También podría gustarte
- EsIA Expost Planta Faenadora AVISIDDocumento424 páginasEsIA Expost Planta Faenadora AVISIDRiley Bradford100% (1)
- Etapa 1 de 23Documento15 páginasEtapa 1 de 23Jonaykher Johann Oro Bobadilla100% (1)
- C# para Programadores de VB6Documento90 páginasC# para Programadores de VB6Luis Enrique Stobschinski100% (1)
- 456789Documento8 páginas45678945482721Aún no hay calificaciones
- Reclutamiento y Seleccion de PersonalDocumento33 páginasReclutamiento y Seleccion de PersonalJorgeLeiva100% (5)
- Sesión 1 C y T - El Crecimiento de Las PlantasDocumento6 páginasSesión 1 C y T - El Crecimiento de Las PlantasSaniht RamirezAún no hay calificaciones
- 07 Aritmetica 3Documento20 páginas07 Aritmetica 3Yuli Baldera C hapoñanAún no hay calificaciones
- Asis CajamarcaDocumento9 páginasAsis CajamarcaMirzaAstopilcoAún no hay calificaciones
- Normas Sanitarias PDFDocumento267 páginasNormas Sanitarias PDFConnie Brooks50% (4)
- Probl Distribuciones PDFDocumento104 páginasProbl Distribuciones PDFBriones LuisAún no hay calificaciones
- Tesis - Destilacion - Control LogixDocumento62 páginasTesis - Destilacion - Control LogixAlonso SanchezAún no hay calificaciones
- Stronger Kids PipDocumento1 páginaStronger Kids PipjavitapazvuAún no hay calificaciones
- Conversaciones Con Francisco Nuñez Del ArcoDocumento2 páginasConversaciones Con Francisco Nuñez Del Arcocohhiba8083Aún no hay calificaciones
- Ficha Descriptiva Del AlumnoDocumento26 páginasFicha Descriptiva Del AlumnoItzel Lorena78% (69)
- Informe Nivel AutomaticoDocumento39 páginasInforme Nivel AutomaticonbarsayaAún no hay calificaciones
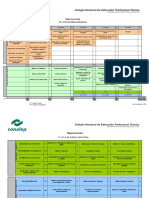
- Mapa Curricular Quimica IndustrialDocumento2 páginasMapa Curricular Quimica IndustrialGerard JuarezAún no hay calificaciones
- Vision de Una MepresaDocumento7 páginasVision de Una MepresaRoxana Roxi Salas LauraAún no hay calificaciones
- Practica 2 - Prueba de Hipotesis de Una MuestraDocumento2 páginasPractica 2 - Prueba de Hipotesis de Una MuestraEdwis Francisco Vasquez50% (2)
- UNIDAD 4 ProcesosDocumento7 páginasUNIDAD 4 ProcesosNADIA GISELLEAún no hay calificaciones
- PR Cafe LebrijaDocumento0 páginasPR Cafe LebrijaandabrilAún no hay calificaciones
- E-12 Tabla GeomecanicaDocumento2 páginasE-12 Tabla GeomecanicaNicolas AlarconAún no hay calificaciones
- Guia de Analisis para El Desarrollo Tematico de La Investigacion ProgramaticaDocumento3 páginasGuia de Analisis para El Desarrollo Tematico de La Investigacion ProgramaticaSamuel ChavezAún no hay calificaciones
- 3.4 Distribuciones Derivadas Del MuestreoDocumento18 páginas3.4 Distribuciones Derivadas Del MuestreoJuan DavidAún no hay calificaciones
- Instrucciones Formulario PDFDocumento2 páginasInstrucciones Formulario PDFDaniel RuizAún no hay calificaciones
- SEMANA 3 - Tablero de Distribución Monofásica, Interruptores DiferencialesDocumento16 páginasSEMANA 3 - Tablero de Distribución Monofásica, Interruptores DiferencialesFidelAún no hay calificaciones
- Tarea 6. Generalidades de La CartografiaDocumento4 páginasTarea 6. Generalidades de La Cartografiascavega8Aún no hay calificaciones
- Importancia de Topografia en Proyectos de Infraestructura VialDocumento11 páginasImportancia de Topografia en Proyectos de Infraestructura Vialjavier roque fabiaAún no hay calificaciones
- Repertorio MusicalDocumento19 páginasRepertorio MusicalZenobio MPAún no hay calificaciones
- 2 - Calculo Mecanico BT CAAIDocumento7 páginas2 - Calculo Mecanico BT CAAIMendoza LilianaAún no hay calificaciones
- UniqueDocumento18 páginasUniqueCarlos Enrique Fernandez CurayAún no hay calificaciones