También podría gustarte
- Propuesta de Solución - PIC-NETBEANSDocumento4 páginasPropuesta de Solución - PIC-NETBEANSAlexisVizueteAún no hay calificaciones
- Diseño IgnitionDocumento135 páginasDiseño IgnitionAlexisVizueteAún no hay calificaciones
- Norma Isa95 - Isasp101Documento6 páginasNorma Isa95 - Isasp101AlexisVizueteAún no hay calificaciones
- Normas Isa S101Documento48 páginasNormas Isa S101AlexisVizuete100% (8)
- PIDDocumento40 páginasPIDAlexisVizueteAún no hay calificaciones
- Relaciones Socio-CulturalesDocumento16 páginasRelaciones Socio-CulturalesAlexisVizueteAún no hay calificaciones
- Norma Isa S5.4Documento5 páginasNorma Isa S5.4AlexisVizueteAún no hay calificaciones
- 2 Ejemplos de Matrices Lógicas para TesisDocumento2 páginas2 Ejemplos de Matrices Lógicas para TesisLimpiezaKaizenAún no hay calificaciones
- Actividad 2 Matriz Grupo 5Documento30 páginasActividad 2 Matriz Grupo 5paola alexandra meza pabonAún no hay calificaciones
- SYO Sistemas y Organizaciones - Guía 2021Documento225 páginasSYO Sistemas y Organizaciones - Guía 2021Nicolas SantagadaAún no hay calificaciones
- Enun y Sol Ext 2019-20Documento13 páginasEnun y Sol Ext 2019-20Alvaro MartiAún no hay calificaciones
- GD-F-007 Formato Acta y Registro de Asistencia V02Documento7 páginasGD-F-007 Formato Acta y Registro de Asistencia V02Cuadreno Mimosin MimosinAún no hay calificaciones
- Procesos OperativosDocumento14 páginasProcesos OperativosRicardo AguiileraAún no hay calificaciones
- Preguntas Nfo y NfotDocumento8 páginasPreguntas Nfo y Nfotroger ricardoAún no hay calificaciones
- Relacion de Pert y CPM Con La Programacion LinealDocumento2 páginasRelacion de Pert y CPM Con La Programacion LinealCesar Mariany100% (1)
- Actividad 1. Mapa MentalDocumento3 páginasActividad 1. Mapa MentalSamuel ValenzuelaAún no hay calificaciones
- Termodinamicaentalpiahess 110921173255 Phpapp02Documento92 páginasTermodinamicaentalpiahess 110921173255 Phpapp02Darius RixAún no hay calificaciones
- Manejo de Conflictos OrientacionesDocumento26 páginasManejo de Conflictos OrientacionesSamuel Cruz MedinaAún no hay calificaciones
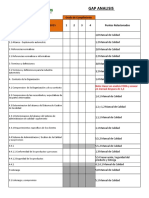
- Analisis GAP Puntos IATFDocumento12 páginasAnalisis GAP Puntos IATFJuan C GramilloAún no hay calificaciones
- Guia Examen Final de FisicoquimicaDocumento3 páginasGuia Examen Final de FisicoquimicaBaarbiie CLemeennteAún no hay calificaciones
- Caja NegraDocumento5 páginasCaja NegraJesus CHAún no hay calificaciones
- 1.1 y 1.2 Ing Sistemas 2Documento7 páginas1.1 y 1.2 Ing Sistemas 2Valeria Itzel Potenciano ZubietaAún no hay calificaciones
- Brochure Instrumentacion RedesindustrialesDocumento7 páginasBrochure Instrumentacion RedesindustrialesEddy Santiago Neira SisaAún no hay calificaciones
- Sistema de Prevención, Convivencia y Seguridad Ciudadana PDFDocumento60 páginasSistema de Prevención, Convivencia y Seguridad Ciudadana PDFHernan Andres Sanchez Ramirez100% (1)
- Termodinamica y Transferencia de CalorDocumento18 páginasTermodinamica y Transferencia de CalorBryn LbRtAún no hay calificaciones
- Brazo RobóticoDocumento2 páginasBrazo RobóticovilvazAún no hay calificaciones
- Capitulo 8Documento4 páginasCapitulo 8kokolithaAún no hay calificaciones
- Una Empresa Como Sistema Abierto ViableDocumento10 páginasUna Empresa Como Sistema Abierto ViableRodrigo Alex Carrillo CarrilloAún no hay calificaciones
- 09 MEF-2022 23-LaminasDocumento53 páginas09 MEF-2022 23-LaminasMoumenine HoussamAún no hay calificaciones
- Temario Integradora II AlumnosDocumento7 páginasTemario Integradora II AlumnosExayana Lujan GarcíaAún no hay calificaciones
- Memoria Abdulrahim OukarDocumento90 páginasMemoria Abdulrahim OukarRodrigo chavez mendozaAún no hay calificaciones
- Programacion Controladores Logicos Capitulo 7Documento21 páginasProgramacion Controladores Logicos Capitulo 7Juan RobertoAún no hay calificaciones
- Unidad 3-Fase 4 - Grupo - 301124 - 766Documento11 páginasUnidad 3-Fase 4 - Grupo - 301124 - 766Ingeniero DavidAún no hay calificaciones
- Teoria de SistemasDocumento12 páginasTeoria de SistemasAlan Ricardo Medina MontielAún no hay calificaciones
- SB T12 CalorimetríaDocumento19 páginasSB T12 CalorimetríabuenosdiazAún no hay calificaciones
- Unidad 2 - TadDocumento26 páginasUnidad 2 - Tadarmando7321Aún no hay calificaciones