Documentos de Académico
Documentos de Profesional
Documentos de Cultura
07 HFQR 07 de 18
Cargado por
Mario OoTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
07 HFQR 07 de 18
Cargado por
Mario OoCopyright:
Formatos disponibles
UNIVERSIDAD POLITCNICA DE CATALUA
Escuela Tcnica Superior de Ingeniera Industrial de Barcelona
Departamento de Ingeniera Mecnica
Tesis Doctoral
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES
CILNDRICOS RECTOS
Presentada por
HCTOR FABIO QUINTERO RIAZA
Directores
Dr. Salvador Cardona Foix
Dra. Llusa Jordi Nebot
Barcelona, 2006
CAPTULO 2
ESTADO DEL ARTE
Los primeros mtodos de manufactura de engranajes no circulares por generacin
aproximaban la curva primitiva, en torno al punto de tangencia, con una circunferencia y
procedan a realizar el proceso de corte de los dientes de igual forma que en un engranaje
circular. Usualmente este mtodo de generar los dientes era poco preciso, los perfiles de los
dientes no eran conjugados y solo podan utilizarse en operaciones de baja velocidad. La poca
aplicacin, hasta hace unos aos, de los engranajes no circulares se debe tanto a que los
diseadores no haban reconocido su potencial de utilizacin como elementos en un
mecanismo como a la escasez de fabricantes con capacidad de cortar los dientes dentro del
proceso de manufactura de los engranajes. El poco xito de la utilizacin de los engranajes no
circulares tambin se puede atribuir a la gran cantidad de clculos necesarios para un diseo
exacto y una manufactura apropiada.
2.1 APLICACIONES
Ejemplos habituales de aplicaciones de engranajes no circulares son el mecanismo para la
generacin de una funcin y el mecanismo de etapa de entrada a uno ms complejo. En las
aplicaciones que requieren un movimiento con velocidad no uniforme a lo largo de un ciclo es
habitual utilizar mecanismos articulados con pares inferiores. Frente a ellos, los engranajes no
circulares presentan la ventaja de tener una transmisin definida de manera continua, ser de
tamao compacto y poder ser balanceados fcilmente. En los engranajes no circulares, el
eslabn conducido puede girar continuamente sin cambios de sentido cuando la rueda
conductora gira en un mismo sentido, lo que es un punto a favor en comparacin con los
mecanismos de levas; stos solo producen movimiento cclico alternativo. Adicionalmente,
las velocidades de deslizamiento en los engranajes no circulares son menores ya que estn
limitadas por la dimensin del diente.
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
Comnmente se utilizan engranajes elpticos en mquinas automticas, mquinas
empaquetadoras, mecanismos de retorno rpido, bombas y medidoras de caudal figura (2.1).
Se utilizan engranajes en forma oval en el medidor Bopp y Reuter [1], instrumento para medir
el caudal de descarga de un fluido en un proceso.
Figura 2.1 Medidor de caudal [1]
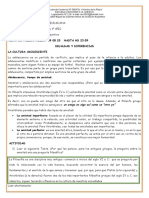
En la figura (2.2) se presenta una rueda dentada no circular utilizada para transformar la
rotacin entre ejes paralelos para un ciclo que excede una revolucin del engranaje. Las
ruedas realizan, durante el ciclo, un movimiento de translacin axial adicional al movimiento
de rotacin.
Figura 2.2 Rueda dentada para transmisin de movimiento axial y giratorio [1]
Los engranajes no circulares tienen aplicacin dentro de las actuales exigencias de los
procesos de conformado de metales. Voelkner [2] presenta como mejora dentro del proceso
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
de manufactura el uso de los engranajes no circulares en el mecanismo conductor, ya que se
puede definir una funcin del desplazamiento del punzn de una prensa en funcin del tiempo
dependiendo de las caractersticas particulares del proceso figura (2.3). As se puede obtener
una prensa mecnica sin la complejidad de procesos de control.
Prensa con
mecanismo convencional
Prensa con
engranajes no circulares
biela
pin
conductor
punzn
manivela
biela
perfil
d [mm] cuasi-sinusoidal
d [mm]
perfil ptimo
punzn
t [s]
t [s]
Extrusin en frio
Embuticin profunda
d [mm]
Forja
d [mm]
d [mm] empalme
suave
v=cte
t [s]
Punzonado
t [s]
Embuticin profunda
con sujetador
d [mm]
d [mm] empalme
suave
tiempo de
contacto corto
Encuado
d [mm]
pausa
pausa
t [s]
t [s]
t [s]
t [s]
Figura 2.3 Desplazamiento del punzn en prensas mecnicas con engranajes no circulares para
distintos procesos de conformado [2]
Un nmero creciente de aplicaciones de procesos de forja en la industria automotriz, que
demandan precisin, est limitado por las mquinas de forja convencionales ya que stas no
son lo suficientemente rpidas para ser utilizadas en los procesos de forja en caliente. Doege
et al. [3, 4] implementaron un diseo numrico de un engranaje no circular para ser utilizado
en el mecanismo conductor de una prensa que garantiza un menor tiempo en el ciclo de alta
ETSEIB UPC
Hctor Fabio Quintero Riaza
10
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
presin y, por lo tanto, una menor carga trmica de la herramienta. La figura (2.4) presenta la
comparacin entre la cinemtica ptima del diseo desarrollado comparada con la cinemtica
de una prensa tradicional; ambas prensas tienen un ciclo de operacin de 1s. La aplicacin del
nuevo mecanismo permite reducir el tiempo de alta presin; mientras que las prensas
tradicionales requieren un tiempo de 75 ms, el nuevo concepto de prensa utilizando
engranajes no circulares disminuye el tiempo a 39 ms. Esto produce un mejor
comportamiento en la curva de temperatura con lo que se puede tener mejor calidad de la
pieza y conservar en buen estado las matrices y las herramientas de corte.
tiempo de enfriamiento
(mecanismo convencional)
d [mm]
300
150
0
0
0,5
1,0
1,5
2,0 t [s]
tiempo de enfriamiento
(utilizando engranajes no circulares)
desplazamiento del punzn
en una prensa convencional
ciclo de alta presin
desplazamiento optimizado
utilizando engranajes no circulares
requerimientos en la
cinemtica del punzn
Figura 2.4 Optimizacin cinemtica de una prensa utilizando engranajes no circulares [3]
Dooner [5] realiza el estudio de los engranajes no circulares como elementos que permiten
reducir las fluctuaciones de velocidad angular debido a las fluctuaciones del par resistente.
Para ello generalmente se realiza el montaje de un volante de inercia en el eje cuyo tamao
depende de la variacin de velocidad permisible. Sin embargo, es posible tambin instalar el
volante en el eje de la rueda conducida de un engranaje no circular diseado para suavizar el
par resistente total. El diseo del engranaje no circular depende de la variacin del par
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
11
resistente. Las fluctuaciones del par resistente y las fluctuaciones de par debido a los
engranajes no circulares se suman para reducir la fluctuacin total resultante. En la figura
(2.5) se presenta el montaje para un mecanismo que requiere ser balanceado.
Disco
balanceador
Mecanismo
Rueda
conducida
Rueda
conductora
Figura 2.5 Mecanismo balanceador con engranajes no circulares [5]
Yao y Yan [6] proponen la utilizacin de engranajes no circulares para balancear mecanismos
de cinco eslabones figura (2.6.a) en los que reemplazan los engranajes circulares por
engranajes no circulares. En su trabajo, los autores proponen dos etapas en el diseo. En la
primera etapa obtienen la sntesis del mecanismo articulado de cinco eslabones, que satisface
una tarea especfica para un nmero limitado de puntos de precisin. Luego optimizan la
relacin de transmisin del engranaje no circular, que reemplazar al engranaje circular, para
reducir las fluctuaciones del par motor; la relacin de transmisin en los puntos de precisin
elegidos es unitaria. En la figura (2.6.b) se observa la disminucin de las fluctuaciones del par
motor al utilizar engranajes no circulares en el mecanismo articulado de cinco eslabones.
