También podría gustarte
- Entendiendo Prueba de Resistencia de Aislamiento PDFDocumento6 páginasEntendiendo Prueba de Resistencia de Aislamiento PDFbofo_100_aleAún no hay calificaciones
- Entendiendo Prueba de Resistencia de Aislamiento PDFDocumento6 páginasEntendiendo Prueba de Resistencia de Aislamiento PDFbofo_100_aleAún no hay calificaciones
- Operadores Matemáticos - ExcelDocumento3 páginasOperadores Matemáticos - ExcelgalvaoneAún no hay calificaciones
- Texto 3Documento30 páginasTexto 3Juan Guerrero BustamanteAún no hay calificaciones
- Cartilla Educ - Proceso ElectoralDocumento18 páginasCartilla Educ - Proceso ElectoralSakay Bles Escalante BlanquilloAún no hay calificaciones
- From The Inside (Spanish) - CDocumento1 páginaFrom The Inside (Spanish) - CLuthekLudelAlfaroAún no hay calificaciones
- Delitos Sexuales Dogmatica...Documento8 páginasDelitos Sexuales Dogmatica...LuthekLudelAlfaroAún no hay calificaciones
- Juicio OralDocumento2 páginasJuicio OralLuthekLudelAlfaroAún no hay calificaciones
- Juicio OralDocumento2 páginasJuicio OralLuthekLudelAlfaroAún no hay calificaciones
- Delitos Sexuales Dogmatica...Documento8 páginasDelitos Sexuales Dogmatica...LuthekLudelAlfaroAún no hay calificaciones
- Diagramas de RsDocumento2 páginasDiagramas de RsLuthekLudelAlfaroAún no hay calificaciones
- ContrlDocumento2 páginasContrlLuthekLudelAlfaroAún no hay calificaciones
- SolicitudDocumento1 páginaSolicitudLuthekLudelAlfaroAún no hay calificaciones
- Memoria Anual 2017 PDFDocumento159 páginasMemoria Anual 2017 PDFDanilo Andre Giglio100% (1)
- Horario 2017Documento1 páginaHorario 2017LuthekLudelAlfaroAún no hay calificaciones
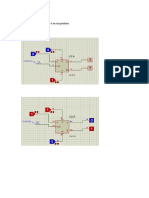
- Simulación de in FF Tipo RDocumento2 páginasSimulación de in FF Tipo RLuthekLudelAlfaroAún no hay calificaciones
- RUEDASDocumento3 páginasRUEDASLuthekLudelAlfaroAún no hay calificaciones
- Diagrama de Flujo Del Sistema EléctricoDocumento5 páginasDiagrama de Flujo Del Sistema EléctricoLuthekLudelAlfaroAún no hay calificaciones
- Iluminc IONDocumento23 páginasIluminc IONLuthekLudelAlfaroAún no hay calificaciones
- 107 - FDG La Historia de Daniel - 0Documento2 páginas107 - FDG La Historia de Daniel - 0Maritza Ventura SalirrosasAún no hay calificaciones
- Sectores Típicos de DistribuciónDocumento6 páginasSectores Típicos de DistribuciónLuthekLudelAlfaroAún no hay calificaciones
- Datos de Placa Del ProyectoDocumento3 páginasDatos de Placa Del ProyectoLuthekLudelAlfaroAún no hay calificaciones
- TareailuminacionDocumento5 páginasTareailuminacionLuthekLudelAlfaroAún no hay calificaciones
- 1Documento1 página1LuthekLudelAlfaroAún no hay calificaciones
- Qué Es El Impuesto A La RentaDocumento2 páginasQué Es El Impuesto A La RentaLuthekLudelAlfaroAún no hay calificaciones
- Simulación de in FF Tipo RDocumento2 páginasSimulación de in FF Tipo RLuthekLudelAlfaroAún no hay calificaciones
- Diagramas de RsDocumento2 páginasDiagramas de RsLuthekLudelAlfaroAún no hay calificaciones
- Coelce - Normas - Corporativas Diseno Sismico SubestacionesDocumento13 páginasCoelce - Normas - Corporativas Diseno Sismico SubestacionesacuaroscarAún no hay calificaciones
- Es NavidadDocumento1 páginaEs NavidadLuthekLudelAlfaroAún no hay calificaciones
- Red Eléctrica No LinealDocumento3 páginasRed Eléctrica No LinealLuthekLudelAlfaro0% (1)
- S9-Metalografia Por ReplicaDocumento56 páginasS9-Metalografia Por ReplicaJose JoseAún no hay calificaciones
- Catálogo Hogares de HergomDocumento12 páginasCatálogo Hogares de HergomEmilioAún no hay calificaciones
- Laboratorio 4Documento4 páginasLaboratorio 4Kevin IzaguirreAún no hay calificaciones
- Universidad Popular Autónoma de Veracruz: Examen Final Quimica 1Documento2 páginasUniversidad Popular Autónoma de Veracruz: Examen Final Quimica 1José TapiaAún no hay calificaciones
