También podría gustarte
- Chunchos Reseña HistóricaDocumento2 páginasChunchos Reseña HistóricaJULIO100% (1)
- Mlula Separata 4-4 ProbabilidadesDocumento4 páginasMlula Separata 4-4 ProbabilidadesHaysen FloresAún no hay calificaciones
- T 594 93Documento11 páginasT 594 93Diego Alejandro GonzalezAún no hay calificaciones
- VVAA: La Traducción en La Época IlustradaDocumento262 páginasVVAA: La Traducción en La Época Ilustradacestellés_1Aún no hay calificaciones
- Promocionar El Servidor A Controlador de Dominio ACTIVE DIRECTORYDocumento17 páginasPromocionar El Servidor A Controlador de Dominio ACTIVE DIRECTORYDaniel Banyam MarquezAún no hay calificaciones
- Examen 4º NoviembreDocumento2 páginasExamen 4º NoviembreRainerys BráAún no hay calificaciones
- Enfermeria Monica Poma OKDocumento5 páginasEnfermeria Monica Poma OKCresco PnlAún no hay calificaciones
- Antón ChejóvDocumento4 páginasAntón Chejóvmarta100% (1)
- Quimica Tarea 1Documento6 páginasQuimica Tarea 1David AvendañoAún no hay calificaciones
- Actividad 3 Ensayo Carta A La TierraDocumento4 páginasActividad 3 Ensayo Carta A La TierraJose Samuel pérez olveraAún no hay calificaciones
- Sesion 25. Cavidad Oral, DientesDocumento48 páginasSesion 25. Cavidad Oral, DientesMaría Fe CasañoAún no hay calificaciones
- Examen Diagnostico de Ma Materia de Maquinas ElectricasDocumento7 páginasExamen Diagnostico de Ma Materia de Maquinas ElectricasPedro Rosales GutierrezAún no hay calificaciones
- Hombro DolorosoDocumento5 páginasHombro DolorosoJoaquin SanchezAún no hay calificaciones
- DeflexionesDocumento26 páginasDeflexionesCristian VeraAún no hay calificaciones
- Guion de Charla de Prevención de CaídasDocumento11 páginasGuion de Charla de Prevención de CaídasDani Estrada0% (1)
- SintesisDocumento3 páginasSintesisCasa de MisericordiaAún no hay calificaciones
- Embriogénesis Del Aparato Genital MasculinoDocumento17 páginasEmbriogénesis Del Aparato Genital MasculinoAna Cristina Sanchez ZangAún no hay calificaciones
- Sintesis Documental #15Documento1 páginaSintesis Documental #15Johan RiveraAún no hay calificaciones
- Estudio de Los Casos Barbie y KenDocumento4 páginasEstudio de Los Casos Barbie y KenCompu Servicios Aguilera Trabajos UniversitariosAún no hay calificaciones
- ENSAYO de COMPRESION Reporte LaboratorioDocumento11 páginasENSAYO de COMPRESION Reporte LaboratorioThalìaChávezFallaAún no hay calificaciones
- 5 Años - Planificacion AnualDocumento80 páginas5 Años - Planificacion AnualMARIA ROSA OLIVO PALACIOSAún no hay calificaciones
- Articulo Metaheurística P-Mediana 25-08-2020-1805Documento22 páginasArticulo Metaheurística P-Mediana 25-08-2020-1805Benedicto VillagraAún no hay calificaciones
- Jurisprudencia 2018 - Manzanares, Vilma Margarita C Pcia Santa FeDocumento2 páginasJurisprudencia 2018 - Manzanares, Vilma Margarita C Pcia Santa FeEstudio Alvarezg AsociadosAún no hay calificaciones
- Diferencias IndividualesDocumento4 páginasDiferencias IndividualesXiomara ArenasAún no hay calificaciones
- Analisis Bromatologico de La CarneDocumento31 páginasAnalisis Bromatologico de La CarnefernandoluisAún no hay calificaciones
- Caso Daniel H - Analisis de Caso TAREA #2 PSICOMETRIA IDocumento5 páginasCaso Daniel H - Analisis de Caso TAREA #2 PSICOMETRIA IFATIMA ANDREA RODRIGUEZ ALEJOSAún no hay calificaciones
- El Caso Carlos PublicacionDocumento21 páginasEl Caso Carlos PublicacionSusana Beatriz GarecaAún no hay calificaciones
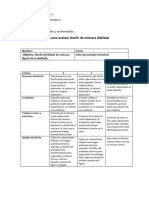
- Rubrica para Evaluar Diseño de MascaraDocumento1 páginaRubrica para Evaluar Diseño de MascaraLizbeth Alva GamarraAún no hay calificaciones
- As Is - To BeDocumento9 páginasAs Is - To BeAndres RiascosAún no hay calificaciones
- Busqueda de GoogleDocumento5 páginasBusqueda de GoogleGuillermo Augusto Lugo BlondellAún no hay calificaciones