P
l3
l2
l4
[N m]
4
4
l5
engranajes
circulares
2
0
l1
engranajes
no circulares
-2
Rueda
conducida
-4
Rueda
conductora
a) Mecanismo de 5 barras
/2
3 /2
2 [rad]
b) Comparacin de la fluctuacin del par motor
Figura 2.6 Disminucin de la fluctuacin del par usando engranajes no circulares [6]
ETSEIB UPC
Hctor Fabio Quintero Riaza
12
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
Han [7] estudia el balanceo de mecanismos especiales para los cuales el autor propone el uso
de engranajes no circulares para disminuir la fluctuacin del par motor. En su trabajo, a
manera de ejemplo, estudia el balanceo de un mecanismo RSSR.
Ogura [8] balancea un motor de combustin interna de un solo cilindro mediante un engranaje
excntrico; el autor dise un aparato especial [9] para medir las componentes vertical y
horizontal de la fuerza y para medir el momento que se transmite al chasis; en sus trabajos
remarca la notable disminucin de las fuerzas excitantes con el diseo propuesto.
Kochev [10] estudi el balanceo activo de los mecanismos articulados para equilibrar las
fuerzas y los momentos debido a la dinmica del mismo y para reducir las fluctuaciones del
par motor; el autor menciona a los engranajes no circulares como uno de los elementos con
los que se puede alcanzar el balanceo propuesto. Kochev [11] tambin estudi el balanceo del
mecanismo articulado a partir de las fluctuaciones de la velocidad del eslabn conductor del
mecanismo; la fluctuacin de la velocidad de este eslabn se reduce al utilizar un eslabn con
mayor inercia. El autor propone utilizar ya sea engranajes no circulares o un motor con
control de velocidad a travs de microcontroladores para obtener el movimiento deseado.
Liu et al. [12] presentan un estudio para utilizar engranajes no circulares en un reductor, que
forma parte de un mecanismo diseado para generar oscilaciones no sinusoidales. El reductor
es instalado entre un electromotor y una leva excntrica. Este oscilador se utiliz en un
proceso de fundicin de acero. Las ventajas del oscilador se verificaron mediante los
resultados experimentales obtenidos en la planta, los cuales demostraron que se redujeron la
profundidad de las marcas del molde sobre los lingotes en el proceso y se mejor la calidad de
la superficie de la fundicin.
Existen trabajos donde se propone la utilizacin de engranajes no circulares en el mecanismo
de la direccin de los automviles. Emura y Arakawa [13] analizan un mecanismo que
incluye unos engranajes elpticos que controlan cada una de las llantas; Dooner [14] propone
un mecanismo de ocho eslabones como alternativa. Los engranajes no circulares se utilizan
para regular los desplazamientos relativos de dos eslabones extremos del mecanismo que
soportan las llantas. En la figura (2.7) se presenta el mecanismo propuesto por Dooner.
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
13
45
-45
-30
2i
-15
0
30
15
2d
2i
2d
0
2i
15
Engranajes
no circulares
Llanta
30
-15
Llanta
-30
-45
45
Figura 2.7 Aplicacin en la direccin de un automvil [14]
Guo y Zhang [15] presentan un estudio de la cinemtica de los engranajes excntricos que
tienen aplicacin en la maquinaria agrcola, especficamente en el tren planetario de los
mecanismos de una cosechadora de arroz. An no existe una solucin analtica de la relacin
entre los desplazamientos angulares de los engranajes excntricos; la contribucin de los
autores consiste en presentar una solucin numrica y confirmar los resultados obtenidos al
compararlos con las medidas directas de un tren planetario con engranajes excntricos. La
figura (2.8) presenta el engranaje planetario excntrico propuesto por los autores que consiste
en cuatro ruedas dentadas excntricas y el brazo H; la rueda 1 es fija.
H
3
3
O1
H
O 1'
H
4
H
O
O
1
a) Posicin inicial
b) Posicin despus de girar el ngulo H
Figura 2.8 Tren planetario excntrico [15]
ETSEIB UPC
Hctor Fabio Quintero Riaza
14
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
La figura (2.9.a) presenta un mecanismo de la cosechadora de arroz con un tren planetario que
incluye ruedas excntricas. El mecanismo consiste en cinco ruedas dentadas excntricas, un
chasis y dos componentes plantadores. El centro de giro de los cinco engranajes excntricos
es soportado por el brazo o chasis. La rueda 1 (planeta) es fija; el chasis (acta como el brazo
H) es el componente de entrada de movimiento y gira alrededor del centro de giro O de la
rueda 1.
satlite (3)
rueda
intermedia (2)
planeta (1)
H
O
2
eslabn
plantador
3
chasis
(brazo)
eslabn
plantador
a) Mecanismo de la cosechadora de arroz
O3'
c3
Posicin despus
de girar H
c2
O2 '
O1
H
O2
O3
1
2
3
b) Tren planetario con ruedas excntricas
Figura 2.9 Esquema del tren planetario propuesto [15]
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
15
Los dos satlites 3, en los que se encuentran los componentes plantadores, son los
componentes de salida. La figura (2.9.b) presenta los movimientos de un engranaje planetario
excntrico conformado por tres ruedas excntricas en los que, debido a la simetra del tren
planetario, los autores estudian el funcionamiento del mecanismo.
En la figura (2.10) se presenta un mecanismo pistn biela manivela propuesto por Jhonson
[16] en el que utiliza unos engranajes elpticos con el fin de obtener un movimiento ms
uniforme de la gua deslizante E comparada con el que se obtiene con una manivela que gira
con velocidad angular constante. Con una manivela normal, la gua obtiene un movimiento
rectilneo que inicia desde un estado de reposo, la velocidad se incrementa gradualmente hasta
el centro de la carrera y entonces decrece hasta regresar a cero en el lado opuesto de la
carrera. Con el engranaje elptico, cuando el pin C se acerca a la posicin extrema
izquierda, la velocidad angular del engranaje conducido y de la manivela aumentan, debido a
que el radio del engranaje conductor aumenta gradualmente. Cuando se inicia el retorno, la
velocidad angular del engranaje conducido y de la manivela disminuyen gradualmente,
porque el radio del engranaje conductor disminuye; cuando la manivela se encuentra en la
posicin en que se obtiene la mayor velocidad del pin, la velocidad angular de la manivela
es mnima, ya que se encuentra engranada por la parte de menor radio del engranaje
conductor. Cuando la manivela se aleja de su posicin central, la manivela es gradualmente
acelerada de tal manera que la velocidad del pin disminuye menos de lo que lo hara
cuando la manivela gira a velocidad angular constante. El autor propone este mecanismo para
prensas pequeas. Con el mecanismo propuesto, la carrera de la gua deslizante es dos veces
la carrera del pin C o cuatro veces la longitud de la manivela.
E
C
D
Figura 2.10 Aplicacin de engranajes elpticos [16]
ETSEIB UPC
Hctor Fabio Quintero Riaza
16
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
Jhonson [16] propuso la aplicacin de engranajes elpticos en la operacin de la vlvula de
alimentacin (slide valve) de una estampadora de vapor (steam stamp) como las que se
utilizaban para triturar rocas. En este caso, el movimiento variable del engranaje se utiliza
para el control del movimiento de la vlvula para admitir vapor por encima del pistn durante
casi toda la carrera de descenso, mientras que, en la carrera de ascenso, se utiliza solo el vapor
necesario para retornar el pistn, con el fin de reducir el consumo de vapor.
