También podría gustarte
- Ciclo de MarchaDocumento3 páginasCiclo de MarchaBenja DietzAún no hay calificaciones
- Sistemas Automáticos de Extinción de Incendios para La Protección de Motores de VehículosDocumento5 páginasSistemas Automáticos de Extinción de Incendios para La Protección de Motores de VehículosarwisisAún no hay calificaciones
- Coordinacion de Protecciones Contra SobrecorrienteDocumento85 páginasCoordinacion de Protecciones Contra SobrecorrienteFabian PerezAún no hay calificaciones
- Impacto Ambiental Del Sector de La Construcción - Fábio Maia GuzenskiDocumento232 páginasImpacto Ambiental Del Sector de La Construcción - Fábio Maia GuzenskiRicardo MantariAún no hay calificaciones
- Repair Parts Manual Manual de Repuestos: English/SpanishDocumento36 páginasRepair Parts Manual Manual de Repuestos: English/SpanishTyler PetersAún no hay calificaciones
- Traducir OpenBravo ERP Version 2.4Documento4 páginasTraducir OpenBravo ERP Version 2.4Fabian Alejandro Moná MartinezAún no hay calificaciones
- Cálculo Del Rendimiento Del ConcretoDocumento2 páginasCálculo Del Rendimiento Del ConcretoEfrain Sotelo Buatista100% (1)
- Clase #1Documento8 páginasClase #1BENJAMIN EMANUEL ALMEIDA QUILUMBANGOAún no hay calificaciones
- MB312D IDocumento49 páginasMB312D IREMI Q. TOLAAún no hay calificaciones
- EHV XLPE Cable Systems SPDocumento52 páginasEHV XLPE Cable Systems SPnalvaro88Aún no hay calificaciones
- Motor Suzuki 350 - Septiembre 2017Documento2 páginasMotor Suzuki 350 - Septiembre 2017Martin Alejandro D'EliaAún no hay calificaciones
- Teoría de La DualidadDocumento13 páginasTeoría de La DualidadMarcela Pabon ReyesAún no hay calificaciones
- 2UNID Problemas de Calderas Acuotubulares PDFDocumento12 páginas2UNID Problemas de Calderas Acuotubulares PDFSamir GalanAún no hay calificaciones
- 1.1.2.1 B - I + E I Pauta de Entrevista en Profundidad A UsuarioDocumento2 páginas1.1.2.1 B - I + E I Pauta de Entrevista en Profundidad A UsuarioRodolfo GarridoAún no hay calificaciones
- Ast T-Set 017 Instalacion de Interruptor de Potencia Con Camión GrúaDocumento3 páginasAst T-Set 017 Instalacion de Interruptor de Potencia Con Camión GrúaCarlos RodasAún no hay calificaciones
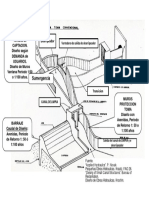
- Diseño de BocatomasDocumento1 páginaDiseño de BocatomasLG Bim RevitAún no hay calificaciones
- Maquinas Hidraulicas 20171 PDFDocumento5 páginasMaquinas Hidraulicas 20171 PDFmauroAún no hay calificaciones
- Granja de Cría y Engorde REQUERIMIENTO TECNICODocumento7 páginasGranja de Cría y Engorde REQUERIMIENTO TECNICOBertha Villanueva GomezAún no hay calificaciones
- Libro El Maquinista 3.0Documento351 páginasLibro El Maquinista 3.0Eduard CórdovaAún no hay calificaciones
- Mega ConstruccionesDocumento7 páginasMega ConstruccionesDyltrax LazAún no hay calificaciones
- Guía de LaboratorioDocumento5 páginasGuía de LaboratorioHarol Junior CBAún no hay calificaciones
- Super Fácil Antena VHF 1Documento4 páginasSuper Fácil Antena VHF 1panaqueespiAún no hay calificaciones
- Practica de Campo Semana 1Documento16 páginasPractica de Campo Semana 1yuberAún no hay calificaciones
- Reporte Cableado EstructuradoDocumento14 páginasReporte Cableado EstructuradoalanAún no hay calificaciones
- 6 Metodo Esfuerzos PermisiblesDocumento29 páginas6 Metodo Esfuerzos PermisiblesVICTOR ROLANDO CASTRO DEL CARPIOAún no hay calificaciones
- Articulo Sistema de Proteccion SismicaDocumento37 páginasArticulo Sistema de Proteccion SismicaDiseño de ProyectosAún no hay calificaciones
- Bomba de Engranajes Externos.Documento15 páginasBomba de Engranajes Externos.J Benito MartinezAún no hay calificaciones
- Pirrotina y CinabrioDocumento4 páginasPirrotina y CinabrioJOELAún no hay calificaciones
- Diseno Geometrico de CarreterasDocumento5 páginasDiseno Geometrico de CarreterasRaul Madrigal BravoAún no hay calificaciones
- Laboratorio 3. GranulometriaDocumento19 páginasLaboratorio 3. GranulometriaCamila RodriguezAún no hay calificaciones