También podría gustarte
- Metodología de Trabajo Con Las Niñas y Niños Preescolares - Leonor CerdaDocumento260 páginasMetodología de Trabajo Con Las Niñas y Niños Preescolares - Leonor Cerdakamipipo100% (4)
- Circuito de Entrenamiento de 8 Estaciones A Tiempo FijoDocumento10 páginasCircuito de Entrenamiento de 8 Estaciones A Tiempo FijoAlexander Brooks54% (13)
- Estequiometria de La GasolinaDocumento31 páginasEstequiometria de La GasolinaBryan Guazhima50% (2)
- Primer Parcial TraumatologíaDocumento3 páginasPrimer Parcial TraumatologíaIsrael VenturaAún no hay calificaciones
- Partes de La MarimbaDocumento7 páginasPartes de La MarimbaSwitchfoot TiuAún no hay calificaciones
- Reglamento BPM Comunidad AndinaDocumento22 páginasReglamento BPM Comunidad AndinaChristian PalaciosAún no hay calificaciones
- FISH!, Parte 1 de 5Documento10 páginasFISH!, Parte 1 de 5Yussell MontalvoAún no hay calificaciones
- Molino de Bolas SMyMDocumento4 páginasMolino de Bolas SMyMDaniel Cano SuarezAún no hay calificaciones
- AUDITORIADocumento5 páginasAUDITORIAJhos Ccora MayhuaAún no hay calificaciones
- Trabajo MediosDocumento46 páginasTrabajo MediosGuillermo Pomalaya FernandezAún no hay calificaciones
- Morfologia Tema NR 1 NomenclaturaDocumento37 páginasMorfologia Tema NR 1 NomenclaturaYESSICA SEQUERAAún no hay calificaciones
- 2.2 Hombro Actualización en El Manejo Kinésico de HombroDocumento20 páginas2.2 Hombro Actualización en El Manejo Kinésico de Hombrojoseline2014Aún no hay calificaciones
- 2 MruDocumento5 páginas2 MruMamerto CalizayaAún no hay calificaciones
- Órganos Genitales FemeninosDocumento12 páginasÓrganos Genitales Femeninosapi-3828621100% (3)
- Práctico Funciones de Primer GradoDocumento3 páginasPráctico Funciones de Primer GradoTote TochettiAún no hay calificaciones
- PDF Determinacion de Alcalinidad en Sal de SodaDocumento10 páginasPDF Determinacion de Alcalinidad en Sal de SodaKerly MendozaAún no hay calificaciones
- Pilates CadillacDocumento4 páginasPilates Cadillacjessica Lujan perezAún no hay calificaciones
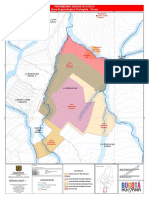
- Mapa Usme IDPC Areas ProtegidasDocumento1 páginaMapa Usme IDPC Areas ProtegidasYeinner Andres Lopez NarvaezAún no hay calificaciones
- Component Es Inter No S CpuDocumento21 páginasComponent Es Inter No S CpuASISTENTE ADMINISTRATIVOAún no hay calificaciones
- Protocolo LoRaWANDocumento21 páginasProtocolo LoRaWANDavid Orjuela100% (2)
- Practica Calificada 05Documento3 páginasPractica Calificada 05Einstein VargasAún no hay calificaciones
- Desarrollo de Sesiones - Bartender N1Documento2 páginasDesarrollo de Sesiones - Bartender N1Daniel EstremadoyroAún no hay calificaciones
- Diagnostico 2Documento5 páginasDiagnostico 2Yuliana Martínez de la RosaAún no hay calificaciones
- Formato Libreto EL MISTERIO DEDocumento6 páginasFormato Libreto EL MISTERIO DEAlejandra JaramilloAún no hay calificaciones
- Tema, Motivo y Tópico.Documento28 páginasTema, Motivo y Tópico.Silvana Sotelo GómezAún no hay calificaciones
- Evaluacion Capacidad Termica de Un Radiador de CalorDocumento6 páginasEvaluacion Capacidad Termica de Un Radiador de CalorChristopher GuevaraAún no hay calificaciones
- Dan Flavin y ObrasDocumento11 páginasDan Flavin y ObrasAlison FernandezAún no hay calificaciones
- V64-V65 Esp 1 PDFDocumento8 páginasV64-V65 Esp 1 PDFRafael BrunoAún no hay calificaciones
- R.U.C.: Factura: Vencimiento: 02/05/2023 Direccion: MachalaDocumento2 páginasR.U.C.: Factura: Vencimiento: 02/05/2023 Direccion: MachalaOmar AndradeAún no hay calificaciones
- O6, Optimizacion EnteraDocumento7 páginasO6, Optimizacion EnteraSilver PlatthaAún no hay calificaciones