Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Act2 Gutierrez Franyer Martes
Cargado por
Franyer GutierrezDerechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Act2 Gutierrez Franyer Martes
Cargado por
Franyer GutierrezCopyright:
Formatos disponibles
REPBLICA BOLIVARIANA DE VENEZUELA LA UNIVERSIDAD DEL ZULIA ESCUELA DE INGENIERA GEODSICA DEPARTAMENTO DE GEODESIA SUPERIOR CTEDRA: GEODESIA MARINA
PRO: MANAURE BARRIOS
REALIZADO POR: FRANYER, GUTIERREZ C.I 22.109.083
Maracaibo, Abril 2013
ESQUEMA SISTEMA DE POSICIONAMIENTO DE LA SUPERFICIE DEL MAR: POSICIONAMIENTO DE LA EMBARCACIN POSICIONAMIENTO DE LAS FUENTES SSMICAS POSICIONAMIENTO DE LOS RECEPTORES SISTEMA DE POSICIONAMIENTO ACUSTICO SUBMARINO SISTEMA DE POSICIONAMIENTO ACSTICO DE LNEA DE BASE LARGA (LBL): SISTEMA DE POSICIONAMIENTO ACSTICO DE LNEA DE BASE CORTA (SBL): SISTEMA DE POSICIONAMIENTO ACSTICO DE LNEA DE BASE ULTRA CORTA (USBL): SISTEMAS DE MAPEO ACSTICO SUBMARINO: SONAR DE HAZ SIMPLE: SONAR MULTIHAZ: SONDAS LATERALES O SIDE SCAM SONAR: INTEGRACIN DE LOS SISTEMAS DE POSICIONAMIENTO: CONCLUSIN RECOMENDACIONES BIBLIOGRAFA
INTRODUCCIN
La acstica submarina ha previsto al hombre del inters por desarrollar medios para estudiar las profundidades del fondo marino a travs del sonido que se propaga dentro de los mares, ocanos, etc. Mediante diversas tcnicas que emplea la acstica marina es posible la representacin del fondo marino, permitiendo cumplir con unos de los objetivos principales de la Geodesia; de la misma forma se logra mejores aproximaciones al geoide marino. El sonar puede usarse como medio de localizacin acstica, funcionando de forma similar al radar, con la diferencia de que en lugar de emitir seales de radioelectrnica se emplean impulsos sonoros. Es este principio el que define la acstica submarina, la cual est siendo muy utilizada para cartografiar y representar el fondo ocenico sin ocasionar ninguna clase de daos a la fauna submarina. En este trabajo se desarrollara los distintos sistemas de posicionamiento y cartografa de la superficie y del fondo marino, la importancia que tiene la implementacin de diferentes sistemas y la unin de los mismos.
DESARROLLO
SISTEMA DE POSICIONAMIENTO DE LA SUPERFICIE DEL MAR: El objetivo del posicionamiento marino es determinar las posiciones de puntos desconocidos de manera rpida y precisa, especficamente, las posiciones que se determinan son: la posicin de la embarcacin, los centros de la fuente (caones) y receptores en el cable (hidrfonos). La tendencia actual es el desarrollo de tcnicas que permitan un posicionamiento ms exacto en menor tiempo, y con menor esfuerzo, esto se traduce en ahorro de tiempo y dinero, sin embargo, es importante tener en cuenta que la exactitud obtenida depende en gran parte del instrumental a utilizar y de la habilidad de los operadores, entre otras cosas. POSICIONAMIENTO DE LA EMBARCACIN Las tcnicas empleadas para el posicionamiento ya sea bidimensional o tridimensional de la embarcacin, utilizan estaciones de referencia en tierra cuyas coordenadas son conocidas, a partir de estas coordenadas se deriva posicin de la estacin mvil o rover (embarcacin); en ambas se colocan los equipos receptores y/o emisores de acuerdo al mtodo de posicionamiento a utilizar. Los mtodos de posicionamiento para embarcaciones ms utilizados son los siguientes: Mtodos pticos, Mtodos Electrnicos o Radioposicionamiento y los Mtodos Satelitales (GPS). Cualquiera sea el mtodo de posicionamiento que se utilice, previo al posicionamiento debe fijarse un control geodsico horizontal en el litoral o costa. Los lugares ideales para ubicar las estaciones de control geodsico, son las pennsulas o reas abiertas que permitan visuales sin obstrucciones hacia las embarcaciones, estructuras, plataformas, etc. Las coordenadas de los puntos de control pueden fijarse trazando poligonales y tambin por triangulaciones o trilateraciones; se recomienda vincular los puntos de control costeros con puntos pertenecientes a la Red Geodsica Nacional para mantener la exactitud de los mismos y lograr un posicionamiento con mayor exactitud y precisin, a la vez estn referidos al mismo sistema de control geodsico terrestre y se establece de esta manera una homogeneidad en lo que respecta a sistemas de referencia y datum de las mediciones a realizar. Para determinar la deriva de la embarcacin se utiliza el Girscopo, tambin conocido como