También podría gustarte
- Aporte Camilo MorosDocumento15 páginasAporte Camilo MorosJhon Alexander Calderon OrtizAún no hay calificaciones
- Contenido Lección TELEMATICADocumento126 páginasContenido Lección TELEMATICAJhon Alexander Calderon OrtizAún no hay calificaciones
- Aporte Cesar RamirezDocumento8 páginasAporte Cesar RamirezJhon Alexander Calderon OrtizAún no hay calificaciones
- 2.1.4.8 SmartLab Claudia NavasDocumento11 páginas2.1.4.8 SmartLab Claudia NavasJhon Alexander Calderon OrtizAún no hay calificaciones
- Antecedentes Del SGSSSDocumento14 páginasAntecedentes Del SGSSSJhon Alexander Calderon OrtizAún no hay calificaciones
- Syllabus Curso ArquitecturaPCDocumento14 páginasSyllabus Curso ArquitecturaPCJhon Alexander Calderon OrtizAún no hay calificaciones
- Nuevo Pensum Ingenieria Electronica PDFDocumento3 páginasNuevo Pensum Ingenieria Electronica PDFmariop1982Aún no hay calificaciones
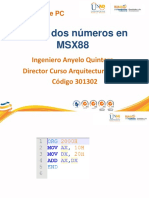
- Anexo 1. Suma de Dos Numeros en MSX88 PDFDocumento9 páginasAnexo 1. Suma de Dos Numeros en MSX88 PDFJhon Alexander Calderon OrtizAún no hay calificaciones
- Web Conferencia 4 Control Digital Paso 3 Fecha 23-11-2018Documento21 páginasWeb Conferencia 4 Control Digital Paso 3 Fecha 23-11-2018Jhon Alexander Calderon OrtizAún no hay calificaciones
- Malla Ingenieria Electronica Unad Plan AntiguoDocumento3 páginasMalla Ingenieria Electronica Unad Plan AntiguoPeky GiulianaAún no hay calificaciones
- Plan de Equivalencias PDFDocumento18 páginasPlan de Equivalencias PDFJhon Alexander Calderon OrtizAún no hay calificaciones
- Derivadas e Integrales-UniDocumento20 páginasDerivadas e Integrales-Unikiensoy123Aún no hay calificaciones
- Episodios de Dragon Ball (Completos)Documento10 páginasEpisodios de Dragon Ball (Completos)Jhon Alexander Calderon OrtizAún no hay calificaciones
- Protocolo para La Profilaxis de La Transmisión Vertical Del Vih en ObstetriciaDocumento16 páginasProtocolo para La Profilaxis de La Transmisión Vertical Del Vih en ObstetriciaJhon Alexander Calderon OrtizAún no hay calificaciones
- Leccion Evaluativa No. 2 2013IIDocumento8 páginasLeccion Evaluativa No. 2 2013IIJhon Alexander Calderon OrtizAún no hay calificaciones
- The Native Speaker Offer (Spanish)Documento2 páginasThe Native Speaker Offer (Spanish)Jhon Alexander Calderon OrtizAún no hay calificaciones
- Leccion Evaluativa No. 2 2013IIDocumento8 páginasLeccion Evaluativa No. 2 2013IIJhon Alexander Calderon OrtizAún no hay calificaciones
- Calculadora para PrestamosDocumento1 páginaCalculadora para PrestamosKriss CGAún no hay calificaciones
- Circuitos IntegradosDocumento1 páginaCircuitos IntegradosJhon Alexander Calderon OrtizAún no hay calificaciones
- Tarea de ReconocimientoDocumento2 páginasTarea de ReconocimientoJhon Alexander Calderon OrtizAún no hay calificaciones
- Compilador C Ccs Y Simulador Proteus para Microcontroladores Pic PDFDocumento270 páginasCompilador C Ccs Y Simulador Proteus para Microcontroladores Pic PDFherreraherrerarubenAún no hay calificaciones
- Practica 1 LaboratorioDocumento3 páginasPractica 1 Laboratorioyamileth hinojosaAún no hay calificaciones
- Perforacion No ConvencionalDocumento13 páginasPerforacion No ConvencionalAlejandro GilAún no hay calificaciones
- Manual de Control de Pozos SLBDocumento319 páginasManual de Control de Pozos SLBJose Martinez100% (1)
- Administ Arc I OnDocumento5 páginasAdminist Arc I OnLinford Kits Porta ChAún no hay calificaciones
- Catálogo AustromexDocumento258 páginasCatálogo AustromexJOSE LUISAún no hay calificaciones
- Manual Operador DobladoraDocumento35 páginasManual Operador DobladoraAdemar VTAún no hay calificaciones
- Interactividad y MultimedialidadDocumento3 páginasInteractividad y MultimedialidadSammy Pérez JAún no hay calificaciones
- 01 04 ArquitecturasDocumento48 páginas01 04 ArquitecturasTheGaMer ROTAún no hay calificaciones