- 2020 1105actividad3 PDFDocumento5 páginas2020 1105actividad3 PDFmargarita giraldoAún no hay calificaciones
- Libro Mecánica de Suelos Ii - Rodolfo C. Medrano CastilloDocumento171 páginasLibro Mecánica de Suelos Ii - Rodolfo C. Medrano CastilloHéctor Santa María94% (33)
- Clase 8 Derivada en ParametricasDocumento3 páginasClase 8 Derivada en ParametricasLuz Aída Castiblanco ForeroAún no hay calificaciones
- Factor de carga y diagramas de carga eléctricaDocumento7 páginasFactor de carga y diagramas de carga eléctricaJean CarlosAún no hay calificaciones
- Informe de QuimicaDocumento7 páginasInforme de QuimicaOscar David Camacho CristanchoAún no hay calificaciones
- Especificaciones de Cal Viva para Propositos Estructurales 5Documento5 páginasEspecificaciones de Cal Viva para Propositos Estructurales 5jose antonioAún no hay calificaciones
- Modelo de Datos Espaciales PDFDocumento5 páginasModelo de Datos Espaciales PDFYerzyd AlconAún no hay calificaciones
- Reporte Practica 3Documento1 páginaReporte Practica 3GABRIEL ISRAEL GONZALEZ CRUZAún no hay calificaciones
- Tercera Práctica Calificada: Pregunta (20 Puntos) : Agregar Las Opciones Al ProgramaDocumento6 páginasTercera Práctica Calificada: Pregunta (20 Puntos) : Agregar Las Opciones Al ProgramaCristhian David ContrerasAún no hay calificaciones
- HistoriadelOrdenador PrimerFinalDocumento11 páginasHistoriadelOrdenador PrimerFinaldvfsdssssAún no hay calificaciones
- 12-Jul. 2013 Cálculo de Dimensiones de ESPESADORESA-RLV y CC 850TMSDDocumento19 páginas12-Jul. 2013 Cálculo de Dimensiones de ESPESADORESA-RLV y CC 850TMSDMax Alva SolisAún no hay calificaciones
- Distribuciones de Muestreo Capitulo 6 LevinDocumento53 páginasDistribuciones de Muestreo Capitulo 6 LevinSofia MeermannAún no hay calificaciones
- 4ensayos No Destructivos - PIPINGDocumento34 páginas4ensayos No Destructivos - PIPINGEdinson Rolando Rodriguez MondragonAún no hay calificaciones
- Jeferson Lopez Taller de MateDocumento4 páginasJeferson Lopez Taller de MatejeferflooAún no hay calificaciones
- Zonas geoastronómicas tierra ciencias 5toDocumento2 páginasZonas geoastronómicas tierra ciencias 5tovaleria risquezAún no hay calificaciones
- Unidad 5 Cinetica de Los Cuerpos Rigidos en El PlanoDocumento68 páginasUnidad 5 Cinetica de Los Cuerpos Rigidos en El Planoamairali62% (13)
- Ees 23 TP Integrador QuimicaDocumento5 páginasEes 23 TP Integrador QuimicaLuján RamosAún no hay calificaciones
- Interpretación de Análisis de Fertilidad Del Suelo Información GeneralDocumento1 páginaInterpretación de Análisis de Fertilidad Del Suelo Información GeneralRudy Puma VilcaAún no hay calificaciones
- Informe VertederosDocumento18 páginasInforme VertederosjoseAún no hay calificaciones
- Procedimiento de Apriete y Torque de Uniones Atornilladas para La Estructura MetalicaDocumento13 páginasProcedimiento de Apriete y Torque de Uniones Atornilladas para La Estructura Metalicalensanz67% (3)
- Lineamiento de Construcción de Santa Cruz de La SierraDocumento10 páginasLineamiento de Construcción de Santa Cruz de La SierraHugo Angel Gomez Callejas100% (1)
- C4 - Calibracion de Modelos Hidráulicos PDFDocumento11 páginasC4 - Calibracion de Modelos Hidráulicos PDFSteve BallmerAún no hay calificaciones
- Cambio de unidades y densidadDocumento45 páginasCambio de unidades y densidadGaby MartinezAún no hay calificaciones
- Guia Tecnica Clavado Gas PolvoraDocumento67 páginasGuia Tecnica Clavado Gas Polvorama_coelloAún no hay calificaciones
- Informe N°03Documento33 páginasInforme N°03brayan garciaAún no hay calificaciones
- Definicion de Los Nombres de La FilosofiaDocumento5 páginasDefinicion de Los Nombres de La FilosofiaEdgar CardenasAún no hay calificaciones