Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Universidad de Costa Rica Facultad de Ingeniería Escuela de Ingeniería Eléctrica
Universidad de Costa Rica Facultad de Ingeniería Escuela de Ingeniería Eléctrica
Cargado por
GUICHO11Título original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Universidad de Costa Rica Facultad de Ingeniería Escuela de Ingeniería Eléctrica
Universidad de Costa Rica Facultad de Ingeniería Escuela de Ingeniería Eléctrica
Cargado por
GUICHO11Copyright:
Formatos disponibles
Universidad de Costa Rica
Facultad de Ingeniería
Escuela de Ingeniería Eléctrica
IE – 0502 Proyecto Eléctrico
Cálculo de Corrientes de Cortocircuito en Redes
Eléctricas de Distribución
Por:
Alexánder López Camacho
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución ii
Cálculo de Corrientes de Cortocircuito en Redes
Eléctricas de Distribución
Por:
Alexánder López Camacho
Sometido a la Escuela de Ingeniería Eléctrica
de la Facultad de Ingeniería
de la Universidad de Costa Rica
como requisito parcial para optar por el grado de:
BACHILLER EN INGENIERÍA ELÉCTRICA
Aprobado por el Tribunal:
___________________
Ph.D. Ing. Eddie A. Araya Padilla
Profesor Guía
___________________ ___________________
Ph.D. Ing. Franklin Chinchilla Hidalgo M.Sc. Ing. Eduardo Ortíz Oviedo
Profesor Lector Profesor Lector
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución iii
DEDICATORIA
A mi familia, profesores y amigos; y a todos aquellos
que de una u otra forma han hecho posible la
realización de este proyecto.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución iv
RECONOCIMIENTOS
Al Ing. Dr. Eddie Araya Padilla por su vital aporte y
colaboración en la realización de este proyecto. Al Ing.
Dr. Franklin Chinchilla y al Ing. M Sc. Eduardo Ortiz
por su valiosa contribución al mismo. Al Ing. Eleonel
Arguedas por sus comentarios en cuanto al manejo de
la interfaz gráfica del programa. Finalmente pero no
menos importante a mi familia por su incondicional
apoyo y comprensión.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución v
ÍNDICE GENERAL
ÍNDICE DE FIGURAS.................................................................................. vii
ÍNDICE DE TABLAS................................................................................... viii
NOMENCLATURA........................................................................................ ix
CAPÍTULO 1: Introducción ........................................................................... 1
1.1 Descripción del proyecto .................................................................................................1
1.2 Justificación .....................................................................................................................1
1.3 Objetivos..........................................................................................................................2
1.4 Metodología .....................................................................................................................3
1.4.1 I Etapa. ................................................................................................................ 3
1.4.2 II Etapa.................................................................................................................... 3
1.4.3 III Etapa .................................................................................................................. 3
CAPÍTULO 2: Desarrollo teórico................................................................... 4
2.1 Consideraciones preliminares ..........................................................................................4
2.2 Elementos del sistema y matrices de constantes generalizadas .......................................4
2.3 Líneas de distribución......................................................................................................5
2.3.1 Ecuaciones modificadas de Carson......................................................................... 5
2.3.2 Admitancia en derivación para líneas de distribución ............................................ 5
2.3.3 Matriz de impedancia primitiva para líneas aéreas................................................. 6
2.3.4 Matriz de impedancias de fase para líneas aéreas................................................... 8
2.4 Compensadores de tensión.............................................................................................11
2.5 Transformadores ............................................................................................................11
2.5.1 Modelo general del transformador........................................................................ 11
2.5.2 Transformador D-Y aterrizada.............................................................................. 12
2.5.3 Transformador Y-D .............................................................................................. 14
2.5.4 Transformador Y aterrizada-Y aterrizada............................................................. 17
2.5.5 Transformador D-D .............................................................................................. 18
2.5.6 Transformador Y abierta-D abierta....................................................................... 21
2.6 Modelos de cargas .........................................................................................................24
2.7 Circuito equivalente de Thevenin ..................................................................................24
2.8 Cálculo de cortocircuito.................................................................................................26
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución vi
CAPITULO 3: Estructura del programa .................................................... 31
3.1 Ámbito de aplicación del programa ASDR ...................................................................31
3.2 Consideraciones Iniciales ..............................................................................................31
3.3 Diagrama de flujo del programa ....................................................................................33
3.4 Uso del Programa...........................................................................................................34
CAPITULO 4: Cálculos con el programa.................................................... 35
4.1 Consideraciones iniciales...............................................................................................35
4.2 Pruebas con líneas de distribución.................................................................................35
4.2.1 Ejemplo 1.............................................................................................................. 35
4.2.2 Ejemplo 2.............................................................................................................. 38
4.2.3 Ejemplo 3.............................................................................................................. 41
4.3 Pruebas con transformadores .........................................................................................44
4.3.1 Ejemplo 4.............................................................................................................. 44
4.3.2 Ejemplo 5.............................................................................................................. 46
4.3.3 Ejemplo 6.............................................................................................................. 48
4.3.4 Ejemplo 7.............................................................................................................. 50
4.4 Pruebas con sistemas .....................................................................................................52
4.4.1 Ejemplo 8.............................................................................................................. 52
CAPÍTULO 5: Conclusiones y recomendaciones ....................................... 64
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución vii
1 ÍNDICE DE FIGURAS
Figura 2.1 - Elemento del sistema generalizado ............................................................................. 4
Figura 2.2 - Línea tetrafilar Y con neutro....................................................................................... 7
Figura 2.3 – Modelo trifásico equivalente de la línea..................................................................... 9
Figura 2.4 – Diagrama esquemático generalizado del transformador .......................................... 11
Figura 2.5 – Sistema equivalente.................................................................................................. 24
Figura 2.6 – Sistema equivalente de Thevenin ............................................................................. 25
Figura 2.7 – Sistema equivalente de Thevenin para el estudio de cortocircuito .......................... 26
Figura 3.1 – Esquema de un elemento del sistema ....................................................................... 31
Figura 3.2 – Diagrama de flujo del programa............................................................................... 33
Figura 4.1 – Configuración ejemplo 1 .......................................................................................... 35
Figura 4.2 – Datos para el problema y resultados del programa para el ejemplo 1...................... 36
Figura 4.3 – Configuración ejemplo 2 .......................................................................................... 38
Figura 4.4 – Datos para el problema y resultados del programa para el ejemplo 2...................... 39
Figura 4.5 – Configuración ejemplo 3 .......................................................................................... 41
Figura 4.6 – Datos para el problema y resultados del programa para el ejemplo 3...................... 42
Figura 4.7 – Datos para el problema y resultados del programa para el ejemplo 4...................... 44
Figura 4.8 – Datos para el problema y resultados del programa para el ejemplo 5...................... 46
Figura 4.9 – Datos para el problema y resultados del programa para el ejemplo 6...................... 48
Figura 4.10 – Datos para el problema y resultados del programa para el ejemplo 7.................... 50
Figura 4.11 – Diagrama unifilar ejemplo 8................................................................................... 52
Figura 4.12 – Ejemplo 8, elemento 0-1 ........................................................................................ 53
Figura 4.13 – Configuración ejemplo 8, elemento 1-2 ................................................................. 54
Figura 4.14 – Ejemplo 8, elemento 1-2 ........................................................................................ 55
Figura 4.15 – Ejemplo 8, elemento 2-3 ........................................................................................ 56
Figura 4.16 – Configuración ejemplo 8, elemento 3-4 ................................................................. 57
Figura 4.17 – Ejemplo 8, elemento 3-4 ........................................................................................ 58
Figura 4.18 – Ejemplo 8, elemento 2-5 ........................................................................................ 59
Figura 4.19 – Ejemplo 8, estudio cortocircuito 1 ......................................................................... 60
Figura 4.20 – Ejemplo 8, estudio cortocircuito 2 ......................................................................... 62
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución viii
2 ÍNDICE DE TABLAS
Tabla 4-1 Comparación de resultados para el ejemplo 1 (matriz zabc) ...................................... 37
Tabla 4-2 Comparación de resultados para el ejemplo 2 (matriz zabc) ...................................... 40
Tabla 4-3 Comparación de resultados para el ejemplo 3 (matriz zabc) ...................................... 43
Tabla 4-4 Comparación de resultados para el ejemplo 4 .......................................................... 45
Tabla 4-5 Comparación de resultados para el ejemplo 5 .......................................................... 47
Tabla 4-6 Comparación de resultados para el ejemplo 6 .......................................................... 49
Tabla 4-7 Comparación de resultados para el ejemplo 7 .......................................................... 51
Tabla 4-8 Comparación de resultados para el ejemplo 8, estudio de cortocircuito 1 ............... 61
Tabla 4-9 Resultados para el ejemplo 8, estudio de cortocircuito 2 ......................................... 63
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución ix
3 NOMENCLATURA
Variable Descripción Unidades
[0] Matriz nula de dimensión 3x3.
[a] Matriz constante generalizada para elemento del sistema de distribución,
utilizada en la ecuación que relaciona la tensión de entrada del elemento
en función del tensión de salida y la corriente de salida del mismo.
[A] Matriz constante generalizada para elemento del sistema de distribución,
utilizada en la ecuación que relaciona la tensión de salida del elemento
en función del tensión de entrada y la corriente de salida del mismo.
[at] Matriz constante generalizada para transformador, utilizada en la
ecuación que relaciona la tensión de entrada en función de la tensión de
salida y la corriente de salida del mismo.
[At] Matriz constante generalizada para transformador, utilizada en la
ecuación que relaciona la tensión de salida en función de la tensión de
entrada y la corriente de salida del mismo.
[b] Matriz constante generalizada para elemento del sistema de distribución,
utilizada en la ecuación que relaciona la tensión de entrada del elemento
en función de la tensión de salida y la corriente de salida del mismo.
[B] Matriz constante generalizada para elemento del sistema de distribución,
utilizada en la ecuación que relaciona la tensión de salida del elemento
en función de la tensión de entrada y la corriente de salida del mismo.
[bt] Matriz constante generalizada para transformador, utilizada en la
ecuación que relaciona la tensión de entrada en función de la tensión de
salida y la corriente de salida del mismo.
[Bt] Matriz constante generalizada para transformador, utilizada en la
ecuación que relaciona la tensión de salida en función de la tensión de
entrada y la corriente de salida del mismo.
[c] Matriz constante generalizada para elemento del sistema de distribución,
utilizada en la ecuación que relaciona la corriente de entrada del
elemento en función de la tensión de salida y la corriente de salida del
mismo.
[ct] Matriz constante generalizada para transformador, utilizada en la
ecuación que relaciona la corriente de entrada en función de la tensión
de salida y la corriente de salida del mismo.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución x
[d] Matriz constante generalizada para elemento del sistema de distribución,
utilizada en la ecuación que relaciona la corriente de entrada del
elemento en función de la tensión de salida y la corriente de salida del
mismo.
[dt] Matriz constante generalizada para transformador, utilizada en la
ecuación que relaciona la corriente de entrada en función de la tensión
de salida y la corriente de salida del mismo.
[Iabc] Vector de corrientes línea, en el caso de un transformador se trata de las (A)
corrientes en la salida para las fases a, b y c.
[IABC] Vector de corrientes línea, en el caso de un transformador se trata de las (A)
corrientes en la entrada para las fases a, b y c.
[Iabc]p Vector de corrientes línea en el nodo “p” para las fases a, b y c. (A)
[U] Matriz identidad de dimensión 3x3.
[VLNABC] Vector de tensiones línea a neutro en la entrada del transformador para (V)
las fase a, b y c.
[VLNabc] Vector de tensiones línea a neutro en la salida del transformador (V)
para las fase a, b y c.