Jhonson [16] propuso un diseo de un mecanismo de retorno rpido en el que combina
engranajes elpticos y excntricos con unos engranajes circulares concntricos, tal como se
muestra en la figura (2.11). Las ruedas A y B estn instaladas en el mismo eje. El pin
pequeo A es concntrico con su eje y engrana con la rueda circular partida F. El pin
grande B es excntrico y engrana con la rueda partida elptica H.
H
B
Figura 2.11 Combinacin de engranajes elpticos excntricos con circulares [16]
Por diferencia de dimetros, la rueda A da dos revoluciones por media revolucin de la rueda
semi-circular F y la rueda excntrica B da una revolucin por media revolucin de la rueda
elptica H. Cuando la rueda excntrica conduce a la elptica, el eje conducido incrementa la
velocidad hasta un valor mximo y luego disminuye gradualmente hasta que el pin
concntrico A conduce a la rueda semi-circular F girando a velocidad angular constante. Con
esta combinacin, una revolucin del eje conducido se corresponde con tres revoluciones del
eje conductor. Si esta configuracin de ruedas dentadas se aplica en un mecanismo de retorno
rpido, la carrera de trabajo puede ocurrir cuando el pin A es el conductor, debido a la
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
17
velocidad relativamente suave y uniforme. Cuando la rueda excntrica es la conductora, la
velocidad del eje conducido es gradualmente acelerado y, despus de alcanzar su mximo, se
reduce a la velocidad de corte, por lo que la herramienta sera rpidamente retornada a la
posicin inicial para la siguiente carrera de trabajo.
Cleghorn y Shaw [17] al igual que Ferguson y Kerr [18] proponen un diseo de una
transmisin continuamente variable utilizando engranajes no circulares; Cleghorn y Shaw
estudiaron el par transmitido y las caractersticas de velocidad y eficiencia; Ferguson y Kerr
estudiaron la eficiencia de la transmisin considerando los parmetros del engranaje, la
relacin de transmisin y el flujo de potencia.
Cleghorn y Shaw [17] estudian diferentes alternativas para el diseo de la transmisin. Uno de
las variables de diseo es la relacin de transmisin de los engranajes no circulares; los
autores utilizan una relacin de transmisin con variacin lineal desde una relacin de
transmisin mnima hasta su mximo valor. En la curva de descenso estudian la combinacin
con una curva de retorno lineal o una curva de retorno sinusoidal. En la figura (2.12) se
presentan las curvas primitivas cuando se utiliza el modelo lineal en ambos intervalos, con
una relacin de transmisin mnima de 0,5 y con una relacin mxima de 1,5. Estos autores
utilizan dos engranajes no circulares con idntica ley de desplazamiento para alcanzar
intervalos de velocidad angular constante. La salida de la velocidad angular del conjunto de
engranajes pueden sumarse o restarse mediante un tren planetario.
curva
primitiva 1
curva
primitiva 2
mx
1
O1
O2
curva de
retorno lineal
prom
mn
curva
de trabajo
curva de
retorno sinusoidal
2 1 [rad]
Figura 2.12 Relacin de transmisin para la transmisin continuamente variable [17]
La amplitud de la porcin constante de la velocidad resultante depende del ajuste del ngulo
de fase entre los dos engranajes no circulares. Cleghorn y Shaw obtienen intervalos de
ETSEIB UPC
Hctor Fabio Quintero Riaza
18
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
velocidad angular constante a la salida, cuando utilizan diferenciales con los engranajes no
circulares. En la figura (2.13) se presentan dos de los generadores que los autores proponen en
su estudio.
diferencial
embrague
ENC
2
mx
ENC
1
ENC
2
prom
ENC 1
eje de
entrada
RESULTADO
mn
eje de
salida
2 1 [rad]
a) salida mediante brazo
diferencial
mx
embrague
ENC
2
ENC
1
ENC
2
mn
ENC 1
eje de
salida
eje de
entrada
prom
0
RESULTADO
min
2 1 [rad]
b) salida mediante rueda cnica
Figura 2.13 Engranajes no circulares y esquema del generador [17]
Dooner, Yoon y Seireg [19] proponen utilizar engranajes no circulares en los trenes
planetarios para reducir la potencia recirculante que se define en este tipo de mecanismos y
as disminuir el tamao e incrementar la eficiencia de la transmisin. En la figura (2.14) se
presenta un diagrama esquemtico de la transmisin propuesta por los autores. En el modelo
propuesto por Dooner et al., el eje de salida se corresponde con el eje del planeta P1 de un
diferencial. En su diseo, proponen utilizar un controlador, que no es mostrado en el esquema
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
19
y est ubicado entre los dos engranajes no circulares, para modificar el ngulo de fase entre
los dos engranajes no circulares.
c2
c1
b2
b1
embrague
eje
intermedio
P2
P1
ENC
1
ENC
2
eje de
entrada
EC
eje de
salida
Figura 2.14 Representacin esquemtica de la configuracin del sistema propuesto
por Dooner et al. [19]
Bernard [20] instala en el eje conducido de un engranaje no circular la manivela del
mecanismo pistn biela manivela; el objetivo es tener una relacin entradasalida, definida
como la relacin entre la posicin angular del engranaje conductor y la posicin lineal del
deslizador del mecanismo, que no quede limitada por las dimensiones del mecanismo
articulado y que cumpla con cualquier relacin deseada. Jiang, Zhouji y Li [21] exponen el
diseo de unos engranajes cuasi-elpticos para su aplicacin en la mueca de un robot con lo
que se obtuvo una mueca ms liviana y gil; adems se mejor la precisin de la transmisin
del robot. Librovich [22, 23] presenta un trabajo en el que discute los aspectos de un
novedoso motor rotativo; el autor utiliza engranajes no circulares entre el motor y el volante
para tener velocidad angular constante en el eje del volante. El tren de engranajes que
involucra a un engranaje no circular, permite la reduccin de las vibraciones que se generan
por la transmisin del par. Mine et al. [24] proponen un nuevo diseo para cortar con
precisin placas delgadas utilizando una cizalla rotatoria con control numrico; en esta cizalla,
el tambor de la cizalla es controlado por un servomotor en funcin de la velocidad de la
lmina, y la sincronizacin entre la lmina y las cuchillas se obtiene por unos engranajes no
circulares y por el controlador elctrico de un servomotor de corriente continua.
ETSEIB UPC
Hctor Fabio Quintero Riaza
20
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
Mundo [25] estudia un engranaje planetario que genere relaciones de transmisin variable. El
autor utiliza tres engranajes no circulares en una disposicin tal como se ilustra en la figura
(2.15). La relacin de transmisin entre la velocidad angular de la corona y del satlite
cs = c / s y entre la velocidad angular del satlite y del planeta sp = s / p se
presentan en la figura (2.16).
y [mm]
200
corona
100
planeta
satlite
Op Oc
-200
x [mm]
Os
100
-100
200
-100
-200
Figura 2.15 Curvas primitivas de un tren planetario con relacin de transmisin variable [25]
sp
cs
4
3,5
1,5
2,5
0,5
2
0
6 c [rad]
a) Relacin de transmisin cs
0
0
6 s [rad]
b) Relacin de transmisin sp
Figura 2.16 Relaciones de transmisin entre las ruedas dentadas [25]
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
21
En la figura (2.15) se observa que el centro de rotacin de la corona es diferente del centro de
rotacin del planeta. La distancia entre los centros de rotacin del planeta y del satlite en la
configuracin mostrada no es una variable de diseo y se obtiene de la siguiente restriccin de
la relacin de transmisin entre el satlite y el planeta dada por:
2
sp ( s ) ds =
sp Rs ( s )
Rs ( s )
d s = 2
(2.1)
siendo sp la distancia entre centros del satlite y del planeta, Rs(s) la distancia desde el
centro de rotacin del satlite al centro de velocidad relativo entre el satlite y el planeta.
