También podría gustarte
- Distribución ChiDocumento1 páginaDistribución Chijljo89Aún no hay calificaciones
- Javier Castañeda-William Arenas-Ecografia Ocular Mediante UltrasonidoDocumento4 páginasJavier Castañeda-William Arenas-Ecografia Ocular Mediante Ultrasonidojljo89Aún no hay calificaciones
- Javier Castañeda-William Arenas-Ecografia Ocular Mediante UltrasonidoDocumento4 páginasJavier Castañeda-William Arenas-Ecografia Ocular Mediante Ultrasonidojljo89Aún no hay calificaciones
- Articulo Barros GonzalezDocumento2 páginasArticulo Barros Gonzalezjljo89Aún no hay calificaciones
- Articulo de Revision - Jhon Barras, Jose GutierrezDocumento4 páginasArticulo de Revision - Jhon Barras, Jose Gutierrezjljo89Aún no hay calificaciones
- Articulo Cientifico - José Jiménez, Nemesio RodriguezDocumento5 páginasArticulo Cientifico - José Jiménez, Nemesio Rodriguezjljo89Aún no hay calificaciones
- Copia de Ecgrafo 1222146162808843 9Documento13 páginasCopia de Ecgrafo 1222146162808843 9jljo89Aún no hay calificaciones
- Maquinas Electricas RotativasDocumento40 páginasMaquinas Electricas Rotativashulkco2Aún no hay calificaciones
- Ecografia, Historia, Concepto y FísicaDocumento12 páginasEcografia, Historia, Concepto y Físicadeathlife12Aún no hay calificaciones
- SegmentacionDocumento21 páginasSegmentacion3133266239Aún no hay calificaciones
- IntmlabDocumento0 páginasIntmlabjljo89Aún no hay calificaciones
- Tomografía Computarizada Por Rayos X Fundamentos y Actualidad PDFDocumento19 páginasTomografía Computarizada Por Rayos X Fundamentos y Actualidad PDFlithium2203Aún no hay calificaciones
- Clave 837 TraduccionDocumento1 páginaClave 837 Traduccionjljo89Aún no hay calificaciones
- Mama 1Documento14 páginasMama 1rkasa080Aún no hay calificaciones
- MamografiaDocumento3 páginasMamografiajkn2610Aún no hay calificaciones
- MATLABDocumento47 páginasMATLABLeonardo Gabriel Fernández GottardiniAún no hay calificaciones
- Producción de Los Rayos X PDFDocumento7 páginasProducción de Los Rayos X PDFOscar DurangoAún no hay calificaciones
- IntmlabDocumento0 páginasIntmlabjljo89Aún no hay calificaciones
- TALLER DE IMÁGENES DIAGNÓSTICAS - CorregidoDocumento9 páginasTALLER DE IMÁGENES DIAGNÓSTICAS - Corregidojljo89Aún no hay calificaciones
- Capacitores ComercialesDocumento1 páginaCapacitores ComercialesPau SpindolaAún no hay calificaciones
- Software de Aplicación y Analisis de ResultadoDocumento41 páginasSoftware de Aplicación y Analisis de Resultadoleticia amaroAún no hay calificaciones
- TareaDocumento9 páginasTareaEfrain Tunqui0% (1)
- Pliegos 293 393Documento101 páginasPliegos 293 393GaliousAún no hay calificaciones
- Las QuemadurasDocumento4 páginasLas Quemadurasthecrow33Aún no hay calificaciones
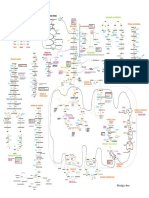
- Mapa MetabólicoDocumento1 páginaMapa MetabólicoJorge Pantoja60% (5)
- Tema3 PDFDocumento15 páginasTema3 PDFrosaAún no hay calificaciones
- Practica1. Laboratorio Maquinas Eléctricas FIDocumento6 páginasPractica1. Laboratorio Maquinas Eléctricas FISevy Tom ZoriuqAún no hay calificaciones
- Ciclo de RankineDocumento3 páginasCiclo de RankineCarlos R GtzAún no hay calificaciones
- Breve Revisión Del Desarrollo Del XFEMDocumento4 páginasBreve Revisión Del Desarrollo Del XFEMKevin Patrón HernandezAún no hay calificaciones
- Clase 1 20-03-18I IntroducciónDocumento49 páginasClase 1 20-03-18I IntroducciónrensoAún no hay calificaciones
- SOLUCIONES BUFFER Acido Citrico EjercicioDocumento11 páginasSOLUCIONES BUFFER Acido Citrico EjercicioSheilaAtauquiSoto67% (3)
- Comunicación No VerbalDocumento18 páginasComunicación No Verbalruth_rh2Aún no hay calificaciones
- C 06 Sostenimiento y Revestimiento de TunelesDocumento164 páginasC 06 Sostenimiento y Revestimiento de Tunelesmontesderoca3Aún no hay calificaciones
- Grissini - Palitos de Pan para Aperitivos y Picoteo - Recetas de EsbietaDocumento6 páginasGrissini - Palitos de Pan para Aperitivos y Picoteo - Recetas de Esbietagabriel_sulbaránAún no hay calificaciones
- Electricidad BasicaDocumento32 páginasElectricidad BasicaGustavo Flores Díaz0% (1)
- Texto Sistemas de Manufactura Reconfigurable 20111Documento141 páginasTexto Sistemas de Manufactura Reconfigurable 20111luisbarrios1040% (1)
- Norma INV E-215-07 PDFDocumento3 páginasNorma INV E-215-07 PDFjucagalAún no hay calificaciones
- Protex AdikreteDocumento2 páginasProtex AdikreteLenin ZamoraAún no hay calificaciones
- Instrumentos ÓpticosDocumento5 páginasInstrumentos ÓpticosJames hawlettAún no hay calificaciones
- Ruido de JohnsonDocumento5 páginasRuido de Johnsonelisa055Aún no hay calificaciones
- Laboratorio #1 Disipador de EnergíaDocumento14 páginasLaboratorio #1 Disipador de EnergíaElkin Fabian TrujilloAún no hay calificaciones
- CASTILLA LA MANCHA Reserva A 2010 PDFDocumento2 páginasCASTILLA LA MANCHA Reserva A 2010 PDFPianistasenderistaAún no hay calificaciones
- Reglas de Kirchoff PDFDocumento22 páginasReglas de Kirchoff PDFjairoAún no hay calificaciones
- Ablandamiento de LA MADERADocumento9 páginasAblandamiento de LA MADERAJosue Marlo MontenegroAún no hay calificaciones
- Puente HDocumento4 páginasPuente HChristian Alfredo Acevedo HerreraAún no hay calificaciones
- Magistral #1 Movimiento Rectilíneo Acelerado PDFDocumento21 páginasMagistral #1 Movimiento Rectilíneo Acelerado PDFPapelero Jack100% (1)
- Practica 4Documento6 páginasPractica 4708170Aún no hay calificaciones
- SESIÓN de APRENDIZAJE Conociendo Los PlanetasDocumento2 páginasSESIÓN de APRENDIZAJE Conociendo Los PlanetasVane Ramos84% (31)
- Guia 5 Ensayo de Dureza RockwellDocumento8 páginasGuia 5 Ensayo de Dureza RockwellArnol CallataAún no hay calificaciones
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadDe EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Mecánica cuántica para principiantesDe EverandMecánica cuántica para principiantesCalificación: 3.5 de 5 estrellas3.5/5 (5)