[VLNabc]p Vector de tensiones línea a neutro en el nodo “p” para las fases a, b y c. (V)
[Zabc] Matriz de impedancia de fase de la línea de distribución. (Ω)
[Yabc] Matriz de admitancia de fase de la línea de distribución. (S)
Dij Distancia entre los conductores i y j. (Pies)
GMRi Radio medio geométrico del conductor i. (Pies)
j Operador complejo.
ri Resistencia del conductor. (Ω/milla)
zabc Matriz de impedancia de fase de la línea de distribución por unidad de (Ω/milla)
longitud.
zii Impedancia propia de la línea de distribución. (Ω/milla)
zij Impedancia mutua de la línea de distribución. (Ω/milla)
zprimitive Matriz de impedancia primitiva para la línea de distribución. (Ω/milla)
f Frecuencia de operación del sistema (Hz)
r Constante de resistividad de la Tierra (Ω-m)
nt Relación de transformación de los devanados del transformador
monofásico que integra el banco trifásico.
at Relación de transformación del banco trifásico.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución xi
VLLnompri Tensión línea a línea nominal del lado primario. (V)
VLLnomsec Tensión línea a línea nominal del lado secundario. (V)
VLNnompri Tensión línea a neutro nominal del lado primario. (V)
VLNnomsec Tensión línea a neutro nominal del lado secundario. (V)
[Vtabc] Vector de tensiones ideales del transformador sin tomar en cuenta la (V)
impedancia.
[AV] Matriz de transformación entre tensiones de línea a línea en el primario
y tensiones ideales del transformador en el lado secundario.
[VLLABC] Vector de tensiones línea a línea en la entrada del transformador para las (V)
fase a, b y c.
[VLLabc] Vector de tensiones línea a línea en la salida del transformador para las (V)
fase a, b y c.
[W] Matriz de transformación entre tensiones de línea a neutro en el
primario y tensiones línea a línea en el primario.
[Ztabc] Matriz de impedancia de fase del transformador referida a lado (Ω)
secundario.
[D] Matriz de transformación entre tensiones línea a línea en el primario y
tensiones línea a neutro equivalentes en la conexión delta.
[IDabc] Vector de corrientes de fase circulantes por la conexión delta en el (A)
secundario para las fases a, b y c.
[AI] Matriz de transformación entre corrientes de línea en el primario y
corrientes de fase en el secundario en la conexión delta.
[DI] Matriz de transformación entre corrientes de fase en el secundario en la
conexión delta y corrientes de línea en el secundario.
[IDABC] Vector de corrientes de fase circulantes por la conexión delta en el (A)
primario para las fases a, b y c.
[ELNABC] Vector de tensiones línea a neutro de la fuente del sistema. (V)
[ZsysABC] Impedancia equivalente entre la fuente del sistema y el primario del (Ω)
transformador que conecta a la barra en falla.
[Eabc] Vector de tensiones línea a neutro de Thevenin equivalentes en la barra (V)
fallada.
[ZTOT] Matriz de impedancia de Thevenin equivalente para el sistema visto (Ω)
desde la barra fallada.
[Ifabc] Vector de corrientes de línea de falla. (A)
[ZF] Matriz de impedancia de falla. (Ω)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución xii
RESUMEN
El presente trabajo consta de la realización de un programa de cálculo de corrientes de
cortocircuito en redes eléctricas de distribución radiales. El objetivo fue la realización de un
programa cuya interfaz con el usuario sea amigable y sencilla, de manera que el uso del mismo
sea directo y casi intuitivo.
En una primera parte se presenta y desarrolla el fundamento teórico del programa,
posterior a lo cual se establece la estructura del programa y las premisas sobre las cuales se
desarrollará. Luego se presenta un vistazo al programa en sí y se describen las diferentes
pantallas y operaciones relacionadas con el uso del mismo.
Finalmente se presentan una serie de ejemplos teóricos los cuales son comparados con los
resultados obtenidos mediante el uso del software, siendo los resultados excelentes.
Se obtienen finalmente una serie de conclusiones entre las cuales se puede mencionar la
presencia de corrientes de falla desbalanceadas incluso para condiciones de falla simétricas como
en el caso de un cortocircuito trifásico.
A pesar de que el alcance de este trabajo solo cubre los estudios de cortocircuito, el
programa puede modificarse para obtener en versiones posteriores el análisis de flujo de carga y
estabilidad, conservando siempre la estructura modular del mismo.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 1
1 CAPÍTULO 1: Introducción
1.1 Descripción del proyecto
El proyecto consiste en desarrollar una herramienta digital de análisis amigable para el
cálculo de las corrientes de cortocircuito que se presentan en las redes de distribución eléctrica.
Estas corrientes de cortocircuito, serán las que se producen por fallas simétricas y
asimétricas.
Para tal efecto se considerará las diferentes conexiones de los bancos de transformadores
trifásicos usuales en las redes de distribución, constituidos por dos o tres transformadores
monofásicos.
1.2 Justificación
Es bien conocido que una de las fallas principales a considerar en un sistema de potencia
son las fallas de cortocircuito (fallas asimétricas en su mayoría) debido a que es un tipo de falla
muy común, además de su carácter destructivo tanto para el sistema en general como para los
dispositivos involucrados.
Debido a la naturaleza inherentemente desbalanceada de los sistemas de distribución
eléctrica, a su gran tamaño y complejidad; resulta necesario desarrollar un programa digital para
el cálculo de las corrientes de cortocircuito en caso de una falla.
Al desarrollar un software determinado para el cálculo de las fallas de cortocircuito se
puede seleccionar el grado de exactitud de los modelos utilizados para los diferentes
componentes del sistema. Además se puede acceder directamente al código para realizar
modificaciones a los modelos, o cualquier tipo de cambio en el programa, ya sea, en el método
utilizado en el algoritmo de cálculo o en la presentación o manipulación de los datos.
El programa posteriormente se podría editar para agregar otro tipo de cálculos o rutinas de
prueba al sistema de distribución en estudio.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 2
1.3 Objetivos
• Desarrollar una herramienta computacional de cálculo de corrientes de
cortocircuito, debidas tanto a fallas simétricas como asimétricas, con una interfaz
amigable para el usuario.
• Desarrollar el programa de cálculo considerando las diferentes conexiones de los
bancos de transformadores trifásicos, usuales en las redes de distribución,
constituidos por dos o tres transformadores monofásicos.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 3
1.4 Metodología
Para alcanzar los objetivos anteriormente propuestos, se seguirá la siguiente metodología
la cual se halla dividida en etapas y actividades.
1.4.1 I Etapa.
A. Definición precisa del sistema eléctrico modelo con base en el cual se desarrollará el trabajo
(Topología, componentes, datos, estados de carga y de generación)
• Exhaustivo análisis de sistemas eléctricos reales.
• Identificación de las fallas que propician el desarrollo de corrientes de cortocircuito.
1.4.2 II Etapa.
B. Estudio exhaustivo de los modelos matemáticos para cada elemento eléctrico.
C. Formulación de las ecuaciones algebraicas de tensión y corriente para cada elemento
eléctrico.
D. Escritura, pruebas y puesta a punto de un programa digital de cálculo, para determinar las
corrientes de cortocircuito, en correspondencia con la formulación desarrollada en C y D. La
plataforma a utilizar será MATLAB 6.5.
E. Aplicación de los resultados de E en el sistema eléctrico modelo.
1.4.3 III Etapa
F. Redacción de un informe sobre el trabajo desarrollado
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 4
2 CAPÍTULO 2: Desarrollo teórico
2.1 Consideraciones preliminares
Primero se comenzará por establecer los modelos matemáticos de los elementos que
integran el sistema de distribución entre los cuales se pueden mencionar las líneas de
distribución, los compensadores de tensión, los transformadores y las cargas entre otros. Se
definirán para ellos las ecuaciones más importantes para el caso de cortocircuito.
Posterior a ello se procederá a definir el circuito equivalente de Thevenin desde la barra en
la cual se realiza el cálculo de cortocircuito. Esta parte es de vital importancia para la definición
del algoritmo de cálculo de las corrientes de falla para los diversos casos que se efectuarán.
Finalmente se definirá el algoritmo de cálculo de las corrientes de falla para los diversos
casos. Para un desarrollo detallado de las ecuaciones se puede ver la referencia [1].
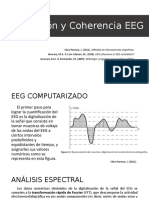
2.2 Elementos del sistema y matrices de constantes generalizadas
Los diversos elementos del sistema de distribución se pueden modelar por medio de bloques
como el que se muestra en la Figura 2.1.
Figura 2.1 - Elemento del sistema generalizado
Como se puede observar, para efectos de cálculo se tomarán en general las tensiones de
línea a neutro y las corrientes de línea. Cada elemento del sistema de distribución será
caracterizado por una serie de matrices conocidas como matrices de constantes generalizadas,
las cuales determinan las relaciones de tensiones y corrientes de la entrada con la salida.
Las matrices de constantes generalizadas se definen por medio de las siguientes ecuaciones:
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 5
⎡[VLN abc ]n ⎤ ⎡[a ] [b]⎤ ⎡[VLN abc ]m ⎤
⎢ [I ] ⎥ = ⎢ ⋅ (2.2-1)
⎣ abc n ⎦ ⎣[c ] [d ]⎥⎦ ⎢⎣ [I abc ]m ⎥⎦
⎡[VLN abc ]m ⎤ ⎡[a ] [b]⎤ −1 ⎡[VLN abc ]n ⎤
⎢ [I ] ⎥ = ⎢ ⋅ (2.2-2)
⎣ abc m ⎦ ⎣[c ] [d ]⎥⎦ ⎢⎣ [I abc ]n ⎥⎦
[VLN abc ]m = [A]⋅ [VLN abc ]n − [B ]⋅ [I abc ]m (2.2-1)
2.3 Líneas de distribución
2.3.1 Ecuaciones modificadas de Carson
Para el cálculo de la impedancia propia y mutua de los conductores de las líneas de
distribución se utilizará una variación de las ecuaciones de Carson [6], que en adelante serán
nombradas como ecuaciones de Carson modificadas.
⎛ 1 1 ρ⎞
zii = ri + 0.00158836 ⋅ f + j 0.00202237 ⋅ f ⎜⎜ ln + 7.6786 + ln ⎟⎟ Ω/milla (2.3.1-1)
⎝ GMRi 2 f ⎠
⎛ 1 1 ρ⎞
z ij = 0.00158836 ⋅ f + j 0.00202237 ⋅ f ⎜ ln + 7.6786 + ln ⎟ Ω/milla (2.3.1-1)
⎜ D 2 f ⎟⎠
⎝ ij
Estas ecuaciones se utilizarán para el análisis de las líneas aéreas; en el presente trabajo
solo se considerarán los casos de líneas de distribución aéreas debido a que son las más comunes
en Costa Rica. En las ecuaciones anteriores se considera la frecuencia de operación para el
cálculo de la impedancia, además de la constante de resistividad de la Tierra (100 Ohms-metro
aproximadamente).
2.3.2 Admitancia en derivación para líneas de distribución
El programa ha sido desarrollado para líneas de corta longitud (menos de 80 km ó 50
millas) para las cuales el efecto de la admitancia en derivación es despreciable, por tanto se
utilizará un modelo simplificado serie para las líneas aéreas.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 6
2.3.3 Matriz de impedancia primitiva para líneas aéreas
Las ecuaciones (2.3.1-1) y (2.3.1-2) se utilizan para la formación de la matriz de
impedancia primitiva de la línea la cual es de dimensión mxm donde m es el número de
conductores neutros que posea la línea. Esta matriz se define en la ecuación (2.3.3-1).