Mundo presenta un diseo de un mecanismo en las bicicletas de alto rendimiento. El tren
planetario se disea para optimizar la mxima potencia del humano; debido a caractersticas
fisiolgicas y biomecnicas del cuerpo humano, el par que produce un ciclista cuando pedalea
a lo largo de un ciclo de rotacin del pedal es variable. El autor dise el tren planetario de
la figura (2.17) para disminuir las fluctuaciones del par, basado en los estudios del
comportamiento del par de salida en funcin de la posicin angular del pedal.
y [mm]
150
corona
O p Oc
Os
-150
x [mm]
150
planeta
satlite
-150
Figura 2.17 Curvas primitivas del tren planetario ptimo, segn Mundo [25]
Morikawa et al. [26] proponen un mecanismo manivela biela pistn, de un motor de
combustin interna con ignicin por chispa, en el que adaptan un engranaje elptico para
mover rpidamente al pistn cuando se encuentra cerca del punto muerto superior; de esta
forma evitan el golpeteo cuando se tienen altas relaciones de compresin.
ETSEIB UPC
Hctor Fabio Quintero Riaza
22
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
2.2 TEORAS ACERCA DEL DISEO DEL PERFIL DEL DIENTE Y DE LAS
CURVAS PRIMITIVAS
Chironis y Sclater [27] formulan tres posibilidades como punto de partida para el diseo de
las ruedas dentadas de un engranaje no circular: i) se conoce las ecuaciones polares de las
curvas primitivas, ii) se conoce la relacin entre las posiciones angulares de las ruedas y iii) se
conoce la relacin de velocidades angulares; en las tres alternativas tambin se requiere la
distancia entre centros. Los autores presentan las expresiones bsicas para obtener las curvas
primitivas de engranajes elpticos que giran alrededor de sus focos y tambin para el caso en
que giran alrededor de su centro geomtrico. Adicionalmente, presentan las relaciones para
obtener engranajes excntricos, en espiral logartmico y para producir un desplazamiento
angular proporcional a la funcin seno del ngulo de entrada.
Olsson [28] recopila numerosos trabajos relacionados con los engranajes no circulares que
abarcan incluso los presentados en el siglo XIX; el autor estudia los engranajes elpticos y
otros engranajes no circulares y afirma que las curvas base de las ruedas elpticas son elipses
con focos idnticos.
Kuczewski [29] hizo una propuesta para el diseo de dos engranajes elpticos. En su estudio,
el autor propone utilizar dos ruedas conjugadas idnticas. La ecuacin de las curvas primitivas
de las ruedas elpticas es:
x2 y 2
+
=1
a 2 b2
(2.2)
donde a y b son los semiejes de la elipse. Las ruedas giran alrededor de sus focos, F1 y F1.
Cuando la rueda izquierda gira 1, la rueda derecha gira el ngulo conjugado 2 figura
(2.18). En su trabajo, Kuczewski propuso un diseo basado en la idea de generar un perfil de
evolvente desde una curva base elptica. Para encontrar la curva base y superar el
inconveniente del ngulo de presin variable, cre una rueda circular de dimetro d con
igual permetro que la rueda elptica:
(a + b) = d
Hctor Fabio Quintero Riaza
(2.3)
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
23
y
2
1
2b
x
F1
e
F2
F1'
F2'
e
2a
Figura 2.18 Movimientos conjugados de un engranaje elptico [29]
A continuacin, calcul la distancia entre las circunferencias primitiva y base:
h=
d db
2
(2.4)
siendo db el dimetro de la circunferencia base de la rueda circular equivalente:
d b = d cos
(2.5)
y es el ngulo de presin deseado.
Circunferencia
primitiva
Curva primitiva
elptica
db
h
b
h
d
h
Curva base
elptica
Circunferencia
base
Figura 2.19 Rueda equivalente [29]
Para determinar la curva base, el autor rest la distancia h a la longitud de los semiejes, a y b,
de la curva primitiva elptica. El perfil del diente se crea al generar el perfil como la curva
ETSEIB UPC
Hctor Fabio Quintero Riaza
24
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
evolvente a partir de la curva base elptica resultante. En la figura (2.19) se representa la curva
base elptica que resulta de estos procedimientos.
Bloomfield [30] consider el caso de obtener una rueda dentada dividiendo la curva primitiva
en segmentos con radio de curvatura aproximadamente constante. El diente en cada segmento
se corta separadamente como si fuera una porcin de una rueda circular con diferentes
dimetros. En la figura (2.20) se presenta este procedimiento para los dientes 1 y 10, cortados
como si pertenecieran a una rueda circular con radios A y B respectivamente.
B
10
A
1
Figura 2.20 Representacin local de un engranaje no circular por el engranaje circular respectivo [1]
Litvin [1, 31] realiz una extensin de la teora de la generacin del perfil del diente por
curvas de evolvente. En su trabajo, Litvin presenta un estudio profundo de la teora de
engrane. Un gran aporte de este trabajo es el estudio de las condiciones en que se generan
puntos singulares sobre el perfil del diente en el proceso de generacin. Litvin centra su
estudio en el anlisis de las velocidades relativas y la ecuacin de engrane entre la rueda y la
herramienta de corte. En el proceso de generacin, los puntos singulares aparecen cuando la
velocidad de deslizamiento del punto de contacto entre la herramienta y el diente, a lo largo
del perfil del diente, es cero. El autor estudia la generacin del perfil del diente mediante la
simulacin del proceso de corte con cremallera y con pin cortador.
Chang et al. [32] profundizaron el trabajo de Litvin en la manufactura por corte con
cremallera de una rueda elptica. La cremallera tiene un perfil estndar de acuerdo a la norma
AGMA 201.02 (1974). En su trabajo, incluye el redondeo del pie del diente y la holgura entre
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
25
los dientes en la curva primitiva. Los autores utilizan el estudio de Litvin sobre la aparicin de
puntos singulares en el perfil del diente para limitar los parmetros de la cremallera. Los
autores consideran el proceso de manufactura como un proceso en el que se presenta un
movimiento de rodadura pura de la cremallera sobre la curva primitiva elptica. En la figura
(2.21) se presenta el mecanismo generador del diente. En el proceso de generacin, el eje Yc
coincide con la direccin del vector tangente de la curva primitiva elptica en el centro
instantneo de rotacin I.
Yc
Y1
1
Of, O1
Yf
Xc
X1
1
r1
Xf
I
Figura 2.21 Mecanismo generador del diente [32]
Bair [33, 34] presenta un estudio donde disea unos engranajes elpticos con pocos dientes
para una bomba de aceite. En este trabajo se aplican la teora de engrane y la generacin por
cremallera. A diferencia del trabajo de Chang, el autor estudia el efecto del desplazamiento de
la cremallera. Bair analiza en sus estudios la generacin de puntos singulares y considera la
condicin en que se producen dientes en forma de punta.
