, si {y (1) (t), y (2) (t), . . . , y (n) (t)} es una base de soluciones del sistema
homogneo, entonces se dice que la funcin matricial formada columna a columna por estas
soluciones
Y (t) = y (1) (t), y (2) (t), . . . , y (n) (t)
es una matriz fundamental de soluciones del sistema y 0 = Ay. En este caso, la solucin general
del sistema homogneo es y(t) = Y (t)c, donde c Rn es un vector de constantes arbitrarias.
(2) Si y (p) (t) es una solucin particular del sistema completo y 0 (t) = Ay(t) + f(t), entonces la
solucin general del sistema completo es
y(t) = y (p) (t) + Y (t)c = y (p) (t) + c1 y (1) (t) + c2 y (2) (t) + + cn y (n) (t),
siendo Y (t) una matriz fundamental de soluciones del sistema homogneo asociado y c Rn un
vector de constantes arbitrarias.
Sistemas con coeficientes constantes
De acuerdo con lo que acabamos de ver, para resolver un sistema lineal y 0 (t) = Ay(t) + f (t),
debemos hallar una matriz fundamental de soluciones del sistema homogneo asociado y una
Leccin 2. Sistemas de Ecuaciones Diferenciales
solucin particular del sistema completo. Empezaremos recordando cmo se pueden calcular
soluciones de un sistema homogneo y 0 = Ay, tcnicas que debes conocer de la asignatura de
lgebra del curso pasado. Posteriormente veremos mtodos para resolver el sistema completo.
La clave de la resolucin de los sistemas homogneos nos la da el siguiente resultado.
Proposicin 1. (1) Si u es un autovector real de A con autovalor (tambin real), entonces
y(t) = et u es una solucin del sistema y 0 = Ay.
(2) Si u = v +jw es un autovector complejo de A con autovalor complejo = +j, entonces
y (1) (t) = Re(et u) = et [v cos(t) wsen (t)]
y (2) (t) = Im(et u) = et [vsen (t) + w cos(t)]
son soluciones linealmente independientes del sistema y 0 = Ay.
Matriz de los coeficientes diagonalizable. Si la matriz de los coeficientes es diagonalizable,
entonces es que existe una base de Cn formada por autovectores y podemos obtener una base
de soluciones del sistema homogneo usando el resultado anterior con cada pareja autovalorautovector de la base.
Teorema 1. Si la matriz A es diagonalizable, entonces existe una base de soluciones reales del
sistema y 0 = Ay formada de la siguiente manera:
(1) Si es un autovalor real de multiplicidad m y u1 , u2 , . . . , um son autovectores suyos
linealmente independientes, entonces proporciona m soluciones, que son
et u1 , et u2 , . . . , et um .
(2) Si = j es una pareja de autovalores complejos conjugados de multiplicidad m y u1 =
v1 jw1 , u2 = v2 jw2 , . . . , um = vm jwm son autovectores suyos linealmente independientes,
entonces la pareja proporciona 2m soluciones, que son
et [v1 cos(t) w1 sen (t)], et [v2 cos(t) w2 sen (t)], . . . , et [vm cos(t) wm sen (t)],
et [v1 sen (t) + w1 cos(t)], et [v2 sen (t) + w2 cos(t)], . . . , et [vm sen (t) + wm cos(t)].
Matriz de los coeficientes no diagonalizable. Si la matriz de los coeficientes no es diagonalizable, entonces es que tiene autovalores defectivos, o sea, autovalores que no proporcionan tantos
autovectores linealmente independientes como indica su multiplicidad como raz del polinomio
caracterstico; en otras palabras, la multiplicidad algebraica de esos autovalores es estrictamente
mayor que su multiplicidad geomtrica. En este caso, se trabaja con los autovectores generalizados; veamos cmo se hace esto. Supongamos que es un autovalor defectivo cuya multiplicidad
algebraica es m; usando este autovalor, debemos ser capaces de encontrar m soluciones linealmente independientes del sistema homogneo y 0 = Ay. Se sabe del curso pasado que la dimensin
del ncleo de (A I)m coincide con la multiplicidad algebraica m y que los elementos del ncleo
de (A I)m se llaman autovectores generalizados.
Proposicin 2. (1) Si u es un autovector generalizado real de un autovalor real de multiplicidad
m, entonces la funcin vectorial
(A I)2 t2
(A I)m1 tm1
t
y(t) = e I + (A I)t +
+ +
u
2
(m 1)!
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
es una solucin del sistema homogneo y 0 = Ay.
(2) Si u es un autovector generalizado complejo de un autovalor complejo de multiplicidad
m, entonces las partes real e imaginaria de la funcin vectorial
(A I)2 t2
(A I)m1 tm1
t
y(t) = e I + (A I)t +
++
u
2
(m 1)!
son soluciones reales e independientes del sistema homogneo y 0 = Ay.
Ahora, si {u1 , u2 , . . . , um } es una base de autovectores generalizados de un autovalor defectivo,
entonces, en el caso real la Proposicin 2 anterior nos proporciona un mtodo para encontrar m
soluciones linealmente independientes del sistema homogneo y 0 = Ay. Por otro lado, en el caso
complejo, nos proporciona 2m soluciones (las m con las que debe contribuir y las m de su
conjugado).
En la prctica la base de autovectores generalizados se va construyendo paso a paso. Primero
se toman los autovectores linealmente independientes, que formarn una base del ncleo de
A I. Despus se aaden vectores linealmente independientes del ncleo de (A I)2 y as,
sucesivamente, hasta completar la base de m vectores que necesitamos. Este procedimiento tiene
una ventaja a la hora de hacer los clculos. As, si u1 es un autovector, entonces en el clculo de
(A I)2 t2
(A I)m1 tm1
(1)
t
+ +
u1
y (t) = e I + (A I)t +
2
(m 1)!
todos los sumandos se anulan menos el primero; y (1) (t) = et u1 . Si, por ejemplo, u4 lo hemos
aadido tomndolo del ncleo de (A I)2 , entonces en el clculo de
(A I)2 t2
(A I)m1 tm1
(4)
t
+ +
u4
y (t) = e I + (A I)t +
2
(m 1)!
todos los sumandos se anulan menos los dos primeros; y (4) (t) = et [I + (A I)t]u4 , aunque m
sea mayor que 2.
