También podría gustarte
- TAREA9 LT BARRENO Ecua de Estado y Vano DesniveladoDocumento10 páginasTAREA9 LT BARRENO Ecua de Estado y Vano DesniveladoLuis Miguel BarrenoAún no hay calificaciones
- Control IndustrialDocumento6 páginasControl IndustrialLuis Miguel BarrenoAún no hay calificaciones
- Informe Segundo ParcialDocumento9 páginasInforme Segundo ParcialLuis Miguel BarrenoAún no hay calificaciones
- ElectroneumaticaDocumento5 páginasElectroneumaticaLuis Miguel BarrenoAún no hay calificaciones
- T MagicaDocumento3 páginasT MagicaLuis Miguel BarrenoAún no hay calificaciones
- Derivadas NumericaDocumento21 páginasDerivadas NumericaSoledad CárdenasAún no hay calificaciones
- Barreno Luis Ensayo Circuitos IntegradosDocumento2 páginasBarreno Luis Ensayo Circuitos IntegradosLuis Miguel BarrenoAún no hay calificaciones
- Vander MondeDocumento11 páginasVander MondeLuis Miguel BarrenoAún no hay calificaciones
- ElectromagnetismoDocumento7 páginasElectromagnetismoLuis Miguel BarrenoAún no hay calificaciones
- Vander MondeDocumento11 páginasVander MondeLuis Miguel BarrenoAún no hay calificaciones
- Ejercicio 1Documento4 páginasEjercicio 1Luis Miguel BarrenoAún no hay calificaciones
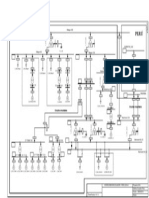
- DIgSILENT Ecuador PeruDocumento1 páginaDIgSILENT Ecuador PeruLuis Miguel BarrenoAún no hay calificaciones
- Barreno LuisDocumento19 páginasBarreno LuisLuis Miguel BarrenoAún no hay calificaciones