⎡ zaa zab zac zan1 zan2 zanm ⎤
⎢z zbb zbc zbn1 zbn2 zbnm ⎥⎥
⎢ ba
⎢ zca zcnm ⎥
[z primitive ] =⎢
zcb zcc zcn1 zcn2
⎥ (2.3.3-1)
⎢ zn1a zn1b zn1c zn1n1 zn1n2 zn1nm ⎥
⎢ zn a zn2b zn2c zn2n1 zn2n2 zn2nm ⎥
⎢ 2 ⎥
⎢⎣ znma znmb znmc znmn1 znmn2 znmnm ⎥⎦
En forma particionada la ecuación (2.3.3-1) sería:
[z primitive ] = ⎡⎢[[zz ]] [[zz ]]⎤⎥
ij in
(2.3.3-2)
⎣ nj nm⎦
Donde
zij: Impedancia por unidad de longitud entre los conductores de la fase i y la fase j.
zin: Impedancia por unidad de longitud entre el conductor de fase i y el neutro n.
znj: Impedancia por unidad de longitud entre el neutro n y el conductor de fase j.
znm: Impedancia por unidad de longitud entre el neutro n y el neutro m.
En el caso de un sistema tetrafilar como el que se muestra en la Figura 2.2 se tiene que la
ecuación (2.3.3-1) sería de la forma:
⎡ zaa zab zac zan ⎤
⎢z zbn ⎥⎥
[z primitive ] = ⎢ ba
⎢ zca
zbb
zcb
zbc
zcc zcn ⎥
(2.3.3-3)
⎢ ⎥
⎣ zna znb znc znn ⎦
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 7
Además la ecuación (2.3.3-2) sería de la forma:
[z primitive ] = ⎡⎢[[zz ]] [[zz ]]⎤⎥
ij in
(2.3.3-4)
⎣ nj nn ⎦
Figura 2.2 - Línea tetrafilar Y con neutro
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 8
2.3.4 Matriz de impedancias de fase para líneas aéreas
Para realizar los cálculos e integrar el modelo de línea al resto del sistema es necesario
estandarizar la matriz de impedancia primitiva, para ello se utiliza el método de reducción de
Kron [5] definido por la siguiente ecuación.
[zabc ] = [zij ]− [zin ]⋅ [znn ]−1 ⋅ [znj ]
(2.3.4-1)
Aplicando el método de reducción de Kron establecido por la ecuación (2.3.4-1) a la
matriz de la ecuación (2.3.3-4) se obtiene la matriz de impedancia de fase de dimensión 3x3 que
se muestra en la siguiente ecuación.
⎡ zaa zab zac ⎤
[zabc ] = ⎢⎢ zba zbb zbc ⎥⎥ Ω/milla (2.3.4-2)
⎢⎣ zca zcb zcc ⎥⎦
La matriz definida por la ecuación (2.3.4-2) es conocida como matriz de impedancia de
fase y es la usada como modelo de impedancia de la línea en el resto de los cálculos. En este
caso se tendría el segmento de línea equivalente mostrado en la Figura 2.3.
En el caso de que uno o más de los conductores de fase no existiera, como en el caso de
los sistemas monofásicos, o los sistemas D abierta; en la matriz de impedancia primitiva definida
en la ecuación (2.3.3-3) las entradas relacionadas con dichas fases serían cero, y a dicha matriz
se le aplicaría la transformación de Kron para obtener la matriz de impendancia de fase
correspondiente. En el caso de sistema Delta, la matriz de impedancia de fase es igual a la matriz
de impedancia primitiva, en este caso no se aplica la reducción de Kron.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 9
Figura 2.3 – Modelo trifásico equivalente de la línea
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 10
Además se utilizarán las matrices constantes generalizadas que para este elemento serían:
[a ] = [U ] (2.3.4-3)
[b] = [Z abc ] (2.3.4-4)
[c ] = [0] (2.3.4-5)
[d ] = [U ] (2.3.4-6)
[A] = [U ] (2.3.4-7)
[B ] = [Z abc ] (2.3.4-8)
Si se tomara en consideración el efecto de la admitancia en derivación las constantes
generalizadas que definen el modelo de la línea tomarían la siguiente forma:
[a ] = [U ] + 1 ⋅ [Z abc ]⋅ [Yabc ] (2.3.4-9)
2
[b] = [Z abc ] (2.3.4-10)
[c ] = [Yabc ] + 1 ⋅ [Yabc ]⋅ [Z abc ]⋅ [Yabc ] (2.3.4-11)
4
[d ] = [U ] + 1 ⋅ [Z abc ]⋅ [Yabc ] (2.3.4-12)
2
[A] = [a ]−1 (2.3.4-13)
[B ] = [a ]−1 ⋅ [b] (2.3.4-14)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 11
2.4 Compensadores de tensión
En el caso del análisis de cortocircuito se supondrá que todos los compensadores de
tensión se hallan en posición neutra; y como la impedancia de los mismos es despreciable no se
tomarán en cuenta durante el análisis.
2.5 Transformadores
Dentro de los modelos considerados se tomarán los bancos D-Y aterrizada, Y-D, Y
aterrizada – Y aterrizada, D-D y Y abierta-D abierta. Debido a la característica modular del
programa se pueden incluir tantos modelos para transformadores como se desee.
2.5.1 Modelo general del transformador
En general se puede modelar a un transformador como el elemento representado en la
Figura 2.4.
Lado Primario Lado Secundario
IA Ia
H1 X1
+ + - - + +
VAN IB VAB Vab Ib Van
- -
H2 X2
+ +
+ +
VBN Vbn
IC VBC VCA Vca Vbc Ic
- + + -
H3 X3
+ +
VCN Vcn
IN In
- - - - - -
H0 X0
Figura 2.4 – Diagrama esquemático generalizado del transformador
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 12
En el caso de tratarse de un transformador D, se prescindirá del uso del neutro; sin
embargo para efecto de los cálculos se utilizarán los valores de tensión de línea a neutro
equivalentes. Como se nota en la Figura 2.4 las letras mayúsculas denotan el lado de la fuente
(entrada o nodo n) del transformador, mientras que las letras minúsculas denotan el lado de la
carga (salida o nodo m) del mismo.
Se utilizarán las matrices de constantes generalizadas para caracterizar a los diversos
tipos de conexiones de transformadores, solamente que para este caso se indicará por medio del
subíndice t asociado a la matriz correspondiente. De esta forma, los transformadores en general
tendrían las ecuaciones:
⎡[VLN ABC ]⎤ ⎡[at ] [bt ]⎤ ⎡[VLN abc ]⎤
⎢ [I ] ⎥ = ⎢ ⋅ (2.5.1-1)
⎣ ABC ⎦ ⎣[ct ] [dt ]⎥⎦ ⎢⎣ [I abc ] ⎥⎦
[VLN abc ] = [At ]⋅ [VLN ABC ] − [Bt ]⋅ [I abc ] (2.5.1-2)
2.5.2 Transformador D-Y aterrizada
Primero se define la relación de transformación de los devanados por la siguiente
ecuación:
VLLnompri
nt = (2.5.2-1)
VLN nom sec
También es necesario definir la relación de transformación del banco trifásico la cual se
define mediante la siguiente ecuación:
VLLnomprim
at = (2.5.2-2)
VLLnom sec
Se define la relación entre la tensión línea a línea del primario con respecto a las
tensiones ideales del secundario (estas tensiones son aquellas que se dan en los devanados del
secundario sin tomar en cuenta la impedancia del transformador, la cual se referirá del lado
secundario) la cual es dada por la siguiente ecuación
[VLL ABC ] = [AV ]⋅ [Vt abc ] (2.5.2-3)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 13
donde
⎡ 0 − nt 0 ⎤
[AV ] = ⎢⎢ 0 0 − nt ⎥⎥ (2.5.2-4)
⎢⎣ − nt 0 0 ⎥⎦
Como fue definido con anterioridad para todos los cálculos se utilizarán las tensiones
línea a neutro para todos los elementos; por tanto es necesario definir para el lado primario de
esta conexión de transformador las tensiones línea a neutro equivalentes en el lado delta, los
cuales se pueden obtener mediante la siguiente transformación
[VLN ABC ] = [W ]⋅ [VLL ABC ]
(2.5.2-5)
donde
⎡2 1 0⎤
1⎢
[W ] = ⎢0 2 1 ⎥⎥ (2.5.2-6)
3
⎢⎣1 0 2⎥⎦
Además se puede definir una relación de transformación entre tensiones línea a línea y
las tensiones línea a neutro equivalentes para la conexión delta expresada en la ecuación
[VLL ABC ] = [D ]⋅ [VLN ABC ] (2.5.2-7)
donde
⎡ 1 −1 0 ⎤
[D ] = ⎢⎢ 0 1 − 1⎥⎥ (2.5.2-8)
⎢⎣ − 1 0 1 ⎥⎦
La matriz de impedancia de fase del transformador viene dada por la ecuación
⎡ Zt a 0 0 ⎤
[Zt abc ] = ⎢⎢ 0 Zt b 0 ⎥⎥ (2.5.2-9)
⎢⎣ 0 0 Zt c ⎥⎦
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 14
Las matrices constantes de generalizadas definidas por las ecuaciones (2.5.1-1) y
(2.5.1-2) serán definidas mediante las ecuaciones
⎡0 2 1 ⎤
− nt ⎢
[at ] = ⎢ 1 0 2⎥⎥ (2.5.2-10)
3
⎢⎣ 2 1 0 ⎥⎦
⎡ 0 2 ⋅ Zt b Zt c ⎤
− nt ⎢
[bt ] = Zt a 0 2 ⋅ Zt c ⎥⎥ (2.5.2-11)
3 ⎢
⎢⎣2 ⋅ Zt a Zt b 0 ⎥⎦
[ct ] = [0] (2.5.2-12)
⎡ 1 −1 0 ⎤
1⎢
[dt ] = ⎢ 0 1 − 1⎥⎥ (2.5.2-13)
nt
⎢⎣ − 1 0 1 ⎥⎦
⎡1 0 − 1⎤
1⎢
[At ] = ⎢− 1 1 0 ⎥⎥ (2.5.2-14)
nt
⎢⎣ 0 − 1 1 ⎥⎦
⎡ Zt a 0 0 ⎤
[Bt ] = ⎢⎢ 0 Zt b 0 ⎥⎥ (2.5.2-15)
⎢⎣ 0 0 Zt c ⎦⎥
2.5.3 Transformador Y-D
Primero se define la relación de transformación de los devanados por la siguiente
ecuación:
VLN nompri
nt = (2.5.3-1)
VLLnom sec
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 15
Se define la relación entre la tensión línea a neutro del primario con respecto a las
tensiones ideales del secundario (estas tensiones son aquellas que se dan en los devanados del
secundario sin tomar en cuenta la impedancia del transformador, la cual se referirá del lado
secundario) la cual es dada por la siguiente ecuación
[VLN ABC ] = [AV ]⋅ [Vt abc ] (2.5.3-2)
donde [AV] se definió anteriormente en la ecuación (2.5.2-4).
Las ecuaciones (2.5.2-5) y (2.5.2-6) de transformación de las tensiones línea a línea, a
tensiones línea a neutro equivalentes para una conexión delta, son validas también para este caso.