Bair [35] y Chen y Tsay [36] presentan una propuesta para obtener el perfil del diente para
unos engranajes elpticos utilizando una cremallera cuyo perfil de diente se obtiene por arcos
circulares. El perfil del diente de la cremallera propuesto por los autores genera los dientes de
una rueda elptica con perfiles cncavos y convexos. La compleja geometra del perfil del
diente y los parmetros de diseo como ngulo de presin en cada punto, mdulo, eje mayor y
el radio de los arcos circulares pueden producir interferencia o crear dientes puntiagudos;
ETSEIB UPC
Hctor Fabio Quintero Riaza
26
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
estos problemas se tienen en cuenta en el procedimiento propuesto. Los autores afirman que
los dientes generados por su mtodo tienen menores esfuerzos de contacto, mayor capacidad
de carga y mejores condiciones de lubricacin que los obtenidos por el perfil de evolvente.
Chang y Tsay [37] investigaron la generacin de engranajes no circulares utilizando como
herramienta un pin cortador con el fin de mecanizar aquellos engranes que tienen curvas
primitivas con formas cncavas y convexas donde el mecanizado por cremallera es limitado.
Los autores proponen un modelo matemtico para obtener el perfil en el que consideran,
simultneamente, la trayectoria de la herramienta de corte representado en el sistema
coordenado de la rueda y la ecuacin de los perfiles conjugados. Los autores analizan la
interferencia y la condicin de convexidad de las curvas primitivas para elegir el mdulo del
pin cortador; adems determinan el mnimo nmero de dientes del engranaje no circular
basado en la condicin de interferencia.
Figliolini y Angeles [38, 39] realizan la sntesis del engranaje elptico y de su cremallera
previa definicin del ngulo de presin, de la curvatura mxima y de la distancia entre
centros. En su propuesta obtienen la evolvente de curvas primitivas con regiones cncavas y
convexas. Los autores se basan en el trabajo de Chang y Tsay [37] para generar el perfil del
diente de una rueda elptica con diferentes periodos de rotacin y para elegir el pin cortador
adecuado que evite el contacto mltiple cuando se presentan curvas cncavas y convexas. Los
autores hacen nfasis en utilizar el radio de curvatura mnimo de las curvas primitivas como
criterio de diseo debido a que permite determinar problemas de interferencia, mltiples
puntos de contacto y analizar la concavidad.
Bair [40] obtiene la simulacin del proceso de corte de un engranaje elptico, cuyo centro de
rotacin es su centro geomtrico, en la que utiliza como herramienta de corte un pin
cortador. El modelo matemtico del engranaje elptico se basa en la ecuacin de engrane y en
el mecanismo de generacin de la rueda dentada. En la figura (2.22) se presenta el mecanismo
generador del diente; en el proceso de generacin, el pin cortador gira alrededor del eje Z y
se traslada de forma que las curvas primitivas del pin cortador y de la rueda generada son
tangentes en el centro instantneo de rotacin I. El autor comprueba que no se formen puntos
singulares en el perfil ni dientes puntiagudos durante el proceso de generacin.
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
27
t
Yc
M
Yf
Y1
X1
1 r 1
Of, O1
rs
Xc
Oc
Xf
pin cortador
lnea tangente
curva primitiva elptica
de la rueda generada
Figura 2.22 Generacin del diente por tallado por generacin [40]
Litvin [1] estudia la modificacin de curvas primitivas elpticas basndose en las siguientes
ideas:
(i)
Considerar un punto M de la curva primitiva elptica figura (2.23.a) dado por el
vector de posicin:
O1M = r1 ( 1 ) , 0 1
(ii)
(2.6)
Obtener el punto Mm de la curva primitiva modificada como:
O1M m = r1,m 1 , 0 1 , r1,m = r1
mI
(iii)
(2.7)
Modificar la parte inferior mediante un procedimiento similar con el que se
modific la parte superior, generalmente con mI mII, ver figura (2.23.b).
O1M m = r1,m 1 , 1 2 , r1,m = r1
mII
(2.8)
En la figura (2.23.c) se presentan la curva primitiva elptica y la elptica modificada.
ETSEIB UPC
Hctor Fabio Quintero Riaza
28
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
curva primitiva
elptica
curva primitiva
elptica modificada
Mm
O1
1
mI
2 1
O1
2 1
mII
curva primitiva
elptica
curva primitiva
elptica modificada
Mm
a)
b)
curva primitiva
elptica
O1
curva primitiva
elptica modificada
c)
Figura 2.23 Curvas primitivas modificadas [1]
Litvin [1] combina curvas primitivas elpticas con curvas primitivas elpticas modificadas de
tal forma que la rueda conducida gire una vuelta por mltiples vueltas de la rueda conductora.
En la figura (2.24) se presentan los casos de la combinacin para 2 y 3 vueltas de la rueda
elptica por cada vuelta de la rueda elptica modificada. El autor comprob, en sus trabajos,
que las curvas primitivas de las ruedas conducidas son elipses modificadas.
a) Dos vueltas de la rueda elptica
b) Tres vueltas de la rueda elptica
Figura 2.24 Combinacin de curvas primitivas elpticas con curvas no circulares
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
29
Chironis y Sclater [27] estudian las ecuaciones que permiten obtener un engranaje compuesto
de una rueda excntrica y un engranaje no circular figura (2.25).
r1
a
O1
r2
1
O2
Figura 2.25 Rueda excntrica y rueda no circular [1]
Las ecuaciones bsicas para esta configuracin son:
r1 ( 1 ) = a e sin 1
2
1/ 2
e cos 1 ; r2 ( 1 ) = d r1 ( 1 ) ; 2 ( 1 ) =
d 1 r1 d1
(2.9)
Litvin [1] tambin estudia las ecuaciones de un engranaje excntrico con una rueda no
circular que da n vueltas por vuelta de la rueda excntrica. La curva primitiva de la rueda no
circular es una curva cerrada si se cumple:
2
=
n
r1 ( 1 )
d
d 1
d 1 =
1
2
2
2
d r1 ( 1 )
d
a
e
e
sin
cos
0
1
1
(2.10)
Con la solucin de (2.10) se determina la distancia entre centros d que debe ser resuelta
numricamente.
Existen trabajos que estudian la generacin de curvas primitivas no circulares idnticas. Tong
y Yang [41] proponen un mtodo, al cual denominaron diseo directo del perfil, para generar
curvas primitivas idnticas con geometra diferente de las elpticas y de las exponenciales.
ETSEIB UPC
Hctor Fabio Quintero Riaza
30
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
Estos autores estudian la generacin de curvas primitivas, con diferentes nmeros de lbulos,
y las condiciones geomtricas para obtener continuidad C1 en las puntas y races de los
lbulos. En la figura (2.26.a) se presentan dos curvas primitivas no circulares idnticas. El
segmento A1B1 de la curva primitiva 1, engrana con el segmento D2C2 de la curva primitiva 2.
Debido a que las curvas primitivas son idnticas, el segmento D1C1 de la curva primitiva 1 es
el mismo del segmento D2C2 de la curva primitiva 2. Los puntos B1 y C1 son coincidentes en
el punto E1, por lo que debe cumplirse r1(1) = r2(2) = d/2, siendo 1 el ngulo A1O1E1 y 2 el
ngulo D1O1E1. Para satisfacer la condicin de un nmero entero de lbulos, los ngulos
subtendidos por la mitad del perfil del lbulo A1D1 es decir, 1 + 2 debe ser igual a /N,
siendo N el nmero de lbulos. En la figura (2.26) se presentan curvas primitivas con dos y
tres lbulos obtenidos por los autores.