El mtodo de variacin de los parmetros. El mtodo de variacin de los parmetros
que hemos visto para ecuaciones lineales de primer y segundo orden se traslada a los sistemas
y 0 (t) = Ay(t) + f (t) sin mucha dificultad. Supongamos que Y (t) es una matriz fundamental de
soluciones del sistema homogneo y 0 = Ay. Entonces la solucin general del sistema homogneo
es y(t) = Y (t)c, donde c Rn es un vector cualquiera de escalares. La idea es buscar una solucin
particular del sistema completo de la forma y (p) (t) = Y (t)v(t), donde v(t) es una funcin vectorial
que debemos determinar. Puesto que
(y (p) )0 (t) = Y 0 (t)v(t) + Y (t)v 0 (t),
sustituyendo en la ecuacin completa nos queda
Y 0 (t)v(t) + Y (t)v0 (t) = AY (t)v(t) + f (t).
Ahora bien, como Y 0 (t) = AY (t), entonces queda Y (t)v0 (t) = f (t) y, por tanto,
v 0 (t) = [Y (t)]1 f(t)
Leccin 2. Sistemas de Ecuaciones Diferenciales
con lo que
v(t) =
En resumen, la funcin vectorial
[Y (t)]1 f (t) dt.
(p)
y (t) = Y (t)
[Y (t)]1 f (t) dt
es una solucin particular de la ecuacin completa y 0 (t) = Ay(t) + f (t) cuya solucin general es,
entonces,
Z
1
y(t) = Y (t)
[Y (t)] f (t) dt + c
donde c Rn es un vector cualquiera de escalares.
El mtodo de los coeficientes indeterminados. El mtodo de los coeficientes indeterminados
que hemos visto para ecuaciones lineales de primer y segundo orden tambin se traslada a los
sistemas y 0 (t) = Ay(t) + f (t) de forma automtica. Por ejemplo, si las funciones componentes
de f(t) son todas polinomios de orden tres, entonces se busca una solucin particular y (p) (t)
cuyas funciones componentes sean tambin polinomios de orden tres cuyos coeficientes debemos
determinar. Imponiendo que esta y (p) (t) sea una solucin del sistema completo, nos queda un
sistema de ecuaciones lineales escalares cuyas incgnitas son los oceficientes que buscamos.
Ejemplo. Queremos resolver el problema de valor inicial
0
t
1 1
0
.
, y(0) =
y+
y =
7
3t
1
1
Para ello, empezaremos resolviendo el sistema homogneo asociado
1 1
0
y =
y.
1
1
Lo primero es determinar los autovalores y autovectores de la matriz A de los coeficientes. Puesto
que
1 1
2
1 1 = (1 ) 1 = ( 2),
los autovalores son = 0 y = 2. Calcularemos ahora los autovectores. Para = 0
1 1
A I =
1
1
y est claro que los autovectores asociados son u =
lado, para = 2
A I =
1
1
1 1
1 1
y sus mltiplos no nulos. Por otro
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
1
y sus mltiplos no nulos. En
y est claro que los autovectores asociados son v =
1
consecuencia, la solucin general del sistema homogneo asociado es
1
1
(h)
t
t
y (t) = c1 ue + c2 ve = c1
+ c2
e2t .
1
1
Para hallar la solucin
del sistema completo basta con calcular una solucin particu general
t
slo contiene polinomios de primer grado, usamos el mtodo de
lar. Como el trmino
3t
los coeficientes indeterminados y buscamos una solucin de la forma
a + bt
(p)
y (t) =
.
c + dt
Esta funcin debe verificar el sistema de ecuaciones, as que
a + bt c dt + t
t
a + bt
1 1
b
(p) 0
.
=
+
=
(y ) (t) =
a bt + c + dt + 3 t
3t
c + dt
1
1
d
Identificando componente a componente los polinomios de los dos miembros nos queda el sistema
abc
bd
a + c d
b + d
=
=
=
=
0,
1,
3,
1
que es compatible indeterminado. Sumando las ecuaciones primera y tercera nos queda b d =
3 que sumada a la cuarta b + d = 1, nos da b = 1 y d = 2. Con estos valores, la ecuacin
para a y c es a c = 1 y, como slo necesitamos una solucin particular, podemos tomar a = 1
y c = 0. En consecuencia, la solucin particular obtenida es
1+t
(p)
y (t) =
2t
y, por tanto, la solucin general de la ecuacin es
1
1
1+t
(h)
(p)
2t
+ c2
e +
.
y(t) = y (t) + y (t) = c1
1
1
2t
Finalmente, imponemos la condicin inicial
c1 + c2 + 1
0
1
1
1
= y(0) = c1
=
+ c2
+
7
0
1
1
c1 c2
de donde, sumando ambas componentes, obtenemos 7 = 2c1 + 1, con lo cual c1 = 3 y c2 = 4.