Además se puede definir una relación de transformación entre las corrientes de línea en el
primario y las corrientes de fase circulantes por la conexión delta en el secundario expresada en
la ecuación
[IDabc ] = [AI ] ⋅ [I ABC ] (2.5.3-3)
donde
⎡ nt 0 0⎤
[AI ] = ⎢⎢ 0 nt 0 ⎥⎥ (2.5.3-4)
⎢⎣ 0 0 nt ⎥⎦
También se puede definir una relación de transformación entre las corrientes de fase en el
secundario circulantes por la conexión delta y las corrientes de línea en el secundario expresada
en la ecuación
[I abc ] = [DI ]⋅ [IDabc ] (2.5.3-5)
donde
⎡1 0 − 1⎤
⎢
[DI ] = ⎢− 1 1 0 ⎥⎥ (2.5.3-6)
⎢⎣ 0 − 1 1 ⎥⎦
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 16
La matriz de impedancia de fase del transformador viene dada por la ecuación
⎡ Zt ab 0 0 ⎤
[Zt abc ] = ⎢⎢ 0 Zt bc 0 ⎥⎥ (2.5.3-7)
⎢⎣ 0 0 Zt ca ⎥⎦
La matrices constantes generalizadas definidas por las ecuaciones (2.5.1-1) y
(2.5.1-2) serán definidas mediante las ecuaciones
⎡ 1 −1 0 ⎤
[at ] = nt ⋅ ⎢⎢ 0 1 − 1⎥⎥ (2.5.3-8)
⎢⎣ − 1 0 1 ⎥⎦
⎡ Zt ab − Zt ab 0⎤
nt ⎢
[bt ] = ⎢ Ztbc 2 ⋅ Ztbc 0⎥⎥ (2.5.3-9)
3
⎢⎣ − 2 ⋅ Zt ca − Zt ca 0⎥⎦
[ct ] = [0] (2.5.3-10)
⎡ 1 − 1 0⎤
1 ⎢
[dt ] = ⎢ 1 2 0⎥⎥ (2.5.3-11)
3 ⋅ nt
⎢⎣ − 2 − 1 0⎥⎦
⎡2 1 0⎤
1 ⎢
[At ] = ⎢ 0 2 1 ⎥⎥ (2.5.3-12)
3 ⋅ nt
⎢⎣1 0 2⎥⎦
⎡ 2 ⋅ Zt ab + Zt bc 2 ⋅ Zt bc − 2 ⋅ Zt ab 0⎤
1 ⎢
[Bt ] = ⋅ ⎢2 ⋅ Ztbc − 2 ⋅ Zt ca 4 ⋅ Zt bc − Zt ca 0 ⎥⎥ (2.5.3-13)
9
⎢⎣ Zt ab − 4 ⋅ Zt ca − Zt ab − 2 ⋅ Zt ca 0 ⎥⎦
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 17
2.5.4 Transformador Y aterrizada-Y aterrizada
Primero se define la relación de transformación de los devanados por la siguiente
ecuación:
VLN nompri
nt = (2.5.4-1)
VLN nom sec
Se define la relación entre la tensión línea a neutro del primario con respecto a las
tensiones ideales del secundario (estas tensiones son aquellas que se dan en los devanados del
secundario sin tomar en cuenta la impedancia del transformador, la cual se referirá del lado
secundario) la cual es dada por la siguiente ecuación
[VLN ABC ] = [AV ]⋅ [Vt abc ] (2.5.4-2)
donde
⎡ nt 0 0⎤
[AV ] = ⎢⎢ 0 nt 0 ⎥⎥ (2.5.4-3)
⎢⎣ 0 0 nt ⎥⎦
La matriz de impedancia de fase del transformador viene dada por la ecuación
⎡ Zt a 0 0 ⎤
[Zt abc ] = ⎢⎢ 0 Zt b 0 ⎥⎥ (2.5.4-4)
⎢⎣ 0 0 Zt c ⎥⎦
La matrices de constantes generalizadas definidas por las ecuaciones (2.5.1-1) y
(2.5.1-2) serán definidas mediante las ecuaciones
⎡ nt 0 0⎤
[at ] = ⎢⎢ 0 nt 0 ⎥⎥ (2.5.4-5)
⎢⎣ 0 0 nt ⎥⎦
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 18
⎡ nt Zt a 0 0 ⎤
[bt ] = ⎢⎢ 0 nt Ztb 0 ⎥⎥ (2.5.4-6)
⎢⎣ 0 0 nt Zt c ⎥⎦
[ct ] = [0] (2.5.4-7)
⎡1 ⎤
⎢ 0 0⎥
⎢ nt ⎥ (2.5.4-8)
1
[dt ] = ⎢⎢ 0 0⎥
⎥
nt
⎢ 1⎥
⎢0 0 ⎥
⎢⎣ nt ⎥⎦
⎡1 ⎤
⎢ 0 0⎥
⎢ nt ⎥
1
[At ] = ⎢⎢ 0 0⎥
⎥ (2.5.4-9)
nt
⎢ 1⎥
⎢0 0 ⎥
⎣⎢ nt ⎦⎥
⎡ Zt a 0 0 ⎤
[Bt ] = ⎢⎢ 0 Zt b 0 ⎥⎥ (2.5.4-10)
⎢⎣ 0 0 Zt c ⎥⎦
2.5.5 Transformador D-D
Primero se define la relación de transformación de los devanados por la siguiente
ecuación:
VLLnompri
nt = (2.5.5-1)
VLLnom sec
Se define la relación entre la tensión línea a línea del primario con respecto a las
tensiones ideales del secundario (estas tensiones son aquellas que se dan en los devanados del
secundario sin tomar en cuenta la impedancia del transformador, la cual se referirá del lado
secundario) la cual es dada por la siguiente ecuación
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 19
[VLL ABC ] = [AV ]⋅ [Vtabc ] (2.5.5-2)
donde
⎡ nt 0 0⎤
[AV ] = ⎢⎢ 0 nt 0 ⎥⎥ (2.5.5-3)
⎢⎣ 0 0 nt ⎥⎦
Las ecuaciones (2.5.2-5) y (2.5.2-6) de transformación de las tensiones línea a línea, a
tensiones línea a neutro equivalentes para una conexión delta son validas también para este caso.
Además se puede definir una relación de transformación entre las corrientes de fase en el
primario y las corrientes de fase circulantes por la conexión delta en el secundario expresada en
la ecuación
[IDabc ] = [AI ] ⋅ [IDABC ] (2.5.5-4)
donde
⎡1 ⎤
⎢ 0 0⎥
⎢ nt ⎥
1 (2.5.5-5)
[AI ] = ⎢⎢ 0 0⎥
⎥
nt
⎢ 1⎥
⎢0 0 ⎥
⎢⎣ nt ⎥⎦
También se pueden definir las relaciones de transformación entre las corrientes de fase en
los devanados y las corrientes de línea para ambos lados del transformador
[I abc ] = [DI ]⋅ [IDabc ] (2.5.5-6)
[I ABC ] = [DI ]⋅ [IDABC ] (2.5.5-7)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 20
donde
⎡1 0 − 1⎤
⎢
[DI ] = ⎢− 1 1 0 ⎥⎥ (2.5.5-8)
⎢⎣ 0 − 1 1 ⎥⎦
La matriz de impedancia de fase del transformador viene dada por la ecuación
⎡ Zt ab 0 0 ⎤
[Zt abc ] = ⎢⎢ 0 Zt bc 0 ⎥⎥ (2.5.5-9)
⎢⎣ 0 0 Zt ca ⎥⎦
Otra ecuación adicional de utilidad sería la que relaciona la corriente de fase del
secundario con la corriente de línea del secundario
[IDabc ] = [G1] ⋅ [I abc ] (2.5.5-10)
donde
⎡ Zt ca − Ztbc 0⎤
1 ⎢
[G1] = ⋅ Zt ca Zt ab + Zt ca 0⎥⎥ (2.5.5-11)
Zt ab + Ztbc + Zt ca ⎢
⎢⎣ − Zt ab − Ztbc − Ztbc 0⎥⎦
Las matrices de constantes generalizadas definidas por las ecuaciones (2.5.1-1) y
(2.5.1-2) serán definidas mediante las ecuaciones
⎡ 2 − 1 − 1⎤
nt ⎢
[at ] = ⋅ ⎢− 1 2 − 1⎥⎥ (2.5.5-11)
3
⎢⎣ − 1 − 1 2 ⎥⎦
[bt ] = [W ]⋅ [AV ]⋅ [Zt abc ]⋅ [G1] (2.5.5-12)
donde las matrices de la ecuación (2.5.5-12) fueron definidas con anterioridad.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 21
[ct ] = [0] (2.5.5-13)
⎡1 ⎤
⎢ 0 0⎥
⎢ nt ⎥ (2.5.5-14)
1
[dt ] = ⎢⎢ 0 0⎥
⎥
nt
⎢ 1⎥
⎢0 0 ⎥
⎢⎣ nt ⎥⎦
⎡ 2 − 1 − 1⎤
1 ⎢
[At ] = ⎢ − 1 2 − 1⎥⎥ (2.5.5-15)
3 ⋅ nt
⎢⎣ − 1 2 − 1⎥⎦
[Bt ] = [W ]⋅ [Zt abc ]⋅ [G1] (2.5.5-16)
donde las matrices de la ecuación (2.5.5-16) fueron definidas con anterioridad.
2.5.6 Transformador Y abierta-D abierta
Las ecuaciones que se muestran a continuación son aplicadas para una conexión que
utiliza las fases A y B en el primario y las fases a, b y c en el secundario con b como punto
común.
Primero se define la relación de transformación de los devanados por la siguiente
ecuación:
VLN nompri
nt = (2.5.6-1)
VLLnom sec
Se define la relación entre la tensión línea a neutro del primario con respecto a las
tensiones ideales del secundario (estas tensiones son aquellas que se dan en los devanados del
secundario sin tomar en cuenta la impedancia del transformador, la cual se referirá del lado
secundario) la cual es dada por la siguiente ecuación
[VLN ABC ] = [AV ]⋅ [Vtabc ] (2.5.6-2)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 22
donde
⎡ nt 0 0⎤
[AV ] = ⎢⎢ 0 nt 0 ⎥⎥ (2.5.6-3)
⎢⎣ 0 0 nt ⎥⎦
Las ecuaciones (2.5.2-5) y (2.5.2-6) de transformación de las tensiones línea a línea, a
tensiones línea a neutro equivalentes para una conexión delta son validas también para este caso.
Además se puede definir una relación de transformación entre las corrientes de línea en el
primario y las corrientes de línea en el secundario expresada en la ecuación
[I abc ] = [AI ]⋅ [I ABC ] (2.5.6-4)
donde
⎡ nt 0 0⎤
[AI ] = ⎢⎢− nt nt 0⎥⎥ (2.5.6-5)
⎢⎣ 0 − nt 0⎥⎦
La matriz de impedancia de fase del transformador para esta configuración viene dada
por la ecuación
⎡ Zt ab 0 0⎤
[Zt abc ] = ⎢⎢ 0 Ztbc 0⎥⎥ (2.5.6-6)
⎢⎣ 0 0 0⎥⎦
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 23
La matrices de constantes generalizadas definidas por las ecuaciones (2.5.1-1) y
(2.5.1-2) serán definidas mediante las ecuaciones
⎡ nt − nt 0 ⎤
[at ] = ⎢⎢ 0 nt − nt ⎥⎥ (2.5.6-7)
⎢⎣ 0 0 0 ⎥⎦
⎡nt ⋅ Zt ab 0 0 ⎤ (2.5.6-8)
[bt ] = ⎢⎢ 0 0 − nt ⋅ Zt ab ⎥⎥
⎣⎢ 0 0 0 ⎦⎥
[ct ] = [0] (2.5.6-9)
⎡1 ⎤
⎢n 0 0 ⎥
⎢ t ⎥ (2.5.6-10)
1⎥
[dt ] = ⎢ 0 0 −
⎢ nt ⎥
⎢0 0 0 ⎥
⎢ ⎥
⎣ ⎦
⎡2 1 0⎤
1 ⎢
[At ] = ⎢ − 1 1 0⎥⎥ (2.5.6-11)
3 ⋅ nt
⎢⎣ − 1 − 2 0⎥⎦
⎡ 2 ⋅ Zt ab 0 − Zt bc ⎤ (2.5.6-12)
1⎢
[Bt ] = ⎢ − Zt ab 0 − Zt bc ⎥⎥
3
⎢⎣ − Zt ab 0 2 ⋅ Ztbc ⎥⎦
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 24
2.6 Modelos de cargas
Los modelos de las cargas no se usarán debido a que se depreciará la contribución de
corriente de las mismas. En general solamente se tomarán en cuenta las impedancias en la
trayectoria que va desde la barra fuente hacia la barra fallada, despreciando el resto del sistema.