girocomps, tambin permite determinar la posicin de la unidad de transmisin acstica, la posicin de la fuente de energa (encargada de medir la profundidad) y los offset relativos al punto de referencia del barco VRP. Tambin se usa como dato de entrada del movimiento del barco dentro del estimador y para proveer un rumbo de referencia. En el caso de los mtodos pticos, estos permiten determinar la posicin horizontal de la embarcacin partiendo de mediciones de direcciones, ngulos, acimutes, distancias y diferencia de distancias. Entre los principales mtodos de posicionamiento ptico tenemos: El Mtodo de Interseccin Directa, El Mtodo Polar y el Mtodo de Interseccin Inversa. Para las mediciones de ngulos y acimutes, se pueden emplear sextantes, octantes, telmetros, teodolitos, estaciones totales, entre otros. Los mtodos pticos solo pueden ser utilizados para posicionar la embarcacin en reas costeras (levantamientos ssmicos costaneros) ya que estos tienen el inconveniente de que la densidad de puntos de medicin que se obtiene no puede ser muy alta, es decir, la embarcacin se puede posicionar aproximadamente cada 30 y esto solamente si se cuenta con personal con mucha practica para seguir la embarcacin, medir los ngulos rpidamente y apuntarles. Otro inconveniente consiste en que, en reas de estudio muy extensa, solo se pueden cubrir franjas de agua de mximo 3 kilmetros y esto en casos excepcionales de muy buena visibilidad y oleaje no muy severo.
Para el posicionamiento en los levantamientos ssmicos en aguas someras y profundas, los mtodos ms utilizados son el radioposicionamiento y los mtodos satelitales. El Posicionamiento Electrnico o Radioposicionamiento, permite posicionar las embarcaciones en cualquier instante y bajo cualquier circunstancia atmosfrica, con una precisin tal permite mantener un margen de seguridad para evitar peligros. Hoy en da, el mtodo de posicionamiento ms utilizado en los levantamientos ssmicos marinos (costaneros, someros y en aguas profundas) es el satelital, especficamente se utiliza la tcnica GPS, debido a la gran cantidad de beneficios que esta tcnica proporciona, al ofrecer un posicionamiento ms rpido y exacto. Para el posicionamiento marino no puede utilizarse la misma metodologa de medicin GPS utilizada en tierra, ya que en trabajos en el mar la seal GPS se ve ms afectada por el multipath, en este caso el posicionamiento se puede realizar con metodologa GPS Diferencial (DGPS) o GPS en tiempo real (RTK). Ambas metodologas requieren de una estacin base con coordenadas conocidas y vinculadas a un vrtice de la red geodsica de primer orden (en el caso de Venezuela dicha red es REGVEN), mientras uno ms equipos se desplacen al rea de estudio. Los receptores mviles registraran la informacin de los satlites simultneamente al receptor base. El DGPS es un sistema desarrollado por los fabricantes de receptores civiles que permite obtener una precisin similar al sistema GPS militar, esto se logra acoplando al receptor GPS otro tipo de receptor, el cual capta las seales emitidas por una red de radiobalizas situadas en estaciones costeras. El mtodo de posicionamiento GPS Diferencias, consiste en determinar las coordenadas de un receptor en movimiento (mvil), a partir de otro, instalado en un vrtice con coordenadas conocidas (base). El periodo de observacin deber tener tiempos comunes para toda la medicin, y es esencial que desde el comienzo hasta el trmino, ambos receptores realicen registros continuos de un mnimo de cuatro satlites. Los datos procesados sern de exactitud sub-mtrica con respecto a los obtenidos con el mtodo anterior. Se usa al menos una estacin base con coordenadas conocidas y tantos mviles como se requieran, conociendo las coordenadas de la estacin maestra o base y calculando su posicin con GPS, es posible conocer la magnitud del error presente en la posicin por el sistema en un momento dado, luego la estacin maestra enva datos de correccin o correcciones a las estaciones remotas, dichas correcciones se determinan a partir de la diferencia entre la distancia calculada y la medida que existe entre la estacin maestra y cada uno de los satlites observados. Esta correccin es enviada a las estaciones remotas mediante un enlace comunicativo, basado en el formato RTCM-104 (Comisin Radio Tcnica para Servicios Martimos) u otro, que es un formato diseado para la transmisin de las correcciones diferenciales.