La solucin del problema es, entonces,
1
1
1+t
4 + t 4e2t
(h)
(p)
2t
.
y(t) = y (t) + y (t) = 3
4
e +
=
1
1
2t
3 + 2t + 4e2t
Leccin 2. Sistemas de Ecuaciones Diferenciales
Otra forma de proceder es, una vez resuelto el sistema homogneo asociado, aplicar directamente la frmula del mtodo de variacin de los parmetros que nos dice que la solucin general
de un sistema y 0 (t) = Ay(t) + f (t) es
Z
1
y(t) = Y (t)
[Y (t)] f (t) dt + c
donde c es un vector de escalares e Y (t) es una matriz fundamental de soluciones; es decir,
una matriz cuyas columnas forman una base del espacio vectorial de las soluciones del sistema
homogneo asociado. En nuestro caso tenemos
t
1 e2t
.
y
f(t) =
Y (t) =
3t
1 e2t
Entonces, el vector x(t) = [Y (t)]1 f(t) es la solucin del sistema de ecuaciones
t
x1 (t)
1 e2t
=
3t
x2 (t)
1 e2t
que, aplicando la regla de Cramer o bien el mtodo de eliminacin de Gauss, es
3/2
x(t) =
3e2t /2 + te2t
Sustituyendo esto en la frmula e integrando tenemos
1 e2t
3/2
c1
y(t) =
dt +
(t 3/2)e2t
1 e2t
c2
3t/2
1 e2t
c1
=
+
2t
2t
e (1 t)/2
1 e
c2
2t
t + 1/2 + c1 + c2 e
.
=
2t 1/2 + c1 c2 e2t
Finalmente, imponemos las condiciones iniciales
0
1/2 + c1 + c2
= y(0) =
7
1/2 + c1 c2
de donde obtenemos c1 = 7/2 y c2 = 4 y, por tanto, la solucin
4 + t 4e2t
y(t) =
.
3 + 2t + 4e2t
El mtodo de Euler
En esta seccin vamos a estudiar cmo se puede adaptar el mtodo de Euler para obtener soluciones aproximadas de sistemas de ecuaciones diferenciales cualesquiera.
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
Planteamiento del problema y notacin. Queremos resolver el problema de valor inicial
y 0 = f(t, y)
con y(t0 ) = y0
para los valores de t en un intervalo [t0 , tF ] en el que t0 representa el instante inicial de la situacin
descrita por la ecuacin y tF el instante final hasta el que deseamos llegar. Ahora y es una funcin
vectorial y : [t0 , tF ] Rn y f : Rn [t0 , tF ] Rn es un campo vectorial continuo y con derivadas
parciales continuas, con lo cual puede probarse que el problema de valor inicial tiene solucin
nica en el intervalo de trabajo [t0 , tF ].
Como en el caso de las ecuaciones, fijamos n + 1 nodos igualmente espaciados en el intervalo
de trabajo
ti = t0 + ih,
i = 0, 1, . . . , n
donde h = (tF t0 )/n es el tamao de paso. Una vez encontradas estas aproximaciones en los
nodos, interpolaremos para generar aproximaciones en los dems puntos del intervalo de trabajo
[t0 , tF ].
Llamaremos wi a la aproximacin del valor exacto y(ti ) que vamos a ir obteniendo en cada
nodo
y(ti ) wi ,
i = 0, 1, . . . , n;
ahora cada wi es un vector de dimensin n.
El mtodo de Euler. La idea del mtodo sigue siendo truncar el desarrollo de Taylor de y para
quedarnos con su parte lineal. De acuerdo con el teorema de Taylor,
y(ti+1 ) y(ti ) + (ti+1 ti )y 0 (ti ).
Usando que y satisface la ecuacin diferencial y 0 = f(t, y) y escribiendo h en vez de ti+1 ti nos
queda
y(ti+1 ) y(ti ) + hf (ti , y(ti )).
Si disponemos ya de una aproximacin wi y(ti ), la frmula anterior nos proporciona una
aproximacin de y(ti+1 ):
y(ti+1 ) wi+1 := wi + hf(ti , wi ).
Puesto que y(t0 ) = y0 , podemos ir calculando los valores wi de forma iterativa:
w0 = y0 ,
wi+1 = wi + hf(ti , wi ),
i = 0, 1, 2, . . . , n 1.
Interpolacin. Una vez que tenemos las aproximaciones (ti , wi ) para todos los nodos, si queremos hallar una aproximacin del valor y(t) de la solucin en un punto t comprendido entre dos
nodos ti < t < ti+1 , entonces la aproximacin viene dada por
y(t) wi +
wi+1 wi
(t ti ),
h
que no es ms que una interpolacin lineal a trozos hecha coordenada a coordenada.
10
Leccin 2. Sistemas de Ecuaciones Diferenciales
Ejemplo. Si aplicamos el mtodo de Euler para resolver el sistema
y10 (t) = ty1 (t) + (y2 (t))2 ,
y20 (t) = t y1 (t)y2 (t)
1
, obtenemos los siguientes resultados
en el intervalo [0, 1] con valores iniciales y(0) =
1
ti
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0000
y1 (ti )
1.0000
1.1000
1.1920
1.2784
1.3626
1.4484
1.5406
1.6439
1.7637
1.9061
2.0777
y2 (ti )
1.0000
0.9000
0.7910
0.6767
0.5602
0.4439
0.3296
0.2188
0.1128
0.0129
0.0795
Introduccin a la teora cualitativa de los sistemas autnomos
A finales del Siglo XIX aparece la teora cualitativa, o geomtrica, de las ecuaciones diferenciales,
motivada por cuestiones planteadas en el dominio de la mecnica celeste, donde precisamente
los mtodos cuantitativos haban alcanzado sus logros ms espectaculares, por ejemplo en la
prediccin de los eclipses y de las posiciones de los planetas. En esa poca se hizo evidente que las
tcnicas de investigacin cuantitativas clculo de soluciones exactas, resolucin mediante desarrollos en serie y mtodos aproximados no eran capaces de dar respuesta a cuestiones planteadas
en mecnica celeste como la estabilidad del sistema solar o el problema de los tres cuerpos. Para
la resolucin de estos problemas, H. Poincar (1854-1912) introduce en su famosa memoria de
1881 Sur les courbes definies par une quation diffrentielle, el punto de vista cualitativo, ideando
mtodos matemticos completamente nuevos que han sido, y siguen siendo, fuente de continuos
desarrollos de gran importancia en la historia reciente de las matemticas.