2.7 Circuito equivalente de Thevenin
Hasta ahora se han desarrollado los modelos de los diferentes elementos del sistema, pero
para el cálculo de cortocircuito es necesario determinar la impedancia equivalente vista por la
barra fallada a fin de desarrollar el algoritmo de cálculo.
El cálculo de cortocircuito requiere el equivalente de Thevenin del sistema referido al lado
secundario del transformador que se conecta a la barra fallada. Este equivalente de Thevenin
debe considerar la impedancia equivalente entre la fuente y el primario del transformador. La
Figura 2.5 muestra un esquema del circuito equivalente de un sistema típico.
Figura 2.5 – Sistema equivalente
El circuito equivalente de Thevenin necesita ser determinado en el secundario del
transformador; esto básicamente consiste en referir los voltajes de la fuente y la impedancia del
sistema al secundario del transformador.
En la Figura 2.5 los voltajes línea a neutro equivalentes en el primario del transformador
como función de los voltajes de la fuente y la impedancia equivalente entre la fuente y el
primario, son dados por la ecuación
[VLN ABC ] = [ELN ABC ] − [Zsys ABC ] ⋅ [I ABC ] (2.7-1)
siendo
[I ABC ] = [dt ] ⋅ [I abc ] (2.7-2)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 25
por tanto
[VLN ABC ] = [ELN ABC ] − [Zsys ABC ] ⋅ [dt ][I abc ] (2.7-3)
Se definió anteriormente la ecuación que expresa las tensiones línea a neutro de la salida
en función de las tensiones línea a neutro en la entrada y la corriente de salida, la cual es
[VLN abc ] = [At ]⋅ [VLN ABC ] − [Bt ]⋅ [I abc ] (2.7-4)
sustituyendo la ecuación (2.7-3) en (2.7-4) se tiene
[VLN abc ] = [At ]⋅ {[ELN ABC ] − [Zsys ABC ]⋅ [dt ]⋅ [I abc ]}− [Bt ]⋅ [I abc ] (2.7-5)
haciendo referencia a la ecuación (2.7-5) las tensiones y la impedancia de Thevenin equivalentes
serían definidos por las ecuaciones
[Ethabc ] = [At ]⋅ [ELN ABC ] (2.7-6)
[Zthabc ] = [At ]⋅ [Zsys ABC ]⋅ [dt ] + [Bt ] (2.7-7)
las ecuaciones anteriores definen el modelo equivalente de Thevenin que se muestra en la Figura
2.6 el cual será usado en el algoritmo de cálculo de las corrientes de cortocircuito.
Figura 2.6 – Sistema equivalente de Thevenin
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 26
2.8 Cálculo de cortocircuito
El cálculo de las corrientes de cortocircuito para fallas asimétricas en un sistema trifásico
normalmente balanceado ha sido tradicionalmente tratado por la aplicación de componentes
simétricas. Sin embargo, no se puede justificar la aplicación de este método a un sistema de
distribución el cual es inherentemente desbalanceado. El acoplamiento desigual entre las fases
lleva a un acoplamiento entre las redes de secuencia, y cuando esto ocurre el método de las
componentes simétricas no es satisfactorio.
Para el cálculo de fallas en un sistema de distribución radial desbalanceado, es necesario
calcular el equivalente de Thevenin entre la fuente y la barra donde se produce la falla, que en
este caso será igual a la suma de las impedancias de fase de todos los elementos de sistema entre
la fuente y la barra donde se produce la falla. Se realiza entonces un recorrido entre la fuente y el
nodo de falla; cada vez que se encuentre un transformador se aplica la conversión de voltajes e
impedancias del lado primario al secundario y se continua hasta llegar a la barra donde se
produce la falla, así se obtiene el equivalente de Thevenin visto desde la barra en falla. Se
obtiene entonces el sistema que se muestra en la Figura 2.7; en donde Ea, Eb y Ec representan
las tensiones línea a neutro equivalentes en la barra fallada; la matriz [ZTOT] representa la
matriz de impedancia de Thevenin equivalente vista desde la barra fallada. La impedancia de
falla se representa por medio de Zf.
Ifa
a
+
Zf Vax
Ifb
b - x
[ZTOT] + Vbx - +
-
Zf
Ifc Vcx
c
+
Zf Vxg
Ea Eb Ec
Barra en Falla
g -
Figura 2.7 – Sistema equivalente de Thevenin para el estudio de cortocircuito
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 27
Si se aplica la ley de tensiones de Kirchhoff al circuito de la Figura 2.7 se tiene
⎡ Ea ⎤ ⎡ Z aa Z ab Z ac ⎤ ⎡ If a ⎤ ⎡ Z f 0 0 ⎤ ⎡ If a ⎤ ⎡Vax ⎤ ⎡Vxg ⎤
⎢ E ⎥ = ⎢Z ⎢ ⎥ ⎢ ⎥
⎢ b ⎥ ⎢ ba Z bb Z bc ⎥⎥ ⋅ ⎢⎢ If b ⎥⎥ + ⎢ 0 Zf 0 ⎥ ⋅ ⎢⎢ If b ⎥⎥ + ⎢⎢Vbx ⎥⎥ + ⎢Vxg ⎥ (2.8-1)
⎢⎣ Ec ⎥⎦ ⎢⎣ Z ca Z cb Z cc ⎥⎦ ⎢⎣ If c ⎥⎦ ⎢⎣ 0 0 Z f ⎥⎦ ⎢⎣ If c ⎥⎦ ⎢⎣Vcx ⎥⎦ ⎢⎣Vxg ⎥⎦
en forma compacta la ecuación (2.8-1) sería
[Eabc ] = [ZTOT ]⋅ [If abc ] + [ZF ]⋅ [If abc ] + [Vabcx ] + [Vxg ] (2.8-2)
combinando los términos en la ecuación (2.8-2)
[Eabc ] = [ZEQ]⋅ [If abc ] + [Vabcx ] + [Vxg ] (2.8-3)
donde
[ZEQ ] = [ZTOT ] + [ZF ] (2.8-4)
resolviendo la ecuación (2.8-3) para las corrientes de falla
[If abc ] = [Y ]⋅ [Eabc ] − [Y ]⋅ [Vabcx ] − [Y ]⋅ [Vxg ] (2.8-5)
donde
[Y ] = [ZEQ]−1 (2.8-6)
debido a que las matrices [Y] y [Eabc] son conocidas para el sistema, se define
[IPabc ] = [Y ]⋅ [Eabc ] (2.8-7)
sustituyendo la ecuación (2.8-7) en la ecuación (2.8-5) y reagrupando términos se tiene
[IPabc ] = [If abc ] + [Y ]⋅ [Vabcx ] + [Y ]⋅ [Vxg ] (2.8-8)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 28
En forma expandida la ecuación (2.8-8) es:
⎡ IPa ⎤ ⎡ If a ⎤ ⎡Yaa Yab Yac ⎤ ⎡Vax ⎤ ⎡Yaa Yab Yac ⎤ ⎡Vxg ⎤
⎢ IP ⎥ = ⎢ If ⎥ + ⎢Y ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ (2.8-9)
⎢ b ⎥ ⎢ b ⎥ ⎢ ba Ybb Ybc ⎥ ⋅ ⎢Vbx ⎥ + ⎢Yba Ybb Ybc ⎥ ⋅ ⎢Vxg ⎥
⎢⎣ IPc ⎥⎦ ⎢⎣ If c ⎥⎦ ⎢⎣Yca Ycb Ycc ⎥⎦ ⎢⎣Vcx ⎥⎦ ⎢⎣Yca Ycb Ycc ⎥⎦ ⎢⎣Vxg ⎥⎦
la ecuación (2.8-9) se puede escribir en la forma de componentes:
IPa = If a + Yaa ⋅ Vax + Yab ⋅ Vbx + Yac ⋅ Vcx + Ysa ⋅ Vxg (2.8-10)
IPb = If b + Yba ⋅ Vax + Ybb ⋅Vbx + Ybc ⋅Vcx + Ysb ⋅Vxg (2.8-11)
IPc = If c + Yca ⋅ Vax + Ycb ⋅ Vbx + Ycc ⋅ Vcx + Ysc ⋅ Vxg (2.8-12)
donde
Ysa = Yaa + Yab + Yac (2.8-13)
Ysb = Yba + Ybb + Ybc (2.8-14)
Ysc = Yca + Ycb + Ycc (2.8-15)
Las ecuaciones (2.8-10) a (2.8-12) vienen a ser las ecuaciones que sirven para simular
todos los tipos de cortocircuitos en un sistema de distribución. Se tienen básicamente tres
ecuaciones y siete incógnitas (Ifa, Ifb, Ifc, Vax, Vbx, Vcx y Vxg) las otras tres variables en las
ecuaciones (IPa, IPb, IPc) son funciones de la impedancia y las tensiones de Thevenin
equivalentes del sistema visto desde la barra en falla; y por tanto son conocidos. Para definir las
otras cuatro ecuaciones adicionales a fin de obtener una solución única para el sistema se
plantean para cada falla las condiciones en el diagrama que corresponden a la misma. Por
ejemplo una falla trifásica se obtendría en el diagrama colocando un cortocircuito que una los
nodos a, b y c de la Figura 2.7 con el nodo x. Esto es lo mismo que definir las condiciones para
los voltajes de los nodos a, b y c con respecto a x. La cuarta ecuación vendría de la aplicación de
la ley de corrientes de Kirchhoff en el nodo x, lo que haría la suma de corrientes en el nodo x
igual a cero. A continuación se enuncian las ecuaciones adicionales para todos los tipos de falla.
Falla trifásica
Vax = Vbx = Vcx = 0 (2.8-16)
If a + If b + If c = 0 (2.8-17)
Falla trifásica a tierra
Vax = Vbx = Vcx = Vxg = 0 (2.8-18)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 29
Falla línea a línea
Se asume en este caso una falla entre las fases i y j, con la fase k sin falla
V ix = V jx = 0 (2.8-19)
If k = 0 (2.8-20)
If i + If j = 0 (2.8-21)
Falla línea a tierra
Se asume en este caso una falla en la fase k, las fases i y j están sin falla
Vkx = Vxg = 0 (2.8-22)
If i = If j = 0 (2.8-23)
La mejor forma de resolver las siete ecuaciones relacionadas con el estudio de
cortocircuito es plantear el sistema en forma matricial de la siguiente forma:
⎡ IPa ⎤ ⎡ 1 0 0 Y1,1 Y1, 2 Y1,3 Ys1 ⎤ ⎡ If a ⎤
⎢ IP ⎥ ⎢ 0 ⎢ ⎥
⎢ b⎥ ⎢ 1 0 Y2,1 Y2, 2 Y2,3 Ys2 ⎥⎥ ⎢ If b ⎥
⎢ IPc ⎥ ⎢ 0 0 1 Y3,1 Y3, 2 Y3,3 Ys3 ⎥ ⎢ If c ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥ (2.8-24)
⎢ 0 ⎥ = ⎢− − − − − − − ⎥ ⋅ ⎢Vax ⎥
⎢ 0 ⎥ ⎢− − − − − − − ⎥ ⎢Vbx ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ 0 ⎥ ⎢− − − − − − − ⎥ ⎢Vcx ⎥
⎢ 0 ⎥ ⎢−
⎣ ⎦ ⎣ − − − − − − ⎥⎦ ⎢⎣Vxg ⎥⎦
la ecuación (2.8-24) en forma compacta sería:
[IPabc ] = [C ]⋅ [X ] (2.8-25)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 30
Donde las entradas marcadas con un guión en la matriz [C] se reemplazarían una vez
dadas las condiciones de falla. Por ejemplo si se simula una falla trifásica se tendrían los
siguientes entradas en la matriz [C]: C4,4 = 1, C5,5 = 1, C6,6 = 1, C7,1 = 1, C7,2 = 1 y C7,3 = 1, el
resto de los guiones se reemplazaría por ceros.