Posicionamiento Diferencial GPS.
Los tiempos de medicin sern, en general, el posicionamiento de la embarcacin se realizara cada 15, con una cantidad mnima de satlites (4 como mnimo), el intervalo de grabacin y distancias de la estacin base se establecern de acuerdo con las especificaciones tcnicas del equipo que se utilice. Lo importante e ineludible para el operador en este aspecto, es no degradar la precisin de las mediciones por error en la seleccin de algunos de estos parmetros. El mtodo Diferencial GPS en Tiempo Real (RTK), es un posicionamiento relativo, que utiliza al menos una estacin maestra y varias estaciones remotas, con la finalidad de mejorar la exactitud en posicin y reducir los errores presentes en las mediciones GPS. Las tcnicas de procesado cinemtico en tiempo real (RTK) obtienen una precisin de 10cm con un receptor remoto mvil. Este tipo de posicionamiento se recomienda dependiendo de la exactitud deseada y de la extensin del rea de estudio ya que si la extensin supera los 10km por motivos de productividad el RTK sera muy costoso y utilizarlo.
POSICIONAMIENTO DE LAS FUENTES SSMICAS Las posiciones que se determinan en el caso de las fuentes son los centros de las fuentes (caones), para ello se utiliza el mtodo de posicionamiento satelital GOS. En general, las posiciones del centro de la fuente son determinadas a partir de un punto de referencia ubicado en el barco, tambin conocido como el Vessels Reference Point o VRP, generalmente este punto es la antena de medicin GPS.
POSICIONAMIENTO DE LOS RECEPTORES La posicin del barco y el equipo grabador de la seal debe ser muy cuidadosamente controlado para asegurar las caractersticas geolgicas que pueden ser determinadas con precisin. Los barcos ssmicos modernos portan sistemas avanzados de navegacin y acstica que permiten determinar con gran precisin la posicin del mismo. Cada streamer puede tener ms de 6000m de largo (3,2 millas) y con profundidad de 6 a 12m (20 a 40 pies) por debajo de la superficie para reducir el efecto de las olas. Modernos streamer portan receptores GPS para establecer con mayor precisin la posicin del mismo y del barco en relacin a la superficie de la tierra. Tcnicamente en los levantamientos ssmicos ms avanzados, son utilizados ms de 8 streamers al mismo tiempo, con una separacin entre cada uno de ellos de 50 a 120m (180 a 400 pies).