Salvo en muy pocos casos, es imposible resolver explcitamente un sistema de ecuaciones
diferenciales ordinarias no lineales, que son los modelos matemticos de muchos fenmenos de
evolucin temporal. En consecuencia, a falta de soluciones explcitas, se plantean otras preguntas,
que hacen referencia a la existencia de conductas constantes o equilibrios, conductas peridicas
y recurrentes, y conductas a largo plazo o comportamientos asintticos, junto con problemas de
estabilidad local y global; estos problemas constituyen el campo de investigacin de la teora
cualitativa de los sistemas dinmicos. Brevemente, el anlisis cualitativo consiste en deducir
propiedades de las soluciones de un sistema de ecuaciones diferenciales sin necesidad de calcularlas
explcitamente.
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
11
Ejemplos. (1) El problema de los tres cuerpos. Supongamos que tres cuerpos de masas m1 ,
m2 y m3 se mueven sometidos a las interacciones gravitatorias entre ellos. Si representamos por
vi (t) = [xi (t), yi (t), zi (t)] (para i = 1, 2, 3) sus posiciones en un instante t, entonces, de acuerdo
con la Ley de Gravitacin de Newton, estos vectores deben verificar el sistema de 9 ecuaciones
diferenciales con 9 incngitas
vi00 (t) = G
X mi mk (vk vi )
k6=i
i = 1, 2, 3.
kvk vi k3
Este sistema no es lineal y no se puede resolver explcitamente. Sin embargo, Poincar prob
que existen soluciones peridicas del mismo. sta es una de las cuestiones de inters en la teora
cualitativa: saber si existen soluciones peridicas de un sistema de ecuaciones diferenciales no
lineal.
(2) El pndulo simple. Si llamamos (t) al ngulo que mide el desplazamiento de un pndulo
simple ideal de longitud desde su posicin de equilibrio, entonces la funcin (t) verifica la
ecuacin diferencial
(t )
00 (t) + g sen ((t)) = 0.
De nuevo, no es posible obtener una solucin explcita mediante una frmula que involucre
las funciones elementales o una serie de potencias. Sin embargo, si las oscilaciones (t) son
pequeas, entonces sen ((t)) (t) y podemos pensar que el movimiento del pndulo debe
parecerse mucho al descrito por la ecuacin diferencial lineal
g
00 (t) + (t) = 0,
cuya solucin general s sabemos calcular:
p
g/ .
p
Esta solucin corresponde a un movimiento oscilatorio de perodo 2 /g y nuestra experiencia
nos dice que, efectivamente, para oscilaciones pendulares pequeas, la solucin oscilante de la
ecuacin aproximada refleja bastante bien el comportamiento real. ste es uno de los problemas
que se plantea la teora cualitativa: saber si al cambiar ligeramente un sistema de ecuaciones
diferenciales para pasar a un sistema que sabemos resolver, por ejemplo lineal, entonces la solucin
del sistema modificado se parece a la solucin del sistema original.
(t) = c1 cos(t) + c2 sen (t),
siendo =
Otra observacin pertinente aqu es la siguiente. El pndulo ideal presenta dos posiciones de
equilibrio; es decir, dos posiciones en las que permanece sin moverse a menos que se le perturbe.
12
Leccin 2. Sistemas de Ecuaciones Diferenciales
Una es cuando est boca abajo, es decir (t) = 0, y otra cuando est boca arriba, es decir
(t) = . Pero hay una diferencia grande entre las dos. Si el pndulo se aparta ligeramente
de su equilibrio (t) = 0 entonces oscila ligeramente alrededor de ste, por lo que (t) = 0 se
llama equilibrio estable. Sin embargo, si se aparta ligeramente de su equilibrio (t) = entonces
cae y no vuelve a pasar por ste, por lo que (t) = se llama equilibrio inestable. Otro de los
problemas centrales de la teora cualitativa es el anlisis de la estabilidad de los equilibrios de un
sistema.
(3) El oscilador de van der Pol es un circuito LC conectado en paralelo con un dispositivo no
lineal que acta como una resistencia variable de manera que la ecuacin que verifica el voltaje
e(t) es
1
Ce00 (t) + (3Ae2 (t) B)e0 (t) + e(t) = 0,
L
donde C es la capacidad, L la inductancia y A y B son dos constantes que dependen del dispositivo. Esta ecuacin no es lineal y no puede resolverse explcitamente. Fue el ingeniero
holands B. van der Pol (18991959) quien construy este circuito en los aos 20 observando
que, independientemente de las condiciones iniciales, el circuito evolucionaba hasta presentar
un movimiento oscilatorio aparentemente peridico. Los mtodos cualitativos permiten probar
que, efectivamente, dicha ecuacin y otras parecidas posee una solucin peridica que es
atractiva, en el sentido de que cualquier otra solucin tiende a largo plazo a coincidir con la
solucin peridica.
(4) El sistema predador-presa de Volterra. Un problema de mucho inters en la ecologa es el
anlisis de las fluctuaciones en las poblaciones de predadores y presas que conviven en un cierto
hbitat. La primera persona que formul un modelo para estudiar un problema de este tipo
fue el matemtico italiano V. Volterra (18601940). Volterra postul que, si x(t) representa la
poblacin de presas e y(t) la de predadores, entonces
x0 (t) = ax(t) bx(t)y(t),
y 0 (t) = cy(t) + dx(t)y(t)
donde a, b, c y d son constantes positivas. Como en el caso anterior, este sistema es no lineal y no
puede resolverse explcitamente. Sin embargo, Volterra prob que las soluciones de este sistema
son peridicas, explicando as las fluctuaciones observadas en la evolucin de las poblaciones.