Una vez definida la matriz [C], se procede a despejar el vector de soluciones:
[X ] = [C ]−1 ⋅ [IPabc ] (2.8-26)
así se obtiene el vector de soluciones con las corrientes de falla.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 31
3 CAPITULO 3: Estructura del programa
3.1 Ámbito de aplicación del programa ASDR
Refiérase a la Sección 2.1 del documento ASDR: Analizador de Sistemas de Distribución
Radiales (Versión 1.1) Manual de Usuario incluido en el apéndice del presente documento.
3.2 Consideraciones Iniciales
La consigna en el diseño del programa fue la de hacerlo lo más flexible y modular posible,
para ello se considero como primer punto la introducción de los datos del sistema.
Todos los elementos del sistema fueron considerados como elementos generalizados
caracterizados por una serie de datos almacenados dentro de una lista que constituye la
representación del elemento del sistema dentro del programa.
Todos los elementos del sistema entonces se pueden representar por medio del siguiente
esquema:
Figura 3.1 – Esquema de un elemento del sistema
Del esquema de la Figura 3.1 se nota que cada elemento del sistema está caracterizado por
una barra de origen, una barra destino y una serie de datos que dan las características del
elemento ubicado entre esas dos barras, esto aplica también para el caso de la fuente de energía,
en la cual se supone la barra de origen como la referencia del sistema
La estructura {Datos} incluye aparte de los datos del elemento, la ubicación del mismo
dentro del sistema, dicha ubicación queda definida por los números de barra origen y barra
destino. En general la estructura {Datos} tiene la siguiente configuración:
{Datos} = {Barra origen, Barra Destino, Tipo de Elemento, Otros Datos}
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 32
Como se nota la estructura datos consta de un arreglo de elementos que caracterizan al
dispositivo, ya sea una fuente de potencia, un transformador, una línea de distribución, un
compensador de tensión, etc. Para todos los elementos la primera entrada de datos corresponde
con la de barra de origen del elemento, la segunda con la de barra destino, con estos dos datos
queda definida la ubicación del elemento dentro del sistema; luego una tercer entrada indica el
tipo de elemento que se ubica entre esas dos barras, los demás datos que completan el arreglo
dependen del tipo de elemento que se trate pero en general constan de la matriz de impedancia de
fase del elemento, y las matrices constantes generalizadas. Todos los datos del elemento son
calculados por el programa y almacenados dentro del arreglo de datos para el mismo.
Los arreglos de datos de los elementos son almacenados a su vez dentro de un arreglo
mayor que contiene los datos de todo el sistema, este arreglo de datos del sistema es la
representación dentro del programa del sistema de distribución real. Este arreglo de datos del
sistema se toma como un archivo el cual se puede guardar para su uso posterior, se puede editar
para realizar modificaciones al mismo o se puede cargar en el programa para su utilización en
algún tipo de estudio, que en este caso en particular consiste en un cálculo de cortocircuito.
La ventaja del enfoque modular de los elementos al considerarlos como bloques
asociados para formar un sistema, consiste en que no es necesaria la introducción de los datos
siguiendo un orden en particular; así un usuario puede introducir primero los datos de las líneas y
luego de los demás elementos, o simplemente introducir los datos siguiendo una trayectoria
hacia un nodo específico, etc.
Otra ventaja del enfoque modular es que se puede construir cualquier tipo de topología
que se desee para el sistema; sin embargo hay que recordar que algoritmo del programa está
diseñado de tal forma que asume que el sistema en cuestión tiene una topología radial.
Cada uno de los elementos del sistema posee su propia interfaz con el usuario, de manera
tal que dependiendo del tipo de elemento que se desea introducir se puede acceder a la misma
donde se da la introducción de los datos característicos para el elemento en particular y el
programa calcula el resto de los datos y crea el arreglo de datos del elemento dentro de la
estructura de datos del sistema.
Una vez que la representación del sistema se encuentra dentro del programa se procede a
realizar el algoritmo de cálculo de las corrientes de cortocircuito, en el cual se asumieron las
siguientes condiciones:
1. La topología del sistema es radial con una única fuente de potencia en el mismo
2. Los compensadores de tensión trabajan en posición neutra y su impedancia es
despreciable
3. Las corrientes de las cargas son despreciables con respecto a las de cortocircuito
4. La matriz de impedancia equivalente entre la fuente y la barra en falla tomará
únicamente en consideración las impedancias en la trayectoria desde la fuente hasta la
barra en falla.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 33
3.3 Diagrama de flujo del programa
A continuación se muestra un breve diagrama de flujo donde se explica el funcionamiento
del mismo.
Figura 3.2 – Diagrama de flujo del programa
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 34
3.4 Uso del Programa
Refiérase al documento ASDR: Analizador de Sistemas de Distribución Radiales (Versión
1.1) Manual de Usuario incluido en el apéndice del presente documento.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 35
4 CAPITULO 4: Cálculos con el programa
4.1 Consideraciones iniciales
Luego de realizar la exposición de las generalidades del programa y su modo de empleo se
procede a realizar una serie de pruebas para cada uno de los módulos de los que está constituido.
Primero se procede a revisar los resultados del programa para una serie de elementos cuyos
valores se conocen de antemano, a fin de verificar la exactitud de los mismos; finalmente se
procede a revisar el desempeño del programa y los resultados obtenidos para un sistema en
particular.
4.2 Pruebas con líneas de distribución
4.2.1 Ejemplo 1
Se tiene la siguiente configuración:
2.5' 4.5'
a b c
3'
0.5'
4'
1'
25'
Figura 4.1 – Configuración ejemplo 1
Los datos para los conductores son:
Fases: Tipo 336,400 26/7 ACSR (Linnet)
Resistencia = 0.306 Ohms/milla
GMR = 0.0244 pies
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 36
Neutro: Tipo 4/0 6/1 ACSR
Resistencia = 0.5920 Ohms/milla
GMR = 0.00814 pies
Longitud de la línea = 2000 pies = 0.37887 millas
De acuerdo con la configuración y los datos del problema se obtiene la siguiente pantalla
que contiene los datos del problema y los resultados obtenidos mediante el programa:
Figura 4.2 – Datos para el problema y resultados del programa para el ejemplo 1
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 37
Tabla 4-1 Comparación de resultados para el ejemplo 1 (matriz zabc)
ASDR 1.1 Teórico % Diferencia
Entrada Real Imaginaria Real Imaginaria Real Imaginaria
1,1 0.45755 1.0781 0.4576 1.078 0.011 0.009
1,2 0.15595 0.50168 0.156 0.5017 0.032 0.004
1,3 0.15349 0.3849 0.1535 0.3849 0.007 0.000
2,1 0.15595 0.50168 0.156 0.5017 0.032 0.004
2,2 0.46663 1.0482 0.4666 1.0482 0.006 0.000
2,3 0.158 0.42365 0.158 0.4236 0.000 0.012
3,1 0.15349 0.38494 0.1535 0.3849 0.007 0.010
3,2 0.15801 0.42365 0.158 0.4236 0.006 0.012
3,3 0.46147 1.0651 0.4615 1.0651 0.007 0.000
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Teórico: Valores teóricos según [1].
% Diferencia: Porcentaje de diferencia de los valores obtenidos por el programa c on
respecto a los teóricos.
Entrada: Dato de la matriz en comparación siguiendo la convención: fila,columna.
Real: Valor de parte real
Imaginaria: Valor de la parte imaginaria.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 38
4.2.2 Ejemplo 2
Se tiene la siguiente configuración:
7'
a c
3'
4'
1'
25'
Figura 4.3 – Configuración ejemplo 2
Los datos para los conductores son:
Fases: Tipo 336,400 26/7 ACSR (Linnet)
Resistencia = 0.306 Ohms/milla
GMR = 0.0244 pies
Neutro: Tipo 4/0 6/1 ACSR
Resistencia = 0.5920 Ohms/milla
GMR = 0.00814 pies
Longitud de la línea = 2000 pies = 0.37887 millas
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 39
De acuerdo con la configuración y los datos del problema se obtiene la siguiente pantalla
que contiene los datos del problema y los resultados obtenidos mediante el programa:
Figura 4.4 – Datos para el problema y resultados del programa para el ejemplo 2
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 40
Tabla 4-2 Comparación de resultados para el ejemplo 2 (matriz zabc)
ASDR 1.1 Teórico % Diferencia
Entrada Real Imaginaria Real Imaginaria Real Imaginaria
1,1 0.45755 1.0781 0.4576 1.078 0.011 0.009
1,2 0 0 0 0 0 0
1,3 0.15349 0.38494 0.1535 0.3849 0.007 0.010
2,1 0 0 0 0 0 0
2,2 0 0 0 0 0 0
2,3 0 0 0 0 0 0
3,1 0.15349 0.38494 0.1535 0.3849 0.007 0.010
3,2 0 0 0 0 0 0
3,3 0.46147 1.0651 0.4615 1.0651 0.007 0.000
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Teórico: Valores teóricos según [1].
% Diferencia: Porcentaje de diferencia de los valores obtenidos por el programa c on
respecto a los teóricos.
Entrada: Dato de la matriz en comparación siguiendo la convención: fila,columna.
Real: Valor de parte real
Imaginaria: Valor de la parte imaginaria.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 41
4.2.3 Ejemplo 3
Se tiene la siguiente configuración:
b
5'
0.5'
25'
Figura 4.5 – Configuración ejemplo 3
Los datos para los conductores son:
Fases: Tipo 1/0 6/1 ACSR
Resistencia = 1.12 Ohms/milla
GMR = 0.00446 pies
Neutro: Tipo 1/0 6/1 ACSR
Resistencia = 1.12 Ohms/milla
GMR = 0.00446 pies
Longitud de la línea = 2000 pies = 0.37887 millas
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 42
De acuerdo con la configuración y los datos del problema se obtiene la siguiente pantalla
que contiene los datos del problema y los resultados obtenidos mediante el programa:
Figura 4.6 – Datos para el problema y resultados del programa para el ejemplo 3
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 43
Tabla 4-3 Comparación de resultados para el ejemplo 3 (matriz zabc)
ASDR 1.1 Teórico % Diferencia
Entrada Real Imaginaria Real Imaginaria Real Imaginaria
1,1 0 0 0 0 0 0
1,2 0 0 0 0 0 0
1,3 0 0 0 0 0 0
2,1 0 0 0 0 0 0
2,2 1.3292 1.3475 1.3292 1.3475 0.000 0.000
2,3 0 0 0 0 0 0
3,1 0 0 0 0 0 0
3,2 0 0 0 0 0 0
3,3 0 0 0 0 0 0
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Teórico: Valores teóricos según [1].
% Diferencia: Porcentaje de diferencia de los valores obtenidos por el programa c on
respecto a los teóricos.