Las mediciones a travs de Sistemas de Posicionamiento Global (GPS, por sus siglas en ingles) utilizan satlites para detectar y apuntar la posicin de las embarcaciones con una resolucin de tres metros. Con los sistemas tradicionales, las posiciones de las fuentes y los receptores en relacin con la embarcacin se calculan utilizando informacin enviada por sensores acsticos y sensores de cabecera montados en las redes de cables ssmicos, al comienzo y al final de cada cable. Las posiciones delantera y trasera de los cables ssmicos se conocen con precisin. Los rangos acsticos se usan como informacin de entrada para un ajuste de los rangos de la red que se extiende entre lecturas del GPS. El resultado es una precisin absoluta de posicionamiento dentro de los 4m (13pies) en cualquier punto a lo largo de los cables ssmicos. SISTEMA DE POSICIONAMIENTO ACUSTICO SUBMARINO Un sistema de posicionamiento hidroacstica consta de un transmisor (transductor) y un receptor (transponder). Una seal (pulso) se enva desde el transductor, y se dirige hacia el transpondedor de los fondos marinos. Este pulso se activa el transponder, que responde inmediatamente al transductor buque. El transductor, con la electrnica correspondiente, calcula la posicin exacta del transpondedor en relacin con el buque. Los sistemas de navegacin y el posicionamiento bajo el agua utilizan tres principios diferentes para las mediciones y clculos los cuales se caracterizan por la longitud de sus lneas bases:
SSBL <10cm SBL.. 20-50m LBL.. 100- +6000m Para la transmisin como para la recepcin de las seales acsticas transmitidas en el agua, los transductores submarinos electroacstica son esenciales: que llevan a cabo (como en los micrfonos y los altavoces de aire) la conversin de la energa elctrica en energa acstica, o viceversa. La Tecnologa ms utilizada para transductores bajo el agua se llama Tonpilz: una pila de lminas de material piezoelctrico es polarizada por una alta presin esttica impuesta por una barra de tensin, la pila est sujeta a un techo (se contrarresta con una contra masa en el otro extremo), que transmitido al agua la vibracin inducida por la aplicacin de un campo elctrico a travs de la columna de excitacin piezoelctrica. Totalmente de resonancia, estos sistemas permiten un alto nivel de emisiones, pero slo permiten el ancho de banda bajo. Sistemas de posicionamiento acstico puede dar una precisin de unos pocos centmetros hasta decenas de metros y se puede utilizar con la distancia que operan desde varios metros hasta decenas de kilmetros. El rendimiento depende en gran medida del tipo y modelo del sistema de posicionamiento, su configuracin para un trabajo concreto, y las caractersticas del entorno acstico bajo el agua en el lugar de trabajo.
SISTEMA DE POSICIONAMIENTO ACSTICO DE LNEA DE BASE LARGA (LBL): Es una de las tres grandes clases de sistemas de localizacin acstica submarina que se utilizan para rastrear vehculos subacuticos y buzos. La tcnica LBL resulta muy importante debido a que ofrece alta precisin de posicionamiento y estabilidad en la posicin que es independiente de la profundidad del agua. Los
sistemas LBL se emplean generalmente para el estudio de trabajo bajo el agua donde la precisin o exactitud de la posicin o estabilidad de los buques (SBL, USBL) no es suficiente. Los sistemas de Long Base line determinan la posicin de un vehculo o buceador acsticamente mediante la medicin de la distancia de un interrogador del vehculo o buzo a tres o ms transpondedores de referencia desplegado en el fondo marino. Estas medidas de rango, que a menudo se complementan con los datos de profundidad de los sensores de presin en los dispositivos, se utilizan para triangular la posicin del vehculo o buzo. Los sistemas de lnea de base larga toman su nombre del hecho de que el espaciamiento de los transpondedores de referencia es largo o similar a la distancia entre el buzo o un vehculo y los transpondedores. Esto es, los transpondedores de base se montan tpicamente en los vrtices de un submarino lugar de trabajo en el que el vehculo o buzo opera. En este mtodo se obtiene una geometra ideal para la colocacin, en el que cualquier error que aparece en las mediciones de rango acstico puede producir slo un error de posicin equivalente. Ventajas
Posicin de muy buena precisin la cual es independiente de la profundidad del agua. Observaciones con redundancia. Desventajas
Conjunto de equipos costosos. Los sistemas convencionales requieren una calibracin completa en cada despliegue. SISTEMA DE POSICIONAMIENTO ACSTICO DE LNEA DE BASE CORTA (SBL): Corto de lnea de base consta de tres o ms transductores sonar individuales que estn conectados por cable a una caja de control central. La exactitud depende de transductor espaciamiento y mtodo de montaje. Los sistemas de SBL no requieren ningn fondo marino montado transpondedores o equipo y por tanto son adecuados para el seguimiento de los objetivos bajo el agua de los barcos o buques a los que estn o anclados o en curso. Los sistemas de posicionamiento acstico de lnea de base corta determinan la posicin de un objetivo a travs de un seguimiento como un ROV midiendo la distancia del objetivo a partir de tres o ms transductores que son, por ejemplo, por el costado del buque de superficie en el cual las operaciones de seguimiento tendr lugar. Estas medidas de rango, que a menudo se complementan con los datos de profundidad de un sensor de presin, se utilizan para triangular la posicin de la meta. La posicin se calcula un seguimiento en tiempo real en la superficie de la hora del arribo (TOAs) de las seales acsticas enviado por el dvico bajo el agua, y adquirida por las boyas. Tal configuracin permiten una rpida y el despliegue de calibracin libres con una precisin similar a los sistemas LBL.