(5) Si tenemos un circuito LRC sin fuente de voltaje, la carga q(t) presenta conducta oscilatoria
si R2 < 4L/C. Es decir, hay un cambio de conducta cualitativa oscilar o no oscilar cuando
el parmetro = CR2 /L pasa de ser menor que 4 a ser mayor que 4. Esto es lo que se conoce
como una bifurcacin y es otro de los problemas que aborda de la teora cualitativa: el cambio
de conducta de las soluciones (de oscilar a no oscilar, de estable a inestable, de peridica a no
peridica, etc.) en funcin de los valores de los parmetros de los que depende el sistema en
cuestin.
En esta seccin presentamos nicamente las ideas bsicas sobre la estabilidad de sistemas
autnomos, desarrollada primeramente para el caso lineal, es decir, para sistemas de coeficientes
constantes y 0 (t) = Ay(t) y despus para sistemas no lineales.
Empezamos definiendo los principales elementos que aparecen en la teora cualitativa.
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
13
Definiciones. Un sistema autnomo de dimensin n es un sistema de n ecuaciones diferenciales
y 0 (t) = f (y(t))
donde f (y) es un campo vectorial de dimensin n con derivadas parciales continuas en una regin
del espacio Rn . El sistema se llama autnomo, o invariante en el tiempo, porque el campo f(y) no
depende explcitamente de la variable temporal t. Puede probarse que si fijamos una condicin
inicial y(0) = y0 , entonces este sistema tiene solucin nica.
Si lo que tenemos es, por ejemplo, una ecuacin de segundo orden autnoma (como en los
casos del pndulo y del oscilador de van der Pol)
x00 (t) = g(x(t), x0 (t)),
la podemos convertir en un sistema autnomo tomando y1 (t) = x(t) e y2 (t) = x0 (t), con lo que
nos queda el sistema
y10 (t) = y2 (t)
y20 (t) = g(y1 (t), y2 (t)).
Si y0 Rn es un punto tal que f (y0 ) = 0, entonces la solucin del problema de valor inicial
y 0 (t) = f (y(t))
y(0) = y0
es constante: y(t) = y0 para todo t R; o sea, las variables no se mueven del punto inicial. Se
dice entonces que y0 es un punto o solucin de equilibrio del sistema.
Estabilidad. Se dice que la solucin del problema de valor inicial
y 0 (t) = f (y(t))
y(0) = y0
es estable si al tomar un punto cercano a y0 como valor inicial, la solucin correspondiente se
mantiene cerca de la solucin de partida. Si, adems, las soluciones que empiezan cerca no slo
se mantienen cerca, sino que tienden a la solucin dada, entonces se dice que es asintticamente
estable.
Se dice que la solucin es inestable cuando no es estable; es decir, cuando hay soluciones que
empiezan tan cerca como queramos pero que se alejan cuando el tiempo avanza.
Clasificacin de los puntos de equilibrio. Nosotros nos centraremos en la estabilidad de
las soluciones de equilibrio que son puntos aislados; o sea, suficientemente cerca de ellos no hay
ningn otro punto de equilibrio. Para los puntos de equilibrio es fcil cuantificar las definiciones
anteriores. Si y0 es un punto de equilibrio, entonces
(1) El punto y0 es estable si dado p > 0 existe r > 0 tal que si y(t) es una solucin para la
cual ky(0) y0 k r, entonces ky(t) y0 k p para todo t 0.
(2) El punto y0 es asintticamente estable si existe r > 0 tal que si y(t) es una solucin para
la cual ky(0) y0 k r, entonces limt y(t) = y0 .
(3) El punto y0 es inestable si no es estable; en particular, si para cada r > 0 existe una
solucin y(t) tal que ky(0) y0 k r, pero limt y(t) = .
14
Leccin 2. Sistemas de Ecuaciones Diferenciales
En esta introduccin a la teora cualitativa, estudiaremos cmo clasificar los puntos de equilibrio de un sistema autnomo en estables, asintticamente estables o inestables; primero para
sistemas lineales y luego para sistemas no lineales. La existencia de soluciones peridicas y
el anlisis de las bifurcaciones se escapan de los objetivos de este curso y se abordarn en la
asignatura optativa de quinto curso.
Como hemos dicho, empezaremos estudiando de manera detallada la estabilidad del origen
de coordenadas como punto de equilibrio de un sistema lineal con coeficientes constantes. La
razn es que, segn veremos, el procedimiento de linealizacin de un sistema no lineal permite,
en muchos casos, reducir el estudio de la estabilidad de los puntos de equilibrio de un sistema no
lineal al de la estabilidad del origen en el caso lineal.
Estabilidad de los sistemas lineales autnomos. Es obvio que el origen de coordenadas
es siempre un punto de equilibrio de un sistema lineal autnomo y 0 (t) = Ay(t). Si, adems, el
determinante de la matriz de los coeficientes es distinto de cero, entonces el origen es el nico
punto de equilibrio del sistema. Si dicho determinante es igual a cero, entonces aparece un
subespacio, el ncleo de A, de puntos de equilibrio; este caso no es de inters en las aplicaciones,
as que no lo estudiaremos. Supondremos, entonces, que la matriz de los coeficientes A es no
singular o, equivalentemente, que sus autovalores son distintos de cero. Pues bien, la estabilidad
depende del signo de la parte real de los autovalores, pudindose distinguir los siguientes casos.
1. Si todos los autovalores tienen parte real estrictamente negativa, entonces el origen es un
punto de equilibrio asintticamente estable.
2. Si todos los autovalores tienen parte real negativa o cero y los que tienen parte real cero son
no defectivos, entonces el origen es un punto de equilibrio estable pero no asintticamente
estable.
3. Si algn autovalor tiene parte real estrictamente positiva o algn autovalor defectivo tiene
parte real cero, entonces el origen es un punto de equilibrio inestable.
