También podría gustarte
- Test Tema 1 Envolventes y Cuadros EléctricosDocumento4 páginasTest Tema 1 Envolventes y Cuadros EléctricosRoberto ArrizabalagaAún no hay calificaciones
- BOPSDocumento23 páginasBOPSLuisGerardoGarciaIduarteAún no hay calificaciones
- Saitta, C. - Trampolines MusicalesDocumento109 páginasSaitta, C. - Trampolines MusicalesHernan Here100% (1)
- EqUIPO de BOMBEO en Un Edificio MultifamiliarDocumento36 páginasEqUIPO de BOMBEO en Un Edificio MultifamiliarEnzo Morales50% (2)
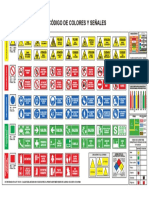
- Codigo de ColoresDocumento1 páginaCodigo de ColoresRoger ReyesAún no hay calificaciones
- Distribucion de FrecuenciasDocumento52 páginasDistribucion de FrecuenciasKevinCortézAún no hay calificaciones
- Manual de Mantenimiento Mercedes Benz Motor 617.95Documento27 páginasManual de Mantenimiento Mercedes Benz Motor 617.95JoséEnriqueSosaAún no hay calificaciones
- Condiciones y Usos de Las TicDocumento5 páginasCondiciones y Usos de Las TicFlor GrandeAún no hay calificaciones
- No 3 DencidadDocumento13 páginasNo 3 DencidadCecilia Raquel Cordova RiscoAún no hay calificaciones
- Cartas de Navegación Aeronáutica - Wikipedia, La Enciclopedia LibreDocumento37 páginasCartas de Navegación Aeronáutica - Wikipedia, La Enciclopedia LibreWilliam Jaldin CorralesAún no hay calificaciones
- Taller Unidad 3 SENA SOFIADocumento3 páginasTaller Unidad 3 SENA SOFIAYaibeth SuñigaAún no hay calificaciones
- Configurar Un TX y RX AuroraDocumento14 páginasConfigurar Un TX y RX AuroraAndresEduardoCortesAún no hay calificaciones
- BombasDocumento16 páginasBombasEliseo MartinezAún no hay calificaciones
- MULTITESTERDocumento16 páginasMULTITESTERAngel Justino Guevara AcostaAún no hay calificaciones
- Evidencia 1 FinalDocumento6 páginasEvidencia 1 FinalGael ZamoraAún no hay calificaciones
- Bitacora de Mantenimiento .Documento1 páginaBitacora de Mantenimiento .Enrique ValleAún no hay calificaciones
- COVENIN 1022-97 Malla de Alambres Acero Electrosoldados PDFDocumento13 páginasCOVENIN 1022-97 Malla de Alambres Acero Electrosoldados PDFMiguel SambranoAún no hay calificaciones
- ZepedaRodriguez Marleth M20S1 ContaminacionquimicadelaguaDocumento6 páginasZepedaRodriguez Marleth M20S1 ContaminacionquimicadelaguaHector Armando Hernandez Dominguez100% (1)
- Memoria VisualDocumento2 páginasMemoria VisualneptalgAún no hay calificaciones
- CocoDocumento1 páginaCocoJuan CarlosAún no hay calificaciones
- Masbeli-Calletano-Unidad 3. Actividad 3. Registro Del Consumo de Los InventariosDocumento1 páginaMasbeli-Calletano-Unidad 3. Actividad 3. Registro Del Consumo de Los InventariosMasbeli100% (2)
- INOXPADocumento20 páginasINOXPAnefrain muchoAún no hay calificaciones
- Fotovoltaica en Red y El Cascabel Del GatoDocumento0 páginasFotovoltaica en Red y El Cascabel Del GatoIulian IoanAún no hay calificaciones
- 3 Actividad 3 Auditoria de SistemasDocumento5 páginas3 Actividad 3 Auditoria de SistemasandresAún no hay calificaciones
- JUAN - AGUILAR - SP-SCOE-1602-B1 - 001 - U3. Evidencia de Aprendizaje - La Lectura y Escritura Como Proceso de ConocimientoDocumento5 páginasJUAN - AGUILAR - SP-SCOE-1602-B1 - 001 - U3. Evidencia de Aprendizaje - La Lectura y Escritura Como Proceso de ConocimientoCharly AguilarAún no hay calificaciones
- I.E.Mix "Uriel Garcia": Sesion de AprendizajeDocumento2 páginasI.E.Mix "Uriel Garcia": Sesion de Aprendizajevladimir s0% (1)
- Videoactivismo y Movimientos Sociales. Teoría y Praxis de Las Multitudes ConectadasDocumento3 páginasVideoactivismo y Movimientos Sociales. Teoría y Praxis de Las Multitudes ConectadasAlexis PalominoAún no hay calificaciones
- El NavtexDocumento6 páginasEl NavtexAndri ColinaAún no hay calificaciones
- Borrador 3 - La Importancia de La Pedagogía en La Sociedad y en La EducaciónDocumento7 páginasBorrador 3 - La Importancia de La Pedagogía en La Sociedad y en La EducaciónZuri Grande100% (1)
- Planificación Docente de Asignatura para Una Formación Basada en Competencias ProfesionalesDocumento89 páginasPlanificación Docente de Asignatura para Una Formación Basada en Competencias ProfesionalesWilbert Rivera Muñoz100% (5)