También podría gustarte
- Introducción A Microcontroladores ARDUINODocumento34 páginasIntroducción A Microcontroladores ARDUINOJesus Custodio PisfilAún no hay calificaciones
- Elementos de MandoDocumento12 páginasElementos de MandoJesus Custodio Pisfil100% (2)
- Programacion de Inter-Vlan y DHCPDocumento6 páginasProgramacion de Inter-Vlan y DHCPJesus Custodio PisfilAún no hay calificaciones
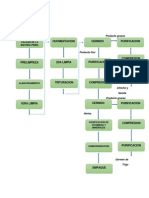
- Diagrama de Bloques Del ProcesoDocumento1 páginaDiagrama de Bloques Del ProcesoJesus Custodio PisfilAún no hay calificaciones
- 2-Problemas Sobre Modulaciones Analogicas de Pulsos - Sistemas PCM y Multiplex Por Division en TiempoDocumento10 páginas2-Problemas Sobre Modulaciones Analogicas de Pulsos - Sistemas PCM y Multiplex Por Division en TiempoJesus Custodio PisfilAún no hay calificaciones
- Moral y EticaDocumento25 páginasMoral y EticaJesus Custodio PisfilAún no hay calificaciones
- Moral y EticaDocumento25 páginasMoral y EticaJesus Custodio PisfilAún no hay calificaciones
- Aunque La Fibra Óptica Es Una Innovación en La Tecnología de Las TelecomunicacionesDocumento2 páginasAunque La Fibra Óptica Es Una Innovación en La Tecnología de Las TelecomunicacionesJesus Custodio PisfilAún no hay calificaciones
- ConclusionesDocumento9 páginasConclusionesJesus Custodio PisfilAún no hay calificaciones
- Informe de FibraDocumento28 páginasInforme de FibraJesus Custodio PisfilAún no hay calificaciones
- Trans y RecepDocumento15 páginasTrans y RecepJesus Custodio PisfilAún no hay calificaciones
- Acopladores ÓpticosDocumento24 páginasAcopladores ÓpticosJesus Custodio PisfilAún no hay calificaciones
- El Multimetro y Sus AplicacionesDocumento4 páginasEl Multimetro y Sus AplicacionesMaximiliano Diaz ArancibiaAún no hay calificaciones
- El Timbre ElectricoDocumento8 páginasEl Timbre ElectricofelixanibalAún no hay calificaciones
- PRUEBA DE ANÁLISIS Inicio FotovoltaicaDocumento3 páginasPRUEBA DE ANÁLISIS Inicio FotovoltaicaMatías Palacios Poblete100% (1)
- REDES DE DISTRIBUCION CLASES - Estructuras Fundamentales MT Y BT - 23 MARZO 2020Documento13 páginasREDES DE DISTRIBUCION CLASES - Estructuras Fundamentales MT Y BT - 23 MARZO 2020luis alvarado100% (1)
- Taller 2 - Aplicaciones EDO Orden UnoDocumento2 páginasTaller 2 - Aplicaciones EDO Orden UnoJefferson QuiguantarAún no hay calificaciones
- Modulador y Demodulador de Amplitud Con LM1496Documento4 páginasModulador y Demodulador de Amplitud Con LM1496Richard Grisales ArboledaAún no hay calificaciones
- Efecto de Los Armónicos en TransformadoresDocumento22 páginasEfecto de Los Armónicos en TransformadoresHenry GarcesAún no hay calificaciones
- Proteccion Montaje de Transformador de 25 KvaDocumento7 páginasProteccion Montaje de Transformador de 25 KvaAndres ZambranoAún no hay calificaciones
- GFPI-F-019 - Formato - Guia - de - Aprendizaje Controles Electricos MecatronicaDocumento11 páginasGFPI-F-019 - Formato - Guia - de - Aprendizaje Controles Electricos MecatronicaCristian M Gomez100% (1)
- Manual de Seguridad en Pirotecnia, ElectricidadDocumento35 páginasManual de Seguridad en Pirotecnia, ElectricidadE Alejandro MantecónAún no hay calificaciones
- Borneras y Canaletas ElectricasDocumento9 páginasBorneras y Canaletas ElectricasAYLLÓN ALCÍVARAún no hay calificaciones
- Amplificador en Cascada Transistor BJTDocumento11 páginasAmplificador en Cascada Transistor BJTDan TabarezAún no hay calificaciones
- Estabilizacion de PolarizacionDocumento10 páginasEstabilizacion de PolarizacionBruno MtAún no hay calificaciones
- Formato IEEEDocumento3 páginasFormato IEEEjuan_camilo6180Aún no hay calificaciones
- MEGGERDocumento11 páginasMEGGERYunior BejaranoAún no hay calificaciones
- Informe3 PLCDocumento5 páginasInforme3 PLCAnonymous HJWKH1QPm7Aún no hay calificaciones
- Informe Transformador TrifásicoDocumento33 páginasInforme Transformador TrifásicoPablo Droguett67% (6)
- Gewiss CatalogoDocumento30 páginasGewiss CatalogojavisierraAún no hay calificaciones
- Sistema de Carga Automotriz 23Documento24 páginasSistema de Carga Automotriz 23Ronald ChavezAún no hay calificaciones
- IEEE. Análisis de Estabilidad de Sist - Electrónicos de Potencia - Práctica DocenteDocumento8 páginasIEEE. Análisis de Estabilidad de Sist - Electrónicos de Potencia - Práctica DocenteAlejandro VasquezAún no hay calificaciones
- Aplicación de Flujo de Carga Directo A Redes de Gran TamañoDocumento229 páginasAplicación de Flujo de Carga Directo A Redes de Gran TamañoAnonymous B4cO8rM7Aún no hay calificaciones
- Caso Practico Riesgos Electricos U2Documento3 páginasCaso Practico Riesgos Electricos U2divaAún no hay calificaciones
- Formulario de Sol de Sum de Ener Elec Bajo El Regimen de AportacionesDocumento1 páginaFormulario de Sol de Sum de Ener Elec Bajo El Regimen de AportacionesJosue Carmona88% (8)
- Practica 1 JacomeDocumento5 páginasPractica 1 JacomeNicole FortisAún no hay calificaciones
- Codios de FallaDocumento17 páginasCodios de FallaLUIS100% (4)
- Capacitancia CondensadoresDocumento28 páginasCapacitancia CondensadoresIgnacio Nacho Miranda Contreras50% (4)
- GM 3125 PDFDocumento2 páginasGM 3125 PDFCesar Augusto Arias CastroAún no hay calificaciones
- MicroDocumento5 páginasMicroBryanTAAún no hay calificaciones
- Ejercicios de Potencial Electrico PDFDocumento3 páginasEjercicios de Potencial Electrico PDFRaúl GaroAún no hay calificaciones
- Electronica Enlace Covalente y Materiales IntrínsecosDocumento10 páginasElectronica Enlace Covalente y Materiales IntrínsecosMarlon OrozcoAún no hay calificaciones