Estabilidad de los puntos de equilibrio de sistemas no lineales autnomos. Sea ahora
y0 un punto de equilibrio de un sistema no lineal y 0 (t) = f(y(t)). Si aplicamos el Teorema de
Taylor, obtenemos que para y y0 se verifica
f (y) Df(y0 )(y y0 )
donde Df (y0 ) es la matriz jacobiana del campo f en el punto y0 , es decir, la matriz de las
derivadas parciales de las componentes de f evaluadas en el punto y0 . Cabe pensar, entonces,
que el comportamiento del sistema no lineal cerca del punto de equilibrio sea parecido al del
sistema lineal y 0 (t) = Df(y0 )(y(t) y0 ). Si hacemos una traslacin en las variables dependientes,
x(t) = y(t) y0 , entonces este sistema queda x0 (t) = Df(y0 )x(t). Este procedimiento de sustituir
el sistema no lineal por su parte lineal cerca de un punto de equilibrio se llama linealizacin y
funciona muy bien en muchos casos como pone de manifiesto el siguiente teorema (en el que se
usa la notacin recin introducida).
Teorema de Linealizacin de Liapunov y Poincar. (1) El punto y0 es un punto de
equilibrio asintticamente estable de un sistema no lineal autnomo plano si todos los autovalores
de la matriz de jacobiana Df(y0 ) tienen parte real estrictamente negativa.
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
15
(2) El punto y0 es un punto de equilibrio inestable de un sistema no lineal autnomo plano si
algn autovalor de la matriz jacobiana Df(y0 ) tiene parte real estrictamente positiva.
Sin embargo, el procedimiento de linealizacin no funciona si hay autovalores con parte real
cero y los dems tienen parte real negativa.
Ejercicios
Ejercicio 1 Resuelve el siguiente problema de valor inicial
0
1
4 1
0
.
y+
,
y(0) =
y =
t
2e
0
2 1
Ejercicio 2 Resuelve el siguiente problema de valor inicial
15
4
2
1
0
2t
te ,
y =
y
.
y(0) =
4
3 1
1
Ejercicio 3 Resuelve el siguiente problema de valor inicial
4e cos(t)
4
5
0
y+
y =
,
2 2
0
y(0) =
0
0
Ejercicio 4 Resuelve el siguiente problema de valor inicial
2
1 1
2
0
t
y =
e,
y+
.
y(0) =
2
4
3
2
Ejercicio 5 Resuelve el siguiente problema de valor inicial
3
1
2
1
0
2t
y =
y+
e ,
y(0) =
.
1 1
2
0
Ejercicio 6 Resuelve el siguiente problema de valor inicial
1 1
0
t
6
y 0 = 0 1 1 y + 2t ,
y(0) = 2 .
0
0 1
t
1
Ejercicio 7 Resuelve el siguiente problema de valor inicial
2 0 1
1
1
0
2t
y(0) = 1 .
y = 0 2 0 y + 0 e ,
0 1 3
1
1
16
Leccin 2. Sistemas de Ecuaciones Diferenciales
Ejercicio 8 Resuelve el siguiente problema de valor inicial
t
0 1 1
1
e
y0 = 1 0 1 y + 0 ,
y(0) = 1 .
0
1 1 0
0
Ejercicio 9 Resuelve el siguiente problema de valor inicial
1
1 1
1
1
0
3 y+ t ,
y = 3 3
y(0) = 0 .
2 2
2
0
1
Ejercicio 10 Resuelve el siguiente problema de valor inicial
t
2
3
3
0
e
0
0
0 3
1 y+
,
y(0) = 0 .
y =
0
0
1 3
1
Ejercicio 11 Aproxima la solucin del problema de valor inicial
x0 = y(1 + x + y 2 ),
y 0 = xy(1 + x2 + 2y 2 ),
x(0) = 1,
y(0) = 2
en el intervalo [0, 1] usando el mtodo de Euler con h = 0.2.
Ejercicio 12 Aproxima la solucin del problema de valor inicial
x0 = y(1 x 2y 2 ),
y 0 = x(1 x + y),
x(0) = 1,
y(0) = 0
en el intervalo [0, 1] usando el mtodo de Euler con h = 0.1.
Ejercicio 13 Aproxima la solucin del problema de valor inicial
y 00 + ty 0 t2 y = 1 + t,
y(0) = 1,
y 0 (0) = 2
en el intervalo [0, 1]. Para ello, transforma la ecuacin en un sistema y usa el mtodo de Euler
con h = 0.1.
Ejercicio 14 Aproxima la solucin del problema de valor inicial correspondiente al movimiento
de un pndulo de longitud unidad
y 00 + 10sen (y) = 0
con y(0) = /6,
y 0 (0) = 0
en el intervalo [0, 1]. Para ello, transforma la ecuacin en un sistema y usa el mtodo de Euler
con h = 0.1. Compara los resultados con lo que se obtiene linealizando la ecuacin.
Ejercicio 15 Aproxima la solucin del problema de valor inicial
y 00 + t2 y 0 3ty =
1
1 + t2
con y(0) = 1,
y 0 (0) = 0
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
17
en el intervalo [0, 1]. Para ello, transforma la ecuacin en un sistema y usa el mtodo de Euler
con h = 0.1.
Ejercicio 16 Determina la estabilidad del origen como punto de equilibrio de los siguientes
sistemas:
x0 = y
y 0 = 8x 6y
x0 = 4x 2y
(4) 0
y = 5x + 2y
(1)
x0 = 4x y
y 0 = 2x + 5y
x0 = 2y
(5) 0
y = 2x y
x0 = x 4y
y 0 = 8x + 4y
x0 = 5x + y
(6) 0
y = x 5y.