La posicin de los respondedores a bordo de la nave puede ser determinada exactamente durante la instalacin. La direccin de la nave y las mediciones de cabeceo y bandeo tienen que ser hechas durante la operacin y como siempre se requiere un buen conocimiento de la velocidad del sonido.
Ventajas
La baja complejidad del Sistema hace al SBL una herramienta fcil de usar. Buen nivel de precisin con el sistema de vuelo de tiempo. Construido con Redundancia Espacial. Desventajas
El sistema necesita puntos de referencia para obtener una gran precisin en aguas profundas (> 40 m). La estructura requiere calibracin. Requiere una calibracin costa afuera que por lo general no es rigurosamente completada.
SISTEMA DE POSICIONAMIENTO ACSTICO DE LNEA DE BASE ULTRA CORTA (USBL): Es un mtodo de posicionamiento acstico submarino . Un sistema completo USBL consiste en un transmisor-receptor , que se monta en un poste en un barco, y un transpondedor / respuesta sobre el fondo del mar, un domo , o en un ROV . Una computadora, o "unidad de la superestructura", se utiliza para calcular la posicin mediante la medicin de los rangos por el transmisor-receptor. Para calcular una posicin submarina, la USBL calcula tanto una distancia y un ngulo del transmisor-receptor con el faro submarino. Los ngulos se miden por el transmisor-receptor, que contiene una serie de transductores. El jefe del transmisor-receptor contiene normalmente tres o ms transductores separados por una lnea de base de 10 cm o menos. Un mtodo llamado " fase de diferenciacin
"dentro de este arsenal del transductor se utiliza para calcular el ngulo para el transpondedor submarino. Un Pulso acstico es transmitido por el transmisor-receptor y detectado por el transpondedor submarino, que responde con su propio pulso acstico. Este pulso de retorno es detectado por el transmisor-receptor a bordo. El tiempo de la transmisin del pulso acstico inicial hasta que la respuesta es detectado se mide por el sistema USBL y se convierte en un rango. USBL sistemas ofrecen la ventaja de no exigir un fondo marino matriz transponedor. La desventaja es que la precisin de posicionamiento y solidez no es tan buena como para los sistemas LBL. La razn es que el ngulo fijo resuelto por un sistema de USBL se traduce en un margen de error ms grande a mayor distancia. Adems, los mltiples sensores necesarios para la posicin del transductor USBL polo y la indemnizacin de orientacin cada introducir errores adicionales. Por ltimo, la falta de uniformidad de las refracciones entorno acstico submarino seal de causa y reflexiones que tienen un mayor impacto en el posicionamiento USBL que en el caso de la geometra LBL. Ventajas:
nicamente un transceptor solo en la superficie, es decir en uno de los polos. Buen nivel de precisin con sistemas de vuelo en tiempo. Desventajas Requiere un sistema de calibracin detallado, por lo general no completada rigurosamente. La precisin de posicin absoluta depende de sensores adicionales, por ejemplo giroscopios en el buque y una unidad de referencia vertical.
SISTEMAS DE MAPEO ACSTICO SUBMARINO: SONAR DE HAZ SIMPLE: Sensores de sonar de haz simple de utilizar sonar (el sonido y de navegacin que van) la tecnologa para recopilar las mediciones del fondo del mar. Estos sensores recogen punto o mapa de bits de datos derivados de la fuerza y el momento de la devolucin acstico. Sensores de haz nico compuesto por un transductor, montado sobre o remolcado por un barco, que se alimenta en un procesador de seales y dispositivo de visualizacin. En la columna de agua a intervalos especficos directamente debajo del transductor. La onda de sonido rebota en el fondo del mar y el retorno es capturado por el transductor. Emiten en una sola frecuencia, tpicamente 200 KHz, por encima del sonido audible por el ser humano (ultrasnicas). En trabajos de cartografa ya no se emplean, pero por su facilidad de manejo y fiabilidad hasta los 1000 metros se emplean aun en localizacin de bancos de peces por ejemplo. Los datos de sonar de haz se estn utilizando para trabajos como: La gestin de una planta acutica Molestias Cartografa de Pasado y Presente arrecifes de ostras Cartografa Geolgica del fondo marino
Data Sets Verificacin de campo Otros conjuntos de datos obtenidos por teledeteccin Navegacin (Bsqueda de profundidad)
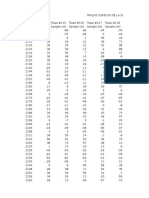
SONAR MULTIHAZ: Se trata de un conjunto de sondas que emiten en varias direcciones a una determinada frecuencia, cubriendo as una mayor zona y posibilitando la correccin de errores mediante la interpolacin de los resultados obtenidos. A dems de precisin se gana rapidez y por tanto un ahorro significativo en el gasto que supone cartografiar una zona.