Entrada: Dato de la matriz en comparación siguiendo la convención: fila,columna.
Real: Valor de parte real
Imaginaria: Valor de la parte imaginaria.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 44
4.3 Pruebas con transformadores
4.3.1 Ejemplo 4
Se tiene un transformador trifásico D-Y aterrizada de 5000 KVA, 138 kV-12.47 kV, con
una impedancia de 0.085∟85° pu.
Como el programa esta diseñado para trabajar con bancos trifásicos formados por
transformadores monofásicos en este caso la potencia trifásica total se debe dividir entre 3, para
obtener el transformador monofásico equivalente que constituiría parte del banco trifásico.
Potencia transformador monofásico equivalente = 5000 KVA/3 = 1667 KVA
La impedancia en pu se debe convertir a forma compleja rectangular:
0.085∟85° pu = 0.007408 + 0.0847j
De acuerdo con la configuración y los datos del problema se obtiene la siguiente pantalla
que contiene los datos del problema y los resultados obtenidos mediante el programa:
Figura 4.7 – Datos para el problema y resultados del programa para el ejemplo 4
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 45
Tabla 4-4 Comparación de resultados para el ejemplo 4
ASDR 1.1 Teórico % Diferencia
Entrada Real Imaginaria Real Imaginaria Real Imaginaria
Ztabc(1,1) 0.23034 2.6337 0.2304 2.6335 0.026 0.008
Ztabc(2,2) 0.23034 2.6337 0.2304 2.6335 0.026 0.008
Ztabc(2,3) 0.23034 2.6337 0.2304 2.6335 0.026 0.008
-
a(1,2) -12.7786 0 12.7786 0 0.000 0
a(2,1) -6.38928 0 -6.3893 0 0.000 0
a(2,2) 0 0 0 0 0 0
b(1,2) -2.94347 -33.6544 -2.9441 -33.6518 0.021 0.008
b(1.3) -1.47173 -16.8272 -1.4721 -16.8259 0.025 0.008
b(2,2) 0 0 0 0 0 0
d(1,1) 0.052171 0 0.0522 0 0.056 0
d(1,2) -0.05212 -0.0522 0 0.159 0
d(3,2) 0 0 0 0 0 0
A(1,1) 0.052171 0 0.0522 0 0.056 0
A(2,1) -0.05217 -0.0522 0 0.056 0
B(1,1) 0.23034 2.6337 0.2304 2.6335 0.026 0.008
B(2,2) 0.23034 2.6337 0.2304 2.6335 0.026 0.008
B(3,3) 0.23034 2.6337 0.2304 2.6335 0.026 0.008
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Teórico: Valores teóricos según [1].
% Diferencia: Porcentaje de diferencia de los valores obtenidos por el programa c on
respecto a los teóricos.
Entrada: Dato de la matriz en comparación siguiendo la convención: fila,columna.
Real: Valor de parte real
Imaginaria: Valor de la parte imaginaria.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 46
4.3.2 Ejemplo 5
Se tiene un banco trifásico Y-D formado por los siguientes transformadores monofásicos:
a-b: 100 KVA, 7200-240 V, 0.01+0.04j pu
b-c: 50 KVA, 7200-240 V, 0.015+0.035j pu
c-a: 50 KVA, 7200-240 V, 0.015+0.035j pu
Como el programa utiliza los valores línea-línea de tensión eso implica un valor de
7200*√3 = 12470 V para el primario del banco.
De acuerdo con la configuración y los datos del problema se obtiene la siguiente pantalla
que contiene los datos del problema y los resultados obtenidos mediante el programa:
Figura 4.8 – Datos para el problema y resultados del programa para el ejemplo 5
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 47
Tabla 4-5 Comparación de resultados para el ejemplo 5
ASDR 1.1 Teórico % Diferencia
Entrada Real Imaginaria Real Imaginaria Real Imaginaria
Ztabc(1,1) 0.00576 0.02304 0.0058 0.023 0.690 0.174
Ztabc(2,2) 0.01728 0.04032 0.017 0.0403 1.647 0.050
Ztabc(2,3) 0.01728 0.04032 0.017 0.0403 1.647 0.050
a(1,1) 29.9982 0 30 0 0.006 0
a(1,2) -29.9982 0 -30 0 0.006 0
a(2,1) 0 0 0 0 0 0
b(1,1) 0.057596 0.23039 0.058 0.23 0.697 0.170
b(2,1) 0.17279 0.40318 0.1728 0.4032 0.006 0.005
b(3,1) -0.34558 -0.80635 -0.3456 -0.8064 0.006 0.006
d(1,1) 0.011112 0 0.0111 0 0.108 0
d(2,2) 0.022224 0 0.0222 0 0.108 0
A(1,1) 0.022224 0 0.0222 0 0.108 0
A(1,2) 0.011112 0 0.0111 0 0.108 0
B(1,1) 0.0032 0.0096 0.0032 0.0096 0.000 0.000
B(1,2) 0.00256 0.00384 0.0026 0.0038 1.538 1.053
B(2,1) 0 0 0 0 0 0
B(2,2) 0.00576 0.01344 0.0058 0.0134 0.690 0.299
B(3,1) -0.00704 -0.01536 -0.007 -0.0154 0.571 0.260
B(3,2) -0.00448 -0.01152 -0.0045 -0.0115 0.444 0.174
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Teórico: Valores teóricos según [1].
% Diferencia: Porcentaje de diferencia de los valores obtenidos por el programa c on
respecto a los teóricos.
Entrada: Dato de la matriz en comparación siguiendo la convención: fila,columna.
Real: Valor de parte real
Imaginaria: Valor de la parte imaginaria.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 48
4.3.3 Ejemplo 6
Se tiene un banco trifásico D-D formado por los siguientes transformadores
monofásicos:
a-b: 100 KVA, 12470-240 V, 0.01+0.04j pu
b-c: 50 KVA, 12470-240 V, 0.015+0.035j pu
c-a: 50 KVA, 12470-240 V, 0.015+0.035j pu
De acuerdo con la configuración y los datos del problema se obtiene la siguiente pantalla
que contiene los datos del problema y los resultados obtenidos mediante el programa:
Figura 4.9 – Datos para el problema y resultados del programa para el ejemplo 6
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 49
Tabla 4-6 Comparación de resultados para el ejemplo 6
ASDR 1.1 Teórico % Diferencia
Entrada Real Imaginaria Real Imaginaria Real Imaginaria
Ztabc(1,1) 0.00576 0.02304 0.0058 0.023 0.690 0.174
Ztabc(2,2) 0.01728 0.04032 0.0173 0.0403 0.116 0.050
Ztabc(2,3) 0.01728 0.04032 0.0173 0.0403 0.116 0.050
a(1,1) 34.6389 0 34.6389 0 0.000 0
a(1,2) -17.3194 0 -17.3194 0 0.000 0
b(1,1) 0.21664 0.58305 0.2166 0.583 0.018 0.009
b(1,2) 0.082643 0.11527 0.0826 0.1153 0.052 0.026
b(3,1) -0.29928 -0.69832 -0.2993 -0.6983 0.007 0.003
A(1,1) 0.012831 0 0.0128 0 0.242 0
A(1,2) -0.00642 0 -0.0064 0 0.241 0
B(1,1) 0.004169 0.011221 0.0042 0.0112 0.729 0.188
B(2,1) 0.001591 0.002219 0.0016 0.0022 0.588 0.845
B(3,1) -0.00576 -0.01344 -0.0058 -0.0134 0.690 0.299
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Teórico: Valores teóricos según [1].
% Diferencia: Porcentaje de diferencia de los valores obtenidos por el programa c on
respecto a los teóricos.
Entrada: Dato de la matriz en comparación siguiendo la convención: fila,columna.
Real: Valor de parte real
Imaginaria: Valor de la parte imaginaria.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 50
4.3.4 Ejemplo 7
Se tiene un banco trifásico Y abierta-D abierta, formado por los siguientes
transformadores monofásicos:
a-b: 100 KVA, 7200-240 V, 0.01+0.04j pu
b-c: 50 KVA, 7200-240 V, 0.015+0.035j pu
Como el programa utiliza los valores línea-línea de tensión eso implica un valor de 7200*√3 =
12470 V para el primario del banco.
De acuerdo con la configuración y los datos del problema se obtiene la siguiente pantalla
que contiene los datos del problema y los resultados obtenidos mediante el programa:
Figura 4.10 – Datos para el problema y resultados del programa para el ejemplo 7
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 51
Tabla 4-7 Comparación de resultados para el ejemplo 7
ASDR 1.1 Teórico % Diferencia
Entrada Real Imaginaria Real Imaginaria Real Imaginaria
a(1,1) 29.9982 0 30 0 0.006 0
a(1,2) -29.9982 0 -30 0 0.006 0
b(1,1) 0.17279 0.69116 0.1728 0.6912 0.006 0.006
b(2,2) 0 0 0 0 0 0
b(2,3) -0.51837 -1.2095 -0.5184 -1.2096 0.006 0.008
d(1,1) 0.033335 0 0.0333 0 0.105 0
d(2,2) 0 0 0 0 0 0
d(2,3) -0.03334 0 -0.0333 0 0.105 0
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Teórico: Valores teóricos según [1].
% Diferencia: Porcentaje de diferencia de los valores obtenidos por el programa c on
respecto a los teóricos.
Entrada: Dato de la matriz en comparación siguiendo la convención: fila,columna.
Real: Valor de parte real
Imaginaria: Valor de la parte imaginaria.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 52
4.4 Pruebas con sistemas
4.4.1 Ejemplo 8
Se tiene el sistema de distribución radial representado por el siguiente diagrama unifilar:
Figura 4.11 – Diagrama unifilar ejemplo 8
Lo primero que se debe hacer es introducir los datos del sistema elemento por elemento.
Elemento 0-1: fuente de potencia
Los valores de tensión línea-neutro para la fuente son:
Van = 7200∟0°, Vbn = 7200∟-120°, Vcn = 7200∟120°
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 53
La interacción con el programa da como resultado:
Figura 4.12 – Ejemplo 8, elemento 0-1
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 54
Elemento 1-2: línea de distribución
Se tiene la siguiente configuración:
Figura 4.13 – Configuración ejemplo 8, elemento 1-2
Los datos para los conductores son:
Fases: Tipo 336,400 26/7 ACSR (Linnet)
Resistencia = 0.306 Ohms/milla
GMR = 0.0244 pies
Longitud de la línea = 2000 pies = 0.37887 millas
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 55
La interacción con el programa da como resultado:
Figura 4.14 – Ejemplo 8, elemento 1-2
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 56
Elemento 2-3: transformador D-Y aterrizada
Se tiene un banco trifásico D-Y aterrizada formado por los siguientes transformadores
monofásicos:
a-b: 2000 KVA, 12470-2400 V, 0.01+0.06j pu
b-c: 2000 KVA, 12470-2400 V, 0.01+0.06j pu
c-a: 2000 KVA, 12470-2400 V, 0.01+0.06j pu
Como el programa utiliza los valores línea-línea de tensión eso implica un valor de
2400*√3 = 4157 V para el secundario del banco.