(2)
(3)
Ejercicio 17 Determina la estabilidad de los puntos de equilibrio de los siguientes sistemas:
1. x0 = (2 x 2y)x,
2. x0 = y 2 3x + 2,
3. x0 = 4 4x2 y 2 ,
4. x0 = (1 + x)(1 y),
y 0 = (2 2x y)y,
y 0 = x2 y 2 ,
y 0 = 3xy,
y 0 = x(y 2 4).
Ejercicios y cuestiones de exmenes de cursos anteriores.
Ejercicio 18 Resuelve el problema de valor inicial
0
2 2
0
.
y,
y(0) =
y =
3
2 3
Ejercicio 19 Resuelve el problema de valor inicial
0 1
1
0
y =
y,
y(0) =
.
1
2
2
Ejercicio 20 Resuelve el problema de valor inicial
2 1
0
y,
y =
2
1
y(0) =
Ejercicio 21 Resuelve el siguiente problema de valor inicial
0
0 1
0
y =
,
y+
3sen (t) cos(t)
2 3
Ejercicio 22 Resuelve el problema de valor inicial
1 1
t
0
y =
y+
,
1
1
3t
1
0
y(0) =
y(0) =
0
7
2
4
18
Leccin 2. Sistemas de Ecuaciones Diferenciales
Ejercicio 23 Resuelve el problema de valor inicial
t
2 1
2e
0
y =
y+
,
0 2
0
y(0) =
Ejercicio 24 Resuelve el problema de valor inicial
2 1
(1 t)et
0
,
y+
y =
1 2
tet
y(0) =
Ejercicio 25 Resuelve el problema de valor inicial
3
0 1
3et
y 0 = 2 1 3 y + 5et ,
3et
1
0 5
Ejercicio 26 Considera la ecuacin diferencial
1
2
3
1
2
y(0) = 2 .
2
y 00 + ty 0 + ty = 1 t.
Transfrmala en un sistema de ecuaciones diferenciales y da dos pasos del mtodo de Euler para
resolver el problema de valor inicial correspondiente a y(0) = 1 e y 0 (0) = 1 con tamao de paso
h = 0.2.
Ejercicio 27 Considera el sistema de ecuaciones diferenciales
x0 = xy + x + y 3,
y 0 = x + y.
(1) Da dos pasos del mtodo de Euler para resolver el problema de valor inicial correspondiente
a x(0) = 1 e y(0) = 4 con tamao de paso h = 0.1.
(2) Determina y clasifica sus puntos de equilibrio.
Ejercicio 28 Determina y, si es posible, clasifica los puntos de equilibrio del sistema
x0 = x y 2 ,
y 0 = x y 2.
Si no es posbile clasificar alguno, indica por qu.
Ejercicio 29 (1) Enuncia el teorema de linealizacin de Liapunov y Poincar.
(2) Determina y clasifica los puntos de equilibrio del sistema no lineal
x0 = x2 y 2 ,
y 0 = (x 1)(y + 3x + 4).
Ejercicio 30 (1) Enuncia el teorema de linealizacin de Liapunov y Poincar.
(2) Determina y clasifica los puntos de equilibrio del sistema no lineal
x0 = (x 1)(y + 1),
y 0 = x2 y + 4x + 2y + 2.
Ampliacin de Matemticas (Ingeniera de Telecomunicacin) Curso 2009/10
19
Bibliografa
Para desarrollar esta leccin pueden consultarse los siguientes textos, en especial el de Braun. El
de James incluye varias aplicaciones a la ingeniera. El de Simmons tiene muchos ejemplos pero
el tratamiento terico no se ajusta al nuestro porque no se basa en las tcnicas y los resultados
del lgebra lineal.
[517,9/2-BRA] M. Braun, Ecuaciones diferenciales y sus aplicaciones, Captulos 3 y 4.
[51:62/ADV] G. James, Advanced Modern Engineering Mathematics, Captulo 6.
[517.9/2-SIM] G.F. Simmons, Ecuaciones diferenciales, Captulos 10 y 11.
También podría gustarte
- Expended or ADocumento7 páginasExpended or AMaría MarmagoAún no hay calificaciones
- Tema VHDLDocumento23 páginasTema VHDLMaría MarmagoAún no hay calificaciones
- Datos y CifrasDocumento176 páginasDatos y CifrasMaría MarmagoAún no hay calificaciones
- Conv AdDocumento8 páginasConv AdMaría MarmagoAún no hay calificaciones
- Generalidades Pic ImprDocumento14 páginasGeneralidades Pic ImprMaría MarmagoAún no hay calificaciones
- LCD LM016Documento7 páginasLCD LM016María MarmagoAún no hay calificaciones
- FiltroDocumento5 páginasFiltroMaría MarmagoAún no hay calificaciones
- DisplaysDocumento6 páginasDisplaysMaría MarmagoAún no hay calificaciones
- Datos y CifrasDocumento176 páginasDatos y CifrasMaría MarmagoAún no hay calificaciones
- Programa Asignatura GovTICDocumento1 páginaPrograma Asignatura GovTICMaría MarmagoAún no hay calificaciones
- Tema 1Documento23 páginasTema 1María MarmagoAún no hay calificaciones
- Ejercicios C1-2Documento5 páginasEjercicios C1-2María MarmagoAún no hay calificaciones
- CursocDocumento18 páginasCursocMaría MarmagoAún no hay calificaciones
- 2007 SeptiembreDocumento4 páginas2007 SeptiembreMaría MarmagoAún no hay calificaciones
- 2006 SeptiembreDocumento2 páginas2006 SeptiembreMaría MarmagoAún no hay calificaciones
- 2005 SeptiembreDocumento4 páginas2005 SeptiembreMaría MarmagoAún no hay calificaciones
- Boletín Tema 10 Parte 2Documento3 páginasBoletín Tema 10 Parte 2María MarmagoAún no hay calificaciones
- BodeDocumento3 páginasBodeMaría MarmagoAún no hay calificaciones
- Programa Asignatura GovTICDocumento1 páginaPrograma Asignatura GovTICMaría MarmagoAún no hay calificaciones