La siguiente tabla muestra las caractersticas tpicas de las sondas multihaz: Frecuencia de muestreo Profundidad de muestreo (z) Longitud de cobertura Apertura de haz Numero de haces Resolucion por pixel Velocidad mximo de adquisicion 13 KHz De 50 a 11000 m de 5 a7 veces la altura de agua 150 162 2,4 m 10 nudos de 2 a 20 segundos 1:100 000 1:500 000
Frecuencia de adquisicion Escala de trabajo
Estos sistemas son ampliamente utilizados para los levantamientos hidrogrficos de aguas poco profundas en apoyo de la cartografa de navegacin. Ecosondas multihaz tambin son comnmente utilizadas para la investigacin geolgica y oceanogrfica, y desde la dcada de 1990 para el petrleo y la exploracin de gas y el fondo marino enrutamiento de cables. SONDAS LATERALES O SIDE SCAM SONAR: Las sondas laterales son, quizs, los dispositivos ms verstiles para la realizacin de batimetras en un amplio rango de profundidades y resoluciones. La mayora de las sondas laterales van montadas en dispositivos sumergibles que son arrastrados por un barco, evitando en gran medida la problemtica asociada al movimiento de la nave. Este tipo de dispositivos sumergibles se denomina deep tow. En muchos casos, a la vez que la sonda lateral, incorpora numerosos sensores para medir las propiedades del agua, y la naturaleza geolgica del terreno. El principio de funcionamiento es muy sencillo: la sonda emite lateralmente ecos en una banda de anchura constante, que se va desplazando con el avance del barco. La emisin de este eco caracteriza las irregularidades del terreno permitiendo crear una batimetra de gran precisin, y escalas de hasta 1:10000 1:5000. Pero
adems, permite el almacenamiento de informacin acerca de la reflectividad del fondo, para su posterior caracterizacin. Puede ser utilizado para llevar a cabo estudios acerca de la arqueologa martima, junto con muestras del fondo marino es capaz de proporcionar una comprensin de las diferencias en el material y tipo de textura del fondo marino. Las imgenes de sonar de barrido lateral son tambin una herramienta de uso general para detectar puntos de escombros y otros obstculos en el fondo marino que pueden ser peligrosos para la navegacin o al fondo del mar las instalaciones de la industria de petrleo y gas. Adems, el estado de los cables y tuberas en el fondo marino pueden ser investigados con sonar de barrido lateral. El Sonar de barrido lateral tambin se utiliza para la investigacin pesquera, las operaciones de dragado y estudios ambientales. Tambin tiene aplicaciones militares, incluyendo la deteccin de minas. INTEGRACIN DE LOS SISTEMAS DE POSICIONAMIENTO: La integracin de sistemas no es ms que la combinacin o fusin de los sistemas de posicionamiento en la superficie del mar, s sistemas de posicionamiento acstico submarino y los sistemas de mapeo acstico submarino utilizado en diversas aplicaciones. Es importante en la navegacin martima para el oficial del barco para conocer la posicin del buque cuando est en mar abierto y en los puertos congestionados y vas fluviales. Si bien en el mar, la posicin exacta, velocidad y rumbo son necesarios para garantizar el buque llegue a su destino de la manera ms segura, ms econmica y oportuna que las condiciones lo permitan. La necesidad de informacin precisa de la posicin se vuelve an ms crtico que el buque salga de o llegue a puerto. Trfico de buques y otros peligros de navegacin haga maniobra ms difcil, y el riesgo de accidentes es mayor.