D1
C1
E1
C2 B1
O2
2
2
1
1
D2 A 1
O1
a) Diseo de las curvas primitivas no circulares idnticas
b) curvas primitivas con 2 lbulos
c) curvas primitivas con 3 lbulos
Figura 2.26 Curvas primitivas idnticas [41]
Yang, Tong y Ling [42] utilizan una funcin de desviacin en la generacin del perfil del
diente en unas ruedas no circulares con curvas primitivas idnticas, obteniendo as un perfil
diferente al perfil de involuta. Los autores definen la funcin de desviacin como la distancia
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
31
entre el punto de contacto y el correspondiente centro instantneo de rotacin relativo de las
curvas primitivas. En otras palabras, la funcin de desviacin mide la cantidad de desviacin
desde un punto del perfil del diente generado hasta la curva primitiva original. En la funcin
de desviacin, la posicin angular del perfil original es la variable de entrada independiente y
determina su cantidad de desviacin. En la figura (2.27) se presentan dos curvas primitivas no
circulares idnticas marcadas como p1 y p2; Yang et al. obtuvieron estas curvas utilizando el
mtodo propuesto en [41]. Las curvas g1 y g2 son los perfiles generados correspondientes. En
la configuracin mostrada en la figura (2.27), P es el punto de contacto entre los dos rotores p1
y p2 y G es el punto de contacto entre los perfiles generados. El mtodo de diseo de la
funcin de desviacin genera el perfil G(1) como una curva offset de la curva P(1) a una
distancia e(1), tal como se muestra en la figura (2.27).
Y
g1
p2
p1
G
e
P 1
O2
O1
g2
Figura 2.27 Curvas primitivas y perfil generado por la funcin de desviacin [41]
Lozzi [43] estudi la curva base asociada con las curvas primitivas de un engranaje no
circular; el autor obtuvo el perfil del diente por dos mtodos: desenrollando una cuerda de la
curva base y por el trazo del punto que se mueve a lo largo de una recta que gira sin deslizar
sobre la curva base. Lozzi propuso cuatro posibles curvas base asociadas a la curva primitiva
en funcin del mtodo con que obtiene la lnea de accin figura (2.28); stas se obtienen por
la combinacin de dos factores: i) el primer factor considera si la lnea de accin forma un
ngulo constante ya sea con la lnea de centros el autor lo denomin PAC o con la tangente
de la curva primitiva PAT; en un engranaje circular se cumplen ambas definiciones; ii) el
segundo factor considera el inicio de la lnea de accin; en un engranaje circular la curva base
ETSEIB UPC
Hctor Fabio Quintero Riaza
32
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
es tangente a la lnea de accin en el punto de inicio E y el radio desde el centro de rotacin
al punto de inicio es normal a la lnea de accin N; las cuatro curvas que el autor obtuvo las
denomin: i) PACE, ii) PATE, iii) PACN y iv) PATN. El perfil del diente del engranaje
no circular lo obtuvo mediante un algoritmo computacional producto de una combinacin de
mtodos numricos y construcciones geomtricas.
lnea de
accin
curva
primitiva
curva
primitiva
curva
primitiva
curva
base
curva
primitiva
curva
base
rb2
rb1
rb2
rb1
curva
base
curva
base
lnea de
accin
lnea
tangente
a) PAC - E
b) PAT - E
curva
primitiva
lnea de
accin
curva
primitiva
curva
base
rb2
curva
primitiva
curva
base
curva
primitiva
rb1
rb2
rb1
curva
base
lnea de
accin
curva
base
lnea
tangente
c) PAC - N
d) PAT - N
Figura 2.28 Curvas base de un engranaje no circular segn Lozzi [43]
Litvin [1] obtiene la curva evoluta del flanco del diente de un engranaje no circular a partir de
la curva evoluta de la curva primitiva. La figura (2.29) muestra la curva primitiva b-b, y su
curva evoluta a-a. El punto Ci es el punto de la evoluta del flanco del diente. Litvin establece
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
33
que el radio de curvatura AiCi de la evoluta del flanco del diente y el radio de curvatura AiBi
de la curva primitiva forman el ngulo y estn relacionados por la expresin:
li = i cos
(2.11)
siendo li = AiCi y i = AiBi.
B1
curva
primitiva
a
evoluta de la
curva primitiva
Ci
A1
li
evoluta
del diente
Ai
Bi
b
Figura 2.29 Curva evoluta del diente [1]
En el caso de un engranaje circular, la curva evoluta de ambos flancos es la curva base [1].
Los flancos derecho e izquierdo del diente de un engranaje no circular tienen diferente curva
evoluta, tal como se presenta en la figura (2.30). El punto O es el centro de curvatura de la
curva primitiva en el punto K; D e I son los puntos correspondientes de la curva evoluta del
flanco derecho e izquierdo que contienen al punto K.
curva
primitiva
D
evoluta flanco
derecho
O1
evoluta flanco
izquierdo
Figura 2.30 Curva primitiva, curva evoluta de ambos flancos del diente [1]
ETSEIB UPC
Hctor Fabio Quintero Riaza
34
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
Figliolini y Angeles [44] obtienen la sntesis de las curvas bases de los engranajes elpticos de
mltiples lbulos, con perfil de diente evolvente, empleando un mtodo similar al mtodo con
que se obtiene la circunferencia base de los engranajes circulares. En la figura (2.31) se
observa un perfil de diente de una rueda, circular o no circular, que se genera considerando
la curva envolvente de la lnea , que es fija a la lnea epicclica , durante el movimiento de
rodadura pura de sobre la curva primitiva no circular .
Figura 2.31 Curva evoluta del perfil [44]
Los autores obtienen la curva base como el lugar geomtrico de los centros de curvatura f
del perfil del diente evolvente con radio de curvatura f. La distancia If, que coincide con
el radio de curvatura f del perfil de diente de evolvente cuando el punto M es coincidente con
I, puede obtenerse mediante el teorema de Euler-Savary [45], dado por:
1
1
1 1
+
cos = +
I f I
(2.12)
siendo I el centro instantneo de rotacin relativo de la lnea epicclica sobre la curva
primitiva ; f es el centro de curvatura del perfil de diente; es el centro de curvatura del
perfil conjugado ; y son, respectivamente, los radios de curvatura en el punto I de la
curva primitiva y de la lnea epicclica .
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
35
Teniendo en cuenta que c = / 2 y que If = f cuando M coincide con I, y que y
son lneas rectas, es decir y I , la expresin (2.12) se simplifica en la
siguiente:
f = sin c
(2.13)
Wu y Chang [46] disean el perfil del diente para un engranaje elptico por el desarrollo de
una evolvente a partir de una curva base; los autores limitan la dimensin del diente por las
curvas de addendum y dedendum apropiadas. Los autores concluyen que cada flanco del
diente presenta una curva base diferente y stas no son curvas elpticas.
Dooner [47] obtuvo la curva base al determinar el lugar geomtrico cuyas tangentes pasan por
los puntos de la curva primitiva; estas tangentes son las lneas de engranaje que vara su
posicin y orientacin en cada punto de la curva primitiva de la rueda dentada. El autor utiliz
la ecuacin diferencial de Clairaut para determinar este lugar geomtrico. La familia de
curvas es la solucin general de la ecuacin diferencial y la curva tangente a esta familia de
curvas es referida como la solucin singular [47]. La familia de curvas f(x, y, ) se encuentran
al girar al vector tangente de la curva primitiva, el ngulo de presin figura (2.32). La familia
de curvas viene dado por:
f (x, y, ) = 0
curva
primitiva
lnea de
accin
(2.14)
t
t
curva
base
(x, y)
(xp , yp)
Figura 2.32 Curva envolvente de las lneas de engranaje (curva base) [47]
ETSEIB UPC
Hctor Fabio Quintero Riaza
36
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
La familia de curvas debe diferenciarse con respecto al parmetro :
f ( x, y, )
=0
(2.15)
Al resolver simultneamente las ecuaciones (2.14) y (2.15) se obtiene la ecuacin paramtrica
de la curva envolvente a las lneas de accin con que Dooner obtuvo la curva base figura
(2.32).