- Humedal 3 PuentesDocumento123 páginasHumedal 3 PuenteslalmonacidaAún no hay calificaciones
- Semin BE5Documento2 páginasSemin BE5Dina ISMAEL BARDÁNAún no hay calificaciones
- Procvedimiento Interno ATS, PETARDocumento3 páginasProcvedimiento Interno ATS, PETARgenaro cruzAún no hay calificaciones
- Informetim 01Documento3 páginasInformetim 01JAKELINEAún no hay calificaciones
- Presentacio Ün Curso Taller Upaep Evaluacio Ün 3Documento55 páginasPresentacio Ün Curso Taller Upaep Evaluacio Ün 3Jetzahel Lucas JAún no hay calificaciones
- Francisco Puy - El Nominalismo Primera Crisis de La CristiandadDocumento22 páginasFrancisco Puy - El Nominalismo Primera Crisis de La CristiandadOscar BaezAún no hay calificaciones
- Estructura ArancelariaDocumento3 páginasEstructura ArancelariaJesus Hernandez De La CruzAún no hay calificaciones
- Davis, Flora - La Comunicación No VerbalDocumento127 páginasDavis, Flora - La Comunicación No VerbalMonTse LuNa17% (6)
- Manual Encimeras TekaDocumento35 páginasManual Encimeras TekaPedro Ruiz GomezAún no hay calificaciones
- Metodos para El Analisis EconomicoDocumento3 páginasMetodos para El Analisis EconomicoBalmore LópezAún no hay calificaciones
- COMUNICACIÓNDocumento14 páginasCOMUNICACIÓNiracema moralesAún no hay calificaciones
- Formato Ficha-Tecnica Codi-Proyecto 2011 Gobierno y Asuntos PublicosDocumento20 páginasFormato Ficha-Tecnica Codi-Proyecto 2011 Gobierno y Asuntos PublicosCarlos David Lopez NoriegaAún no hay calificaciones
- Diapositivas EmprendimientoDocumento17 páginasDiapositivas EmprendimientoSilvana ManchayAún no hay calificaciones
- FUNDAMENTOS DE ECONOMIA EnsayoDocumento5 páginasFUNDAMENTOS DE ECONOMIA EnsayomonicaAún no hay calificaciones
- Roles Del Departamento de Diseño-1Documento14 páginasRoles Del Departamento de Diseño-1Angie Tovar100% (1)
- El Poder de Las AfirmacionesDocumento230 páginasEl Poder de Las Afirmacionesbeto13montalvo100% (20)
- Marketing CruzadoDocumento14 páginasMarketing CruzadoStarlin CruzAún no hay calificaciones
- Evaluacion Iso 9001Documento6 páginasEvaluacion Iso 9001Leidy Carolina Ibarra BastidasAún no hay calificaciones
- Ensayo Persuadir y ArgumentarDocumento2 páginasEnsayo Persuadir y ArgumentarAlba Heredia PendonAún no hay calificaciones
- Interruptores Automaticos para Servicio Interior - ABBDocumento29 páginasInterruptores Automaticos para Servicio Interior - ABBManuel100% (2)
- 2.2 Identificación de Los Componentes y Medios de Transmisión Del Reglamento Técnico para Redes Internas de TelecomunicacionesDocumento4 páginas2.2 Identificación de Los Componentes y Medios de Transmisión Del Reglamento Técnico para Redes Internas de TelecomunicacionesManuel Perez100% (3)
- Trabajo CompletoDocumento5 páginasTrabajo CompletoJohana CatañoAún no hay calificaciones
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- La causa raiz de los accidentes: Historias de accidentes en la industriaDe EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaCalificación: 5 de 5 estrellas5/5 (1)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosDe EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosCalificación: 4 de 5 estrellas4/5 (1)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Comunicaciones industriales y WinCCDe EverandComunicaciones industriales y WinCCCalificación: 5 de 5 estrellas5/5 (4)
- El dilema humano: Del Homo sapiens al Homo techDe EverandEl dilema humano: Del Homo sapiens al Homo techCalificación: 4 de 5 estrellas4/5 (1)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Ingeniería de Sonido. Conceptos, fundamentos y casos prácticos: CINE, TELEVISIÓN Y RADIODe EverandIngeniería de Sonido. Conceptos, fundamentos y casos prácticos: CINE, TELEVISIÓN Y RADIOCalificación: 4.5 de 5 estrellas4.5/5 (8)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)