- Exámenes 2009-2010Documento35 páginasExámenes 2009-2010María MarmagoAún no hay calificaciones
- Ejercicios C1-2Documento5 páginasEjercicios C1-2María MarmagoAún no hay calificaciones
- Tema TrazadoBodeDocumento31 páginasTema TrazadoBodeCora LailopAún no hay calificaciones
- Programa Asignatura IyPDocumento2 páginasPrograma Asignatura IyPMaría MarmagoAún no hay calificaciones
- Programa Asignatura ARQSEGDocumento2 páginasPrograma Asignatura ARQSEGMaría MarmagoAún no hay calificaciones
- Programa de PODocumento1 páginaPrograma de POMaría MarmagoAún no hay calificaciones
- DiagramadeflujoDocumento2 páginasDiagramadeflujoMaría MarmagoAún no hay calificaciones
- T6 3Documento20 páginasT6 3Mauro JimenezAún no hay calificaciones
- Programa Asignatura HDPTICDocumento2 páginasPrograma Asignatura HDPTICMaría MarmagoAún no hay calificaciones
- MET Mmi-Apuntes PDFDocumento62 páginasMET Mmi-Apuntes PDFPatri LuscofuscoAún no hay calificaciones
- Ad de Lyapunov para Sistemas LinealesDocumento23 páginasAd de Lyapunov para Sistemas LinealesManuel NavarreteAún no hay calificaciones
- Estabilidad de SistemasDocumento17 páginasEstabilidad de SistemasRaquel1896Aún no hay calificaciones
- Medi2 U2 A2 JeruDocumento9 páginasMedi2 U2 A2 JeruJesús ÚrzuloAún no hay calificaciones
- Estabilidad Transitoria - Criterio Areas IgualesDocumento49 páginasEstabilidad Transitoria - Criterio Areas IgualesCésar Andrés Barrios ArroyoAún no hay calificaciones
- Tarea 6Documento2 páginasTarea 6Loghan Chavez MAún no hay calificaciones
- LyapunovDocumento11 páginasLyapunovManuel BautistaAún no hay calificaciones
- EE354 - Clase 1P2 - Sistemas Dinámicos 2017-IIDocumento24 páginasEE354 - Clase 1P2 - Sistemas Dinámicos 2017-IIJoshua RojasAún no hay calificaciones
- Estabilidad Sistemas No LinealesDocumento12 páginasEstabilidad Sistemas No LinealesjulianAún no hay calificaciones
- Criterios de Estabilidad y Bifurcación en RNDocumento21 páginasCriterios de Estabilidad y Bifurcación en RNHector TrianaAún no hay calificaciones
- Teoria Moderna de Control LinealDocumento92 páginasTeoria Moderna de Control LinealEddie MarinAún no hay calificaciones
- Sistemas Autonomos 2Documento141 páginasSistemas Autonomos 2Susej MI RotnederAún no hay calificaciones
- Algunas Ecuaciones EcológicasDocumento34 páginasAlgunas Ecuaciones EcológicasRulo May TzucAún no hay calificaciones
- Guión 2Documento27 páginasGuión 2LuisRcAún no hay calificaciones
- Análisis de Las Ecuaciones de Lotka - Volterra y Algunas de Sus VariantesDocumento107 páginasAnálisis de Las Ecuaciones de Lotka - Volterra y Algunas de Sus VariantesAbraham Zamudio ChaucaAún no hay calificaciones
- 3.matemáticas para Economistas 3Documento95 páginas3.matemáticas para Economistas 3Edgar Junior AnticonaAún no hay calificaciones
- Estabilidad PDFDocumento24 páginasEstabilidad PDFMILTON CABRERAAún no hay calificaciones
- Depredador y PresaDocumento126 páginasDepredador y PresaanomiatotalAún no hay calificaciones
- Sistemas de Control Avanzado - 1ra EDDocumento87 páginasSistemas de Control Avanzado - 1ra EDE Roy Zapata Z100% (1)
- Sistema Péndulo CarretillaDocumento17 páginasSistema Péndulo CarretillaJosé MartínezAún no hay calificaciones
- Sobre El Efecto de La Dinámica Laboral, La Tecnología y El Sector Informal en El Crecimiento EconómicoDocumento151 páginasSobre El Efecto de La Dinámica Laboral, La Tecnología y El Sector Informal en El Crecimiento EconómicoSmith CapiaAún no hay calificaciones
- Separatas Ingenieria de Control 4Documento32 páginasSeparatas Ingenieria de Control 4rullitoAún no hay calificaciones
- Estabilidad de Lyapunov - JearDocumento6 páginasEstabilidad de Lyapunov - JearRolando Miguel Rojas DoloresAún no hay calificaciones
- ProyectoDocumento18 páginasProyectoEdwar Cordova QuiquiaAún no hay calificaciones
- Estabilidad de LyapunovDocumento32 páginasEstabilidad de LyapunovRaul Negron GodoyAún no hay calificaciones
- LyapunovDocumento40 páginasLyapunovGustavo MesiasAún no hay calificaciones
- Estabilidad de LiapunovDocumento3 páginasEstabilidad de LiapunovLuis VerenzuelaAún no hay calificaciones
- Hopfield Bam ExpoDocumento55 páginasHopfield Bam ExpoMariia JoseAún no hay calificaciones
- Ecuaciones AutónomasDocumento2 páginasEcuaciones AutónomasEduardo FernándezAún no hay calificaciones
- Modelo Depredador Presa de Lotka VolterraDocumento21 páginasModelo Depredador Presa de Lotka VolterraRicardo PabónAún no hay calificaciones