La mayor parte de estos trabajos parten de una forma geomtrica de la curva primitiva, con lo
cual no se puede garantizar la obtencin de una ley de desplazamiento o relacin de
transmisin requerida. Mediante engranajes no circulares es posible obtener una ley de
desplazamiento determinada que permita generar alguna funcin de forma continua y exacta o
cumplir como etapa conductora de un mecanismo complejo que demande una cinemtica de
precisin, sin necesidad de mecanismos complejos de control.
Danieli [48] obtiene engranajes no circulares a partir de la relacin de transmisin de un
mecanismo articulado de cuatro eslabones. El autor propone un mtodo para determinar el
perfil del diente en una rueda de radio variable, caracterizado por un ngulo de presin
constante, por medio de un procedimiento numrico, que integra la ecuacin diferencial que
describe el desplazamiento del punto de contacto a lo largo de la lnea de accin durante el
proceso de engrane. El proceso tiene un algoritmo que determina el cambio de signo en la
derivada del radio para detener el proceso de generacin; segn el autor ste es el punto en el
cual se producen los puntos singulares del perfil del diente, por su similitud con la condicin
en los engranajes circulares.
Cardona y Jordi [49] utilizaron la coordenada angular de la rueda conductora como
coordenada independiente para elaborar un procedimiento analtico que genera las curvas
primitivas y los perfiles de los dientes a partir de la ley de desplazamiento; como ejemplo
disean un engranaje no circular que cumple una ley de desplazamiento dado por una curva
de Bzier de orden 6 y con continuidad C2. En el proceso de diseo, el perfil del diente se
genera a partir de dos cremalleras de dientes rectos conjugadas figura (2.33).
Conceptualmente cada cremallera engrana con una rueda de tal manera que se mantiene la
tangencia entre las cuatro curvas primitivas, mientras cada cremallera realiza el corte de la
rueda correspondiente.
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
37
curva
primitiva 2
curva
primitiva 1
cremallera
complementaria,
corta la rueda 1
O1
I12
O2
cremallera
complementaria,
corta la rueda 2
Figura 2.33 Cremalleras complementarias [49]
Danieli y Mundo [50] disean engranajes no circulares basados en el mismo proceso de [48]
en los que el ngulo de presin para cada diente es constante pero, en su propuesta, vara entre
diente y diente. Los autores disean un engranaje helicoidal no circular para incrementar el
recubrimiento. El volumen primitivo de la rueda la obtuvieron por la extrusin de la curva
primitiva, en la que los dientes envuelven este volumen, con una espiral dando los mismos
beneficios que un engranaje helicoidal tradicional. Para lograr este objetivo, los autores
obtienen un conjunto de secciones de cada rueda dentada con un plano normal al eje de
rotacin, en los que el ngulo de referencia para la generacin de cada diente es compensado
en cada seccin.
Dooner [47] define como funcin de transmisin la relacin entre la posicin angular del
eslabn de entrada y la correspondiente posicin angular del eslabn de salida. En el proceso
de diseo de los engranajes no circulares, Dooner utiliza la relacin entre los desplazamientos
angulares instantneos de la salida que corresponden a los desplazamientos angulares
instantneos de la entrada. El autor obtiene el perfil del diente como la curva evolvente del
punto de la cuerda que se desenrolla de una curva evoluta, la curva base. El mtodo con el que
el autor obtiene las curvas base se describi previamente.
Tsay y Fong [51] proponen utilizar series de Fourier en la aproximacin, ya sea de la curva
primitiva o de la relacin de transmisin, en la fase de diseo de las curvas primitivas de los
engranajes no circulares. Los autores obtienen el engranaje no circular en un proceso de
simulacin de corte por cremallera, similar al proceso desarrollado por Chang et al. [32].
ETSEIB UPC
Hctor Fabio Quintero Riaza
38
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
Fanghella [52] presenta un mtodo para la sntesis de engranajes no circulares que satisfacen
una ley de movimiento dada; el mtodo de sntesis se basa en la extensin del perfil cicloidal
al caso de las curvas primitivas del engranaje no circular. La derivada de la ley de movimiento
son funciones peridicas por lo que el autor propone utilizar la combinacin lineal de
funciones armnicas en la representacin de la ley de movimiento. En su trabajo, el autor
considera el ngulo de presin y el recubrimiento en la evaluacin funcional del engranaje.
Arakawa y Emura [53] realizan un anlisis del recubrimiento en los engranajes no circulares
donde consideran tres tipos de recubrimientos: recubrimiento instantneo, recubrimiento
promedio y recubrimiento equivalente.
Barkah, Shafiq y Dooner [54] obtienen un algoritmo que genera el mallado del perfil de un
diente de una rueda no circular para un anlisis esttico utilizando el mtodo de los elementos
finitos; los autores calculan los esfuerzos del filete del diente, bajo el criterio de Von Mises,
para cada posicin de giro del engranaje.
2.3 MANUFACTURA
Inicialmente, los engranajes no circulares se generaban mediante aplicaciones de mquinas
que simulaban el engrane de la rueda no circular con la herramienta [1]. Un mtodo
tradicional de fabricacin consiste en la utilizacin de fresas modificadas [55].
Olsson [28] dio algunos consejos para el corte del perfil del diente utilizando mquinas
herramientas operadas manualmente. El autor utiliz una fresa madre para el corte de los
dientes; en el proceso de corte, orientaba la fresa madre tangencialmente alrededor de la curva
primitiva de la rueda.
Cunningham [56] implement un control numrico a una cortadora de engranajes Fellows 72
para el corte de las ruedas dentadas de un engranaje no circular. Tambin se utiliz un sistema
rueda maestra y seguidor para sincronizar la herramienta respecto al disco figura (2.34).
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
39
Figura 2.34 Sistema rueda maestra seguidor [55]
Holmes et al. [57] cortan los dientes de un engranaje elptico utilizando una fresadora
equipada con un cabezal divisor. El mtodo utiliza una fresa de forma para el corte de los
dientes en la que el disco es montado en su centro geomtrico sobre un cabezal divisor. El
cabezal divisor, especialmente preparado, controla el ngulo en el que el disco requiere ser
reubicado para el corte de cada diente. La figura (2.35) muestra una mquina Fellow donde
una rueda maestra 1 engrana con una cremallera maestra; en esta mquina, la cremallera 3
corta a la rueda 4.
3
1
Figura 2.35 Generacin de engranajes no circulares por aplicacin de una rueda maestra no circular y
una cremallera [1]
ETSEIB UPC
Hctor Fabio Quintero Riaza
40
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
El equipo desarrollado por Bopp y Reuter figura (2.36) se basa en la simulacin del
engranaje de un tornillo sin fin no circular maestro c con un tornillo sin fin f que es
idntico a la fresa madre d; la rueda no circular que se corta es designada por a; la leva b y
el seguidor e forman el mecanismo de leva diseado para la simulacin de la distancia entre
centros requerida. La principal dificultad de estos procesos fue la necesidad de manufacturar
ruedas maestras no circulares. Un mtodo de generacin de ruedas no circulares que no
necesita la aplicacin de ruedas maestras, se obtiene por mquinas CNC.
d
a
b
Figura 2.36 Generacin por aplicacin de un engranaje sin fin no circular [1]
Kuczewski [29] realiz la manufactura de las ruedas elpticas en un sistema convencional
CAD/CAM y propuso este mtodo para pequeas cantidades debido al tiempo de operacin.