CONCLUSIN La Geodesia Marina, como rea de la geodesia encargada del estudio y representacin de la parte cubierta por los ocanos, se basa en la acstica submarina para llevar a cabo muchos de sus procedimientos y actividades de campo. De las distintas formas de radiacin conocidas, la que mejor se propaga a travs del mar es el sonido. Una de las primeras referencias histricas a la propagacin del sonido en el mar y su deteccin se debe a Leonardo Da Vinci, quien en 1590 escriba:Si detienes tu barco e introduces el extremo de un tubo largo en el agua y aplicas tu odo al extremo exterior, oirs barcos que se encuentran a una gran distancia de ti. El sonido consiste en un movimiento regular de las molculas de un medio elstico, en nuestro caso el agua del mar, que se transmite en forma de onda. Cuando la onda alcanza un rea determinada hace que se perturbe el equilibrio de sus partculas moleculares. Esta perturbacin se denomina presin y es medible mediante un hidrfono sensible a la presin. La tecnologa sonar, o de ultrasonido, se han desarrollado la oceanografa acstica, el estudio de las caractersticas de los ocanos utilizando diferentes medios acsticos, y la tomografa acstica, una tcnica de representacin de imgenes o teledeteccin mediante anlisis informtico para el estudio de los datos recopilados cuando las seales acsticas atraviesan un objeto. Los diferentes tipos de sonar utilizados para mapear o cartografiar el fondo marino tienen sus ventajas en comparacin con otros sistemas, ya que al tratarse de sensores, no necesitan estar en contacto directo con el rea de estudio.
RECOMENDACIONES Profundizar los temas para adquirir mayor conocimiento en el rea de la Geodesia marina. Realizar charla acerca del tema para aportarles ideas, consejo y apoyo a los estudiantes para su mejor formacin. Realizar prcticas de campos para aplicar toda la teora que se desarroll en el tema y as tener mejores experiencias.
BIBLIOGRAFA http://es.wikipedia.org/wiki/Sonar http://www.lpi.tel.uva.es/~nacho/docencia/ing_ond_1/trabajos_06_07/i o7/public_html/bat3.html http://www.rcinternational.com.ar/new/electronicamarina/productos_investigacion_h.php?categoria=Ecosondas%20Mono% 20Haz%20(Single%20Beam) Trabajo de Ssmica de Reflexin Marina. Ctedra Geofsica Aplicada VI Semestre http://en.wikipedia.org/wiki/Multibeam_echosounder http://en.wikipedia.org/wiki/Side-scan_sonar http://www.lpi.tel.uva.es/~nacho/docencia/ing_ond_1/trabajos_06_07/i o7/public_html/sonar1.html
También podría gustarte
- Planilla Enero2015Documento1 páginaPlanilla Enero2015Kelvin RivasAún no hay calificaciones
- Tesis de GradoDocumento131 páginasTesis de GradoFranyer GutierrezAún no hay calificaciones
- Conductismo en La EducacionDocumento4 páginasConductismo en La EducacionFranyer GutierrezAún no hay calificaciones
- Traza Seccion sismicaLISTODocumento607 páginasTraza Seccion sismicaLISTOFranyer GutierrezAún no hay calificaciones
- Nehomar Alcantara Inversion Impedancia AcusticaDocumento76 páginasNehomar Alcantara Inversion Impedancia AcusticaFranyer GutierrezAún no hay calificaciones
- Informe de Pasantias Profesionales Br. Franyer GutierrezDocumento32 páginasInforme de Pasantias Profesionales Br. Franyer GutierrezFranyer GutierrezAún no hay calificaciones
- Pasantías Inf Luis BonillaDocumento21 páginasPasantías Inf Luis BonillaFranyer GutierrezAún no hay calificaciones
- Analisis de Resistividad 2 BuenoDocumento48 páginasAnalisis de Resistividad 2 BuenoFranyer GutierrezAún no hay calificaciones
- Act1 Gutierrez Franyer MartesDocumento44 páginasAct1 Gutierrez Franyer MartesFranyer GutierrezAún no hay calificaciones
- Trabajo InglesDocumento1 páginaTrabajo InglesFranyer GutierrezAún no hay calificaciones
