También podría gustarte
- Manual para El Diseño de Instalaciones Electricas Industriales LivianasDocumento144 páginasManual para El Diseño de Instalaciones Electricas Industriales LivianasGutierrez Edy0% (1)
- Electricidad INSHT 18 PagDocumento18 páginasElectricidad INSHT 18 PagFrancisco RomeroAún no hay calificaciones
- Tabulador 19 Marzo 2012Documento249 páginasTabulador 19 Marzo 2012cristobal0686Aún no hay calificaciones
- Tabulador Civ Enero 2012Documento2 páginasTabulador Civ Enero 2012Ubencio Ramón Valero PetitAún no hay calificaciones
- Practica 1Documento5 páginasPractica 1cristobal0686Aún no hay calificaciones
- InternetDocumento44 páginasInternetcristobal0686Aún no hay calificaciones
- Instalaciones eléctricas y materiales 2012-2013Documento4 páginasInstalaciones eléctricas y materiales 2012-2013cristobal0686Aún no hay calificaciones
- Cable de Bateria - PDIC01234SDocumento2 páginasCable de Bateria - PDIC01234Scristobal0686Aún no hay calificaciones
- Ceica MaracaiboDocumento1 páginaCeica Maracaibocristobal0686Aún no hay calificaciones
- RUSNIEUDocumento4 páginasRUSNIEUcristobal0686Aún no hay calificaciones
- Conexion de Motores Trifasicos de 6, 9 y 12 PuntasDocumento9 páginasConexion de Motores Trifasicos de 6, 9 y 12 PuntasJorge Alberto Peña Rodriguez88% (8)
- SerialDocumento1 páginaSerialcristobal0686Aún no hay calificaciones
- MEER - Tarea UA1Documento5 páginasMEER - Tarea UA1randuAún no hay calificaciones
- Microswitches PDFDocumento9 páginasMicroswitches PDFAndres CamachoAún no hay calificaciones
- Semana f18 Circuitos Electricos L Flores 2024-I SCDocumento7 páginasSemana f18 Circuitos Electricos L Flores 2024-I SCAlison Ariana Pineda CorderoAún no hay calificaciones
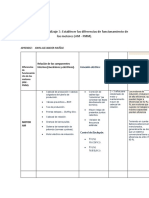
- Actividad de Aprendizaje 3Documento12 páginasActividad de Aprendizaje 3alexander muñozAún no hay calificaciones
- Biomagnetismo y sus efectos enDocumento8 páginasBiomagnetismo y sus efectos enAlberto IsazaAún no hay calificaciones
- Norma Técnica NTC Colombiana 3504Documento39 páginasNorma Técnica NTC Colombiana 3504Schneider CastilloAún no hay calificaciones
- Operaciony Manejo Del Lavador de ElisaDocumento91 páginasOperaciony Manejo Del Lavador de Elisavirologia virologiaAún no hay calificaciones
- Guia FS-19 Magnetismo (WEB) 2010Documento20 páginasGuia FS-19 Magnetismo (WEB) 2010Avend Slainer100% (1)
- Campos MagnéticosDocumento5 páginasCampos MagnéticosJesus HernandezAún no hay calificaciones
- Cómo Hacer Un Generador EléctricoDocumento17 páginasCómo Hacer Un Generador Eléctricotito cuadrosAún no hay calificaciones
- El Poder de MagnetoDocumento7 páginasEl Poder de MagnetoFer DiazAún no hay calificaciones
- 2.1. Magnetización: 2. MagnetismoDocumento29 páginas2.1. Magnetización: 2. MagnetismoRodas Ochoa Álvaro MauricioAún no hay calificaciones
- Diseno y Construccion de Un Transductor Acustico Electromagnetico PDFDocumento107 páginasDiseno y Construccion de Un Transductor Acustico Electromagnetico PDFElias Romero IVAún no hay calificaciones
- Experiencia 5 Lab 120 22020Documento3 páginasExperiencia 5 Lab 120 22020RobertoTorreesAún no hay calificaciones
- MagnetismoDocumento275 páginasMagnetismoAlex MorenoAún no hay calificaciones
- INFORME 11 de Labo de Fisica 3Documento23 páginasINFORME 11 de Labo de Fisica 3luis100% (2)
- Campos magnéticos estacionarios: Relación B-r y medición de μ0Documento7 páginasCampos magnéticos estacionarios: Relación B-r y medición de μ0Nathaly Nicoll Cespedes Flores100% (1)
- Interacción Electromagnética2016Documento24 páginasInteracción Electromagnética2016Antonio MuñozAún no hay calificaciones
- Manual para Enc. Electrico.Documento427 páginasManual para Enc. Electrico.Alejandro Velazquez SantitoAún no hay calificaciones
- LCN (1-A Primera Parte) Lectura de Cartas y NavegaciónDocumento32 páginasLCN (1-A Primera Parte) Lectura de Cartas y Navegaciónyolo xDxDAún no hay calificaciones
- Hogan Jakovlewich Patent ES0225316 PDFDocumento8 páginasHogan Jakovlewich Patent ES0225316 PDFJorge RodriguezAún no hay calificaciones
- MagnetismoDocumento4 páginasMagnetismoAngelAún no hay calificaciones
- Examen de Física ExperimentalDocumento4 páginasExamen de Física Experimentalagonzalez365Aún no hay calificaciones
- Controlador de Un Elevador Con El PLC S7-200Documento77 páginasControlador de Un Elevador Con El PLC S7-200gos1000100% (1)
- Biomagnetismo Psicoemocional PDFDocumento294 páginasBiomagnetismo Psicoemocional PDFMarcela Karina Muslera Gardiol85% (26)
- Examen Ultimo de RamkngDocumento2 páginasExamen Ultimo de RamkngCarlos ManolAún no hay calificaciones
- Prácticas E y MDocumento51 páginasPrácticas E y MLeonardo VzAún no hay calificaciones
- Practica de Elaboracion de Un ElectroimanDocumento8 páginasPractica de Elaboracion de Un ElectroimanLiZzii RochaAún no hay calificaciones
- El magnetismo y sus aplicaciones en la vida cotidiana y tecnologíaDocumento15 páginasEl magnetismo y sus aplicaciones en la vida cotidiana y tecnologíaAlberto Armenta SalgadoAún no hay calificaciones
- Calentamiento Por MicroondasDocumento12 páginasCalentamiento Por MicroondasSvdra WlznAún no hay calificaciones