Sin embargo, el autor hizo nfasis en utilizar una mquina de electroerosin por hilo con CNC
cuando se tienen otras formas de ruedas dentadas. Para produccin continua, el autor propone
fabricar una matriz en la mquina CNC para el proceso de conformado de metalurgia de
polvo. Tambin recomienda utilizar la fabricacin por inyeccin para engranajes plsticos.
Egge [58] utiliz un engranaje elptico en un motor stirling con el fin de disminuir las
perdidas por friccin en el mecanismo; para el corte de las ruedas elpticas implement una
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
Captulo 2: ESTADO DEL ARTE
41
rutina en MasterCam que describe la rueda para su posterior corte en una mquina de
electroerosin por hilo figura (2.37).
Figura 2.37 Corte de los dientes de una rueda elptica utilizando una mquina de electroerosin por
hilo [58]
Danieli [48] fabric sus engranajes no circulares en una fresadora CNC. Cardona y Jordi [49]
realizaron la manufactura de unos engranajes no circulares en un centro de mecanizado CNC
figura (2.38).
Figura 2.38 Ruedas mecanizadas por CNC [49]
ETSEIB UPC
Hctor Fabio Quintero Riaza
42
APORTE AL DISEO DE ENGRANAJES NO CIRCULARES CILNDRICOS RECTOS
Danieli y Mundo [50] en el proceso de manufactura de los engranajes elpticos helicoidales,
primero disean el engranaje helicoidal no circular, despus generan el slido con un
programa CAD, Pro-Engineer, y utilizan una mquina de prototipaje rpido para obtener las
ruedas dentadas figura (2.39).
Figura 2.39 Ruedas helicoidales no circulares construidas por una mquina de prototipaje rpido [50]
Dooner [14] integra el diseo con la manufactura mediante un programa computacional
INGEAR desarrollado por Dooner y Seireg [55]; con este programa, el autor codific los
archivos requeridos para el corte de los dientes en un torno de control numrico y en una
mquina de prototipaje rpido figura (2.40).
Figura 2.40 Prototipaje rpido y CNC [14]
Hctor Fabio Quintero Riaza
Departament dEnginyeria Mecnica
También podría gustarte
- Casa Curutchet - La Influencia de La Luz - Reelaboracion-Comisión 5.grupo3Documento3 páginasCasa Curutchet - La Influencia de La Luz - Reelaboracion-Comisión 5.grupo3Valentina LedesmaAún no hay calificaciones
- Charla de 5 Minutos: Un pequeño espacio para grandes educadoresDocumento51 páginasCharla de 5 Minutos: Un pequeño espacio para grandes educadoresMaycol Joel Quispe CumpaAún no hay calificaciones
- Transformacion Del Espacio Urbano de La Ciudad de Culiacán Sinaloa de 1877 A 1900Documento260 páginasTransformacion Del Espacio Urbano de La Ciudad de Culiacán Sinaloa de 1877 A 1900MARIANA LANDEROS MORALESAún no hay calificaciones
- Semana 02 - Teoria Economia, Recursos No Renovables y RenovablesDocumento54 páginasSemana 02 - Teoria Economia, Recursos No Renovables y RenovablesFlor SalasAún no hay calificaciones
- Señales en Tiempo y FrecuenciaDocumento7 páginasSeñales en Tiempo y FrecuenciaHenry ReyesAún no hay calificaciones
- Practica 5 Nematodos-1 PDFDocumento7 páginasPractica 5 Nematodos-1 PDFLITNI MADAI GARCIA RIZOAún no hay calificaciones
- Clase+1+ +Neuro+SeducciónDocumento4 páginasClase+1+ +Neuro+SeducciónCarlos Adrian AguirreAún no hay calificaciones
- Resolucion1618 Agua para PiscinasDocumento19 páginasResolucion1618 Agua para Piscinasmali8664Aún no hay calificaciones
- Guia 4 Fisica MecanicaDocumento12 páginasGuia 4 Fisica MecanicaLaura Valentina Vélez TabaresAún no hay calificaciones
- AgroIndustrial EjercicioDocumento7 páginasAgroIndustrial EjercicioAlex GomezAún no hay calificaciones
- La Puerta A Las HeridasDocumento5 páginasLa Puerta A Las HeridasDavid ZambranoAún no hay calificaciones
- UntitledDocumento189 páginasUntitledCrissel MonRoeAún no hay calificaciones
- M1 Introducción EstadisticaDocumento8 páginasM1 Introducción EstadisticaMarlene Espinoza C.Aún no hay calificaciones
- Simulaciones de fallas en variadores de frecuenciaDocumento110 páginasSimulaciones de fallas en variadores de frecuenciaRaul quispe quispe100% (1)
- Practica Estadistica Ambiental 2019Documento3 páginasPractica Estadistica Ambiental 2019Deneb Rigel50% (2)
- Las Etapas Del Desarrollo Humano-1 SecDocumento3 páginasLas Etapas Del Desarrollo Humano-1 SecCRISTOPHERAún no hay calificaciones
- TRABAJO PRACTICO FEC 1er Año VICTORINO DE LA PLAZADocumento6 páginasTRABAJO PRACTICO FEC 1er Año VICTORINO DE LA PLAZAdayelisss surgaAún no hay calificaciones
- Renacimiento 40Documento11 páginasRenacimiento 40Jose RodriguezAún no hay calificaciones
- Precursores de TerremotosDocumento22 páginasPrecursores de TerremotosJose Maria ZalvideaAún no hay calificaciones
- Trabajo PracticoDocumento8 páginasTrabajo PracticoVic HermosillaAún no hay calificaciones
- La importancia del bien jurídico en el Derecho penalDocumento2 páginasLa importancia del bien jurídico en el Derecho penalELVER GREGORI VILCA QUISPEAún no hay calificaciones
- Guia 4 de Español Cuarto GradoDocumento6 páginasGuia 4 de Español Cuarto GradoYesica AlbarracinAún no hay calificaciones
- CE83 S05 S18 Lab03 TP SolucionesDocumento2 páginasCE83 S05 S18 Lab03 TP SolucionesDiego QuispeAún no hay calificaciones
- Semana 9 y 10 Del 4 Al 12 de Noviembre 2021 Tercero Empre.Documento5 páginasSemana 9 y 10 Del 4 Al 12 de Noviembre 2021 Tercero Empre.José RochaAún no hay calificaciones
- Introduccion A La Gasfiteria Basica - Fenómenos Hidráulicos en Sistemas de Agua A Presión - Curso Virtual Pavco Noviembre 2020Documento53 páginasIntroduccion A La Gasfiteria Basica - Fenómenos Hidráulicos en Sistemas de Agua A Presión - Curso Virtual Pavco Noviembre 2020D - TipAún no hay calificaciones
- Tarea 5 Test ProyectivosDocumento6 páginasTarea 5 Test ProyectivosElizabeth Paredes olivoAún no hay calificaciones
- Lista de Puntos WGS84 - REV01Documento5 páginasLista de Puntos WGS84 - REV01HV FicoAún no hay calificaciones
- Calculo de Banco BateriasDocumento18 páginasCalculo de Banco BateriasEdward Palomino100% (5)
- Universidad Central del Ecuador: Actividad virtual 2 de Planificación Estratégica y GestiónDocumento8 páginasUniversidad Central del Ecuador: Actividad virtual 2 de Planificación Estratégica y GestiónCristel Dominguez LopezAún no hay calificaciones
- Ade ArticulosDocumento6 páginasAde ArticulosWilmer Rios DiazAún no hay calificaciones