La interacción con el programa da como resultado:
Figura 4.15 – Ejemplo 8, elemento 2-3
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 57
Elemento 3-4: línea de distribución
Se tiene la siguiente configuración:
Figura 4.16 – Configuración ejemplo 8, elemento 3-4
Los datos para los conductores son:
Fases: Tipo 336,400 26/7 ACSR (Linnet)
Resistencia = 0.306 Ohms/milla
GMR = 0.0244 pies
Neutro: Tipo 4/0 6/1 ACSR
Resistencia = 0.5920 Ohms/milla
GMR = 0.00814 pies
Longitud de la línea = 2500 pies = 0.4736 millas
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 58
La interacción con el programa da como resultado:
Figura 4.17 – Ejemplo 8, elemento 3-4
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 59
Elemento 2-5: transformador D-D
Se tiene un banco trifásico D-D formado por los siguientes transformadores monofásicos:
a-b: 2000 KVA, 12470-2400 V, 0.01+0.06j pu
b-c: 2000 KVA, 12470-2400 V, 0.01+0.06j pu
c-a: 3000 KVA, 12470-2400 V, 0.006+0.005j pu
La interacción con el programa da como resultado:
Figura 4.18 – Ejemplo 8, elemento 2-5
Elemento 5-6: línea de distribución
Este elemento es idéntico al elemento 1-2 (línea de distribución D)
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 60
Estudio de cortocircuito 1
Una vez que los datos del sistema se hallan en el programa se pueden guardar en un
archivo como se ha expuesto con anterioridad. Se realiza entonces un análisis de cortocircuito en
el sistema suponiendo una falla de línea a – línea b, con una matriz de impedancia de falla
despreciable en la barra 4.
Los resultados obtenidos con el programa son:
Figura 4.19 – Ejemplo 8, estudio cortocircuito 1
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 61
Tabla 4-8 Comparación de resultados para el ejemplo 8, estudio de cortocircuito 1
% Diferencia
ASDR 1.1 Teórico ASDR 1.1
Entrada Mag Ángulo Mag Ángulo Mag Ángulo
Ifa 4149.492 -68.121 4193.16 -69.6997 1.041 2.265
Ifb 4149.492 111.879 4193.16 110.3 1.041 1.432
Ifc 0 0 0 41.1286 0.000 100.000
Vax 0 176.2483 0 104 0.000 69.470
Vbx 0 0 0 -105.52 0.000 100.000
Vcx 3649.653 88.1459 3648.32 88.102 0.037 0.050
Vxg 1222.406 -91.4375 1217.88 -91.6335 0.372 0.214
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Teórico: Valores teóricos según [1].
% Diferencia ASDR 1.1: Porcentaje de diferencia de los valores obtenidos por el
programa ASDR 1.1 con respecto a los teóricos.
Entrada: Ifa = corriente de falla para la fase a (A),
Ifb = corriente de falla para la fase b (A),
Ifc = corriente de falla para la fase c (A),
Vax = Tensión de la fase a respecto al punto de falla (V),
Vbx = Tensión de la fase b respecto al punto de falla (V),
Vcx = Tensión de la fase c respecto al punto de falla (V),
Vxg = Voltaje del punto de falla respecto a tierra (V).
Mag: Magnitud del valor ya sea en amperios (A) o volitos (V) según sea el caso.
Ángulo: Ángulo en grados eléctricos.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 62
Estudio de Cortocircuito 2
Se realiza entonces un análisis de cortocircuito en el sistema suponiendo una falla
trifásica, con una matriz de impedancia de falla despreciable en la barra 6.
La interacción con el programa da como resultado:
Figura 4.20 – Ejemplo 8, estudio cortocircuito 2
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 63
Tabla 4-9 Resultados para el ejemplo 8, estudio de cortocircuito 2
ASDR 1.1
Entrada Mag Angulo
Ifa 4703.393 -63.3997
Ifb 4595.058 172.2209
Ifc 4339.212 55.6759
Vax 0 0
Vbx 0 0
Vcx 0 116.2782
Vxg 59.8528 117.96
donde:
ASDR 1.1: Datos obtenidos mediante el programa ASDR 1.1
Entrada: Ifa = corriente de falla para la fase a (A),
Ifb = corriente de falla para la fase b (A),
Ifc = corriente de falla para la fase c (A),
Vax = Tensión de la fase a respecto al punto de falla (V),
Vbx = Tensión de la fase b respecto al punto de falla (V),
Vcx = Tensión de la fase c respecto al punto de falla (V),
Vxg = Voltaje del punto de falla respecto a tierra (V).
Mag: Magnitud del valor ya sea en amperios (A) o volitos (V) según sea el caso.
Ángulo: Ángulo en grados eléctricos.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 64
5 CAPÍTULO 5: Conclusiones y recomendaciones
A continuación se presentan las conclusiones más relevantes obtenidas del trabajo realizado
así como algunas recomendaciones de interés.
1. El algoritmo del programa funciona de manera apropiada tal y como se diseño. La
consigna de un programa modular y flexible para el análisis de los sistemas de
distribución se obtuvo de manera que el usuario puede construir cualquier
topología para el sistema con la única restricción de que la misma sea radial.
2. El programa es capaz de almacenar y cargar los datos del sistema lo cual facilita
el trabajo con el mismo, y sobre todo se obtuvo una interfaz amigable para el
usuario, el cual de manera casi intuitiva puede entender y manipular las diferentes
pantallas del software.
3. El uso del software es sencillo y directo de manera que se pueden obtener los
resultados de manera rápida y simple.
4. La variedad de estudios de cortocircuito que el usuario puede realizar cubre la
totalidad de los casos; esto se debe al enfoque teórico del programa el cual
diverge de los métodos tradicionales como el de componentes simétricas, el cual
para todos los efectos no queda bien situado dentro de los sistemas de
distribución.
5. Los datos calculados para los diversos elementos que integran el sistema de
distribución son consecuentes con la teoría, y se observa que sus resultados son
correspondientes.
6. Se observa de los resultados obtenidos que el efecto de acople desigual entre las
fases produce resultados diferentes para las corrientes de las diversas fases, aún
para el caso de fallas simétricas como el cortocircuito trifásico.
7. En general los resultados obtenidos con el programa se ajustan a lo predicho por
la teoría y la facilidad de análisis de los diversos sistemas mediante el uso del
programa es evidente.
8. El programa se puede optimizar mucho más, de forma tal que permita editar los
datos para un elemento particular del sistema, además se pueden integrar rutinas
de generación de reportes y conexión con bases de datos para registrar las
variables de interés durante los estudios.
9. La principal mejora que se puede implementar para el programa es la ejecución de
otro tipo de estudios como los de flujo de carga o de estabilidad de tensión, entre
otros; esto podría realizarse para versiones posteriores del programa.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 65
BIBLIOGRAFÍA
1. Kersting, W. H. Distribution System Modeling and Analysis, Edition [1] , CRC Press,
England, 2002.
2. Kersting, W. H. Modeling and Analysis of Rural Electric Distribution Feeders, IEEE
Transactions on Industry applications, United States of America, Vol [28] N° [4],
August 1992; pages 767-773.
3. IEEE Distribution Planning Working Group Report. Radial Distribution Test Feeders,
Transactions on Power Systems, United States of America, Vol [6] N° [3], August
1991; pages 975-985.
4. Kersting, W. H. Distribution System Short Circuit Analysis, 25th Intersociety Energy
Conversion Engineering Conference, United States of America, August 12-17, 1990;
pages 310-315.
5. KRON, G. Tensorial analysis of integrated transmission systems: Part I, the six basic
reference frames. AIEE Transactions, United States of America, Vol [71], 1952.
6. CARSON, JOHN R. Wave propagation in overhead wires with ground return. Bell
System Technical Journal, United States of America, New York, Vol [5], 1926.
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 66
APÉNDICES
Diciembre del 2004
IE-0502 Cálculo de Corrientes de Cortocircuito en Redes Eléctricas de Distribución 67
ANEXOS
Diciembre del 2004
También podría gustarte
- 2 Aplicaciones de 1aporteDocumento3 páginas2 Aplicaciones de 1aporteWitman André Robles LópezAún no hay calificaciones
- NMX J 284 AnceDocumento62 páginasNMX J 284 AnceAva Alonser100% (2)
- Generadores Electricos - LaboratorioDocumento6 páginasGeneradores Electricos - LaboratorioBRUNO APAZA APAZA0% (1)
- Analisis de Riesgo de IzajeDocumento12 páginasAnalisis de Riesgo de IzajeLuis Palleros100% (3)
- Resumen UltrasonidoooDocumento25 páginasResumen UltrasonidoooLuis Espinoza AramburúAún no hay calificaciones
- Investigacion de Momentos de Inercia - Gabriela Rodríguez ReyesDocumento3 páginasInvestigacion de Momentos de Inercia - Gabriela Rodríguez ReyesGaby Rodríguez ReyesAún no hay calificaciones
- Laboratorio Termo v3Documento41 páginasLaboratorio Termo v3r4fa91Aún no hay calificaciones
- FISICA Caida Libre 11.10.18Documento3 páginasFISICA Caida Libre 11.10.18LIBROS33% (3)
- 1.1.-Consideraciones Teóricas PDFDocumento39 páginas1.1.-Consideraciones Teóricas PDFJorge CalAún no hay calificaciones
- CuestionarioDocumento4 páginasCuestionarioLorena López50% (2)
- ViscosidadDocumento7 páginasViscosidadFuentes Santana AurelioAún no hay calificaciones
- Correlación y Coherencia EEGDocumento8 páginasCorrelación y Coherencia EEGKresnik RosenAún no hay calificaciones
- Trabajo de QuímicaDocumento7 páginasTrabajo de QuímicadelaespadakeyAún no hay calificaciones
- A Raja TablaDocumento70 páginasA Raja TablaMauricio GalindoAún no hay calificaciones
- Moo s05 PPT Dinamica LinealDocumento17 páginasMoo s05 PPT Dinamica LinealLeydy DianaAún no hay calificaciones
- lEYES DE KIRCHHOFFDocumento6 páginaslEYES DE KIRCHHOFFFredMaxAún no hay calificaciones
- Ru 2023 2 Física S3Documento8 páginasRu 2023 2 Física S3Roberto GomezAún no hay calificaciones
- As Ignacio Nde GasesDocumento25 páginasAs Ignacio Nde GasespotroavernoAún no hay calificaciones
- Emi Hoja de Preguntas Primer Parcial Resv - III 2017Documento15 páginasEmi Hoja de Preguntas Primer Parcial Resv - III 2017Tadeo ChoqueAún no hay calificaciones
- Examen 1 UnidadDocumento4 páginasExamen 1 UnidadELDER JOSUE EFRAIN CAAL FIGUEROAAún no hay calificaciones
- Campo Vectoriales y EscalarasDocumento10 páginasCampo Vectoriales y EscalarasAnthony López HuamanAún no hay calificaciones
- S09.s1 - Tarea Calculo para Toma de DecisionesDocumento3 páginasS09.s1 - Tarea Calculo para Toma de DecisionesOmar OSAún no hay calificaciones
- Ecuacion de ShodinguerDocumento66 páginasEcuacion de ShodinguerJared HcAún no hay calificaciones
- Tpn1y2 FISICA NES B 2023Documento46 páginasTpn1y2 FISICA NES B 2023jaquelinAún no hay calificaciones
- Temas Selectos de QuimicaDocumento4 páginasTemas Selectos de QuimicaNoemi Hernandez VazquezAún no hay calificaciones
- Campo EléctricoDocumento11 páginasCampo EléctricoCelso Diaz RiveraAún no hay calificaciones
- Calculo de Porcentaje de Planchas Traslucidas en Naves IndustrialesDocumento6 páginasCalculo de Porcentaje de Planchas Traslucidas en Naves IndustrialesRicardoMallmaAún no hay calificaciones
- Mecanica de FluidosDocumento3 páginasMecanica de FluidosDavid Arévalo SalazarAún no hay calificaciones
- Ensayo de TermodinamicaDocumento3 páginasEnsayo de TermodinamicaMARCOS ALEJANDRO MACIAS MACIASAún no hay calificaciones
- Tarea 14Documento3 páginasTarea 14Beatriz NMAún no hay calificaciones