También podría gustarte
- Morales Karla SO R3 U2Documento6 páginasMorales Karla SO R3 U2Karla Morales100% (3)
- 11.1 Pud Matematica Primero Bgu Monica Ortuño Patricio PumaDocumento4 páginas11.1 Pud Matematica Primero Bgu Monica Ortuño Patricio PumaDorian RivasAún no hay calificaciones
- Practica de RectificacionDocumento6 páginasPractica de RectificacionDorian RivasAún no hay calificaciones
- Practica de SemiconductoresDocumento4 páginasPractica de SemiconductoresDorian RivasAún no hay calificaciones
- Inf. Modif - Biela y PistonDocumento15 páginasInf. Modif - Biela y PistonDorian Rivas100% (1)
- Universidad Politecnica Salesiana Pag.Documento7 páginasUniversidad Politecnica Salesiana Pag.Dorian RivasAún no hay calificaciones
- Investigacion ObdDocumento4 páginasInvestigacion ObdDorian RivasAún no hay calificaciones
- Informe CanDocumento5 páginasInforme CanDorian RivasAún no hay calificaciones
- Centros Instantaneos y Centros de Rotacion de VehiculosDocumento21 páginasCentros Instantaneos y Centros de Rotacion de VehiculosDorian Rivas100% (1)
- Informe DisDocumento9 páginasInforme DisDorian RivasAún no hay calificaciones
- Funcion Cuadratica 3Documento27 páginasFuncion Cuadratica 3Sarita PachecoAún no hay calificaciones
- WH Aire AcondicionadoDocumento9 páginasWH Aire AcondicionadoSanti HAún no hay calificaciones
- Mesa de Analogia de StokesDocumento4 páginasMesa de Analogia de StokesConstantino Guevara BAún no hay calificaciones
- 8 Grado GeometriaDocumento4 páginas8 Grado GeometrianancyAún no hay calificaciones
- Foro Simulador MontecarloDocumento4 páginasForo Simulador MontecarloCristian RubioAún no hay calificaciones
- Factorizacion R1Documento2 páginasFactorizacion R1JHON GUSTAVO COSI RAFAELAún no hay calificaciones
- Azufre y MagnetitaDocumento11 páginasAzufre y MagnetitaBasago Minas Lo MejorAún no hay calificaciones
- Diseño de Estructuras de MamposteríaDocumento28 páginasDiseño de Estructuras de MamposteríaKevin Nuño RodriguezAún no hay calificaciones
- Tipos de Mezclas Asfalticas en CalienteDocumento23 páginasTipos de Mezclas Asfalticas en CalienteEliezerChirinosAún no hay calificaciones
- Práctica 5 Halogenación de ParafinasDocumento3 páginasPráctica 5 Halogenación de ParafinasRandy ChanatasiAún no hay calificaciones
- INFORME #7 Proctor ModificadoDocumento18 páginasINFORME #7 Proctor ModificadoRomarioVasquezGomezAún no hay calificaciones
- DesventajasDocumento2 páginasDesventajasDaniel AstudilloAún no hay calificaciones
- Qué Es Un Interruptor de PotenciaDocumento5 páginasQué Es Un Interruptor de PotenciajosejmbnjmbnAún no hay calificaciones
- Producto VectorialDocumento2 páginasProducto VectorialErick CuyuchAún no hay calificaciones
- Parametros de Corte PlasmaDocumento4 páginasParametros de Corte PlasmaDJ-Charlie BrownAún no hay calificaciones
- Cuadro Comparativo de Los Tipos de Soldadura.Documento4 páginasCuadro Comparativo de Los Tipos de Soldadura.MarcoAún no hay calificaciones
- 6 Razones de CambioDocumento13 páginas6 Razones de CambioMathematical ExperiencesAún no hay calificaciones
- Definición de Reino VegetalDocumento6 páginasDefinición de Reino VegetalYuli B. MendozaAún no hay calificaciones
- Flujo de Agua SubterraneaDocumento12 páginasFlujo de Agua SubterraneaCarlos Saldaña ParedesAún no hay calificaciones
- Motoniveladora RG 170 PDFDocumento16 páginasMotoniveladora RG 170 PDFerikvidal0% (1)
- Aplicaciones SIG en La ArqueologíaDocumento10 páginasAplicaciones SIG en La Arqueologíajoaquin anaiz vasquez hernandezAún no hay calificaciones
- El JoropoDocumento6 páginasEl JoropoDagoberto Torres MosqueraAún no hay calificaciones
- Ra CN300 Ccit PDFDocumento16 páginasRa CN300 Ccit PDFElvis SG50% (2)
- Cargas ElectricasDocumento3 páginasCargas ElectricasAlex SolisAún no hay calificaciones
- Modelo Matematico EmpiricoDocumento10 páginasModelo Matematico EmpiricoMixy Pereda TupalayaAún no hay calificaciones
- Velocidad y Ordenes de ReaccionesDocumento44 páginasVelocidad y Ordenes de ReaccionesMARIA ALEJANDRA DUARTE DIAZAún no hay calificaciones
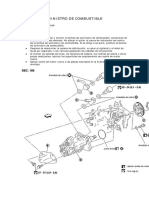
- Nissan Bomba de Suministro de CombustibleDocumento25 páginasNissan Bomba de Suministro de CombustibleIsrael TomalaAún no hay calificaciones
- Lavadora FE 1205: Manual de UsoDocumento26 páginasLavadora FE 1205: Manual de UsoJuan Antonio Palacios ClavijoAún no hay calificaciones