También podría gustarte
- Soledad Mijuskovic LIBRODocumento242 páginasSoledad Mijuskovic LIBROFernando Barboza100% (1)
- El Proyecto MontaukDocumento172 páginasEl Proyecto MontaukAnonymous xKkcNEyGAún no hay calificaciones
- Rosa Montero. La Ridicula IdeaDocumento11 páginasRosa Montero. La Ridicula IdeaAzhrLo62% (13)
- Manual de Organización y Funciones Del Departamento de Servicio SocialDocumento92 páginasManual de Organización y Funciones Del Departamento de Servicio Socialpichon2000Aún no hay calificaciones
- 2 Series de PotenciasDocumento19 páginas2 Series de PotenciasAdal ZaidAún no hay calificaciones
- DÍda Obi (La Adivinacion Del Coco)Documento11 páginasDÍda Obi (La Adivinacion Del Coco)Miguel Angel Diaz BenitezAún no hay calificaciones
- Breve Historia MatematicasDocumento2 páginasBreve Historia MatematicasJohan CarrascoAún no hay calificaciones
- Informe PsicodinamicoDocumento9 páginasInforme PsicodinamicoCamila Andrea ACOSTA GUEVARAAún no hay calificaciones
- Presentación Vanguardias e IsmosDocumento18 páginasPresentación Vanguardias e IsmosJaviera Alonso VenegasAún no hay calificaciones
- La Reseña Literaria BDocumento2 páginasLa Reseña Literaria BkatipaoAún no hay calificaciones
- DiscursoDocumento3 páginasDiscursoAnthony RochaVAún no hay calificaciones
- Allan Scott - Fracasa en GrandeDocumento150 páginasAllan Scott - Fracasa en GrandejankasAún no hay calificaciones
- Francisco Xandoval: Turquestàn ChinoDocumento4 páginasFrancisco Xandoval: Turquestàn ChinoAnita PretellAún no hay calificaciones
- La Respuesta de Kant Al Problema de La MetafísicaDocumento33 páginasLa Respuesta de Kant Al Problema de La Metafísicajose martinezAún no hay calificaciones
- Cómo Organizar y Presentar Trabajos AcadémicosDocumento31 páginasCómo Organizar y Presentar Trabajos AcadémicosFernandoEnriqueAún no hay calificaciones
- Microscopio, Estereoscopio, Telescopio, Cuestionario, Preguntas Cerradas, Dicotomicas, Seleccion Multiple, Chequeo de Opciones, Encuesta, EntrevistaDocumento4 páginasMicroscopio, Estereoscopio, Telescopio, Cuestionario, Preguntas Cerradas, Dicotomicas, Seleccion Multiple, Chequeo de Opciones, Encuesta, EntrevistaJose Miguel DelgadoAún no hay calificaciones
- Publicidad, Consumo y GéneroDocumento15 páginasPublicidad, Consumo y GéneroAngie ReyesAún no hay calificaciones
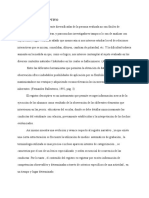
- Registro DescriptivoDocumento8 páginasRegistro DescriptivoVeronica Arroyo VidalonAún no hay calificaciones
- 1 Definición de Los Activos FijosDocumento18 páginas1 Definición de Los Activos FijosEmilio MartínezAún no hay calificaciones
- Descargue Gratuitamente COACHINGDocumento3 páginasDescargue Gratuitamente COACHINGIsaias CastroAún no hay calificaciones
- Cuestionario de Incret Participacion DeltrabajadorDocumento2 páginasCuestionario de Incret Participacion DeltrabajadorKevin J. Ceballos C.100% (2)
- Proy Min4421 LunesDocumento24 páginasProy Min4421 LunesDaniela PortilloAún no hay calificaciones
- 03 GUÍA No. 1 DE FILOSOFIA 10°Documento7 páginas03 GUÍA No. 1 DE FILOSOFIA 10°melicarderonAún no hay calificaciones
- Cali Ciudad Abierta Arte y CinefiliaDocumento321 páginasCali Ciudad Abierta Arte y CinefiliaerdiazruizAún no hay calificaciones
- Mensaje Del Maestro Ascendido Kuthumi: Yo Soy La SABIDURÍA Del Amor en AcciónDocumento3 páginasMensaje Del Maestro Ascendido Kuthumi: Yo Soy La SABIDURÍA Del Amor en AcciónLeticia Gamboa VizcaínoAún no hay calificaciones
- Cocault TrabajoFinalDocumento11 páginasCocault TrabajoFinalEléaAún no hay calificaciones
- Estudio de Tiempos Problemas ResueltosDocumento6 páginasEstudio de Tiempos Problemas ResueltosDavid BanegasAún no hay calificaciones
- Semana 9 Analisis Por Cargas HorizontalesDocumento21 páginasSemana 9 Analisis Por Cargas HorizontalesNewton Alfaro QuispeAún no hay calificaciones
- Irap e Inducción de EmocionesDocumento17 páginasIrap e Inducción de EmocionesAngie PeñaAún no hay calificaciones
- El Águila Que Creía Ser Una GallinaDocumento4 páginasEl Águila Que Creía Ser Una Gallinadondo100% (1)