- Municipio Libertador de Caracas ListoDocumento20 páginasMunicipio Libertador de Caracas ListoFranyer GutierrezAún no hay calificaciones
- Informe de Procesamiento, ACTIVIDAD 2Documento35 páginasInforme de Procesamiento, ACTIVIDAD 2Franyer GutierrezAún no hay calificaciones
- Calculos de Aisladores de RPDocumento3 páginasCalculos de Aisladores de RPAnonymous CP69tewAún no hay calificaciones
- Metodologia de Una Lampara de PetDocumento15 páginasMetodologia de Una Lampara de PetJoseAlfredoOrtegaLira100% (1)
- Tipos de TuberiaDocumento6 páginasTipos de TuberiaCarlos VidelaAún no hay calificaciones
- Ensayo de AbrasiónDocumento21 páginasEnsayo de Abrasióncr1st1an_n_sAún no hay calificaciones
- ET Cables de Cobre Concéntrico - Grupo EPM 11 Marzo 2015Documento25 páginasET Cables de Cobre Concéntrico - Grupo EPM 11 Marzo 2015anderson crofortAún no hay calificaciones
- Articulo Mecanica de FluidosDocumento13 páginasArticulo Mecanica de FluidosLuis Fer CaicedoAún no hay calificaciones
- Acido UricoDocumento1 páginaAcido UricoMario Fernando Villota EsparzaAún no hay calificaciones
- Teoria de ColasDocumento11 páginasTeoria de Colasgerln2Aún no hay calificaciones
- Propiedades Fisicas Y Quimicas de Los Elementos de La Tabla PeriodicaDocumento87 páginasPropiedades Fisicas Y Quimicas de Los Elementos de La Tabla PeriodicaJanssen Gomez50% (2)
- Método Politrópico Riguroso (Compresor)Documento12 páginasMétodo Politrópico Riguroso (Compresor)martin eduardo vargas linaresAún no hay calificaciones
- Proyecto Rehabilitacion VialDocumento92 páginasProyecto Rehabilitacion VialMAIRA ORTIZAún no hay calificaciones
- Practica Principiantes de ElectronicaDocumento10 páginasPractica Principiantes de Electronicailam3d100% (1)
- MAT4 U2 S02 Recurso - TIC - 2Documento25 páginasMAT4 U2 S02 Recurso - TIC - 2brayanAún no hay calificaciones
- Taller 7. Propiedades Mecanicas de Metales IDocumento4 páginasTaller 7. Propiedades Mecanicas de Metales IEnder RealesAún no hay calificaciones
- DPQ - Diagramas de ProcesosC2Documento61 páginasDPQ - Diagramas de ProcesosC2Carlos Mendoza BarbozaAún no hay calificaciones
- Distribuciones MuestralesDocumento25 páginasDistribuciones MuestralesLouis MugiwaraAún no hay calificaciones
- MatricesDocumento30 páginasMatricesAarmendar MendozaAún no hay calificaciones
- Qué Es Un Relé y para Que SirveDocumento1 páginaQué Es Un Relé y para Que SirveSandino JoseAún no hay calificaciones
- VI Reacciones Heterogéneas No CatalíticasDocumento57 páginasVI Reacciones Heterogéneas No CatalíticasXavi VelezAún no hay calificaciones
- TAREADocumento7 páginasTAREASophia LugoAún no hay calificaciones
- Entrenamiento LotoDocumento30 páginasEntrenamiento Lotoviridiana kristel garcia tenorioAún no hay calificaciones
- FT Z 02004 Zinc Clad IVDocumento4 páginasFT Z 02004 Zinc Clad IVmanosesAún no hay calificaciones
- 1-Postulados de La TgsDocumento5 páginas1-Postulados de La Tgsnimohe87Aún no hay calificaciones
- Tarea SEMANA 3 NIVELACION MATEMATICAS - IACCDocumento5 páginasTarea SEMANA 3 NIVELACION MATEMATICAS - IACCAndrea Sandoval100% (1)
- Simbolizacion - Sistemas de SignosDocumento21 páginasSimbolizacion - Sistemas de SignosmathiasmenaAún no hay calificaciones
- Elementos de DiagramaciónDocumento17 páginasElementos de DiagramaciónSandraNavarroAún no hay calificaciones
- Introduccion A Las Pruebas de Vida AceleradaDocumento54 páginasIntroduccion A Las Pruebas de Vida AceleradaViktor GarcíaAún no hay calificaciones
- Siemens Sitrans LR 400Documento93 páginasSiemens Sitrans LR 400Grinaldo FlorezAún no hay calificaciones
- Presentacion Ciclo Rankine CalderaDocumento11 páginasPresentacion Ciclo Rankine CalderaFrancisco HernandezAún no hay calificaciones
- Pernos Helicoidales Marose 2016 Rev 1Documento28 páginasPernos Helicoidales Marose 2016 Rev 1johnAún no hay calificaciones