También podría gustarte
- t5 - Tabla Comparativa Software de SimulaciónDocumento6 páginast5 - Tabla Comparativa Software de SimulaciónGuadalupe Castro Esparza100% (1)
- Plan de Trabajo Auditoría de Las Aplicaciones - EjemploDocumento7 páginasPlan de Trabajo Auditoría de Las Aplicaciones - EjemploArgon87Aún no hay calificaciones
- Stat FitDocumento10 páginasStat FitRosa Johanna Ramos Soto0% (1)
- Taller de Generación de Números Aleatorios (2017!07!11 21-22-14 UTC)Documento3 páginasTaller de Generación de Números Aleatorios (2017!07!11 21-22-14 UTC)David Bustos UstaAún no hay calificaciones
- Módulo de cinemática DMU de Catia V5De EverandMódulo de cinemática DMU de Catia V5Calificación: 5 de 5 estrellas5/5 (1)
- Guia MedicionDocumento4 páginasGuia MedicionKarlo ContrerasAún no hay calificaciones
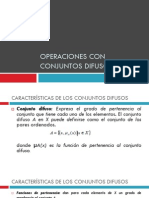
- Operaciones Con Conjuntos DifusosDocumento20 páginasOperaciones Con Conjuntos DifusosAlanSaucedoAún no hay calificaciones
- Metodos Basados en El Descuento de Flujoso DinamicosDocumento6 páginasMetodos Basados en El Descuento de Flujoso DinamicosEduardo Daniel Barros GarciaAún no hay calificaciones
- Cadenas de MarkovDocumento18 páginasCadenas de MarkovLeslie Lima PalaciosAún no hay calificaciones
- Heuristica y Metaheuristica Aplicadas en Logistica y ProducciònDocumento22 páginasHeuristica y Metaheuristica Aplicadas en Logistica y ProducciònCesar Augusto Rovira CabezasAún no hay calificaciones
- Documentación Metodologia ScrumDocumento10 páginasDocumentación Metodologia ScrumwellisAún no hay calificaciones
- Investigacion Rapid MinerDocumento6 páginasInvestigacion Rapid MinerEmmanuel Duarte FuentesAún no hay calificaciones
- ThroughputDocumento15 páginasThroughputFelipe VargasAún no hay calificaciones
- Método Simplex y DualDocumento16 páginasMétodo Simplex y DualRandy Beltran MartinezAún no hay calificaciones
- 12-Generación de Números AleatoriosDocumento36 páginas12-Generación de Números AleatoriosNircarlomix OrtegaAún no hay calificaciones
- Caso de Aplicación Líneas de Espera - Correa, Cuyato, Guzman, MorenoDocumento7 páginasCaso de Aplicación Líneas de Espera - Correa, Cuyato, Guzman, MorenoISABELLA SERNA GUZMANAún no hay calificaciones
- FuzzificacionDocumento18 páginasFuzzificacionLuis GarciaAún no hay calificaciones
- Tema 5Documento99 páginasTema 5Santiago MorenoAún no hay calificaciones
- Trabajo de Programacion LinealDocumento21 páginasTrabajo de Programacion LinealVeronica GuerreroAún no hay calificaciones
- IA - Clase 2020 Sistemas Expertos PROLOGDocumento46 páginasIA - Clase 2020 Sistemas Expertos PROLOGGabriela Elizabeth Figueroa RiquelmeAún no hay calificaciones
- DESARROLLO - Modelos de Optimización.Profesor.F. ParedesDocumento4 páginasDESARROLLO - Modelos de Optimización.Profesor.F. ParedesBastianAlejandroLopezAún no hay calificaciones
- Manual de Simulación (ITLaguna 2018)Documento81 páginasManual de Simulación (ITLaguna 2018)Linda Martínez RodríguezAún no hay calificaciones
- Guía Didáctica Investigación de Operaciones 1Documento13 páginasGuía Didáctica Investigación de Operaciones 1Claudia GuillenAún no hay calificaciones
- Sales Prediction Based On Machine Learning - En.esDocumento6 páginasSales Prediction Based On Machine Learning - En.esjohanAún no hay calificaciones
- Formulación de Modelos de SimulaciónDocumento6 páginasFormulación de Modelos de SimulaciónflfgomezAún no hay calificaciones
- Modulo 6 Estrategia de Procesos y CapacidadDocumento21 páginasModulo 6 Estrategia de Procesos y Capacidadleo100% (1)
- Investigacion de OperacionesDocumento39 páginasInvestigacion de OperacionesAlbertho DsilvaAún no hay calificaciones
- Ejemplo Simulacion InventarioDocumento130 páginasEjemplo Simulacion InventarioJose De CuentasAún no hay calificaciones
- Semana 2 - Modulo1 - SIMSISSDocumento14 páginasSemana 2 - Modulo1 - SIMSISSronaldo ryesAún no hay calificaciones
- Invg Operaciones - 2aed - 02 PDFDocumento40 páginasInvg Operaciones - 2aed - 02 PDFCruz Montes Ma de los AAún no hay calificaciones
- Caja NegraDocumento6 páginasCaja NegraRaul Roberto KoyocAún no hay calificaciones
- Sistema Jalar EmpujarDocumento3 páginasSistema Jalar EmpujarDiego JavierAún no hay calificaciones
- Apuntes de Investigacion Operativa PDFDocumento73 páginasApuntes de Investigacion Operativa PDFIng. Oscar Rojas HernandezAún no hay calificaciones
- Punto de Equilibrio Del MercadoDocumento3 páginasPunto de Equilibrio Del MercadoCarlos OchoaAún no hay calificaciones
- Metodologia de Los Sistemas SuavesDocumento11 páginasMetodologia de Los Sistemas SuavesAlejandro Molina0% (1)
- Metodo ModiDocumento12 páginasMetodo ModiMIGUEL JOSEPHY DIAZ OSORIOAún no hay calificaciones
- Componentes de Sistemas ExpertosDocumento40 páginasComponentes de Sistemas ExpertosEder Jasvir Vela Armas100% (1)
- Distribuciones de ProbabilidadDocumento81 páginasDistribuciones de ProbabilidadAndrea ParedesAún no hay calificaciones
- T03 MulticolinealidadDocumento21 páginasT03 Multicolinealidadapi-3735749100% (2)
- Diagrama de ForresterDocumento19 páginasDiagrama de ForresterGeo RuizAún no hay calificaciones
- Intro Al Universo de La Propiedad IntelectualDocumento44 páginasIntro Al Universo de La Propiedad IntelectualFoxStarkAún no hay calificaciones
- Cuaderno Problemas Estadistica ESI 14 - 15 PDFDocumento251 páginasCuaderno Problemas Estadistica ESI 14 - 15 PDFLeyre Allende0% (1)
- Practica de LingoDocumento12 páginasPractica de LingoArnaldo Alvarado Ruiz100% (1)
- Unidad 2 Numeros AleatoriosDocumento51 páginasUnidad 2 Numeros AleatoriosYenn MAún no hay calificaciones
- Desarrollo de La SimulaciónDocumento8 páginasDesarrollo de La SimulaciónFernanda ReyesAún no hay calificaciones
- Modelos DeterminísticosDocumento7 páginasModelos DeterminísticosJacke VillagranAún no hay calificaciones
- Guía, Análisis de La Línea de EsperaDocumento9 páginasGuía, Análisis de La Línea de Esperakevin giovanny porras taipeAún no hay calificaciones
- Manual de Automatizacion y Robotica 2009 Uteq 77Documento85 páginasManual de Automatizacion y Robotica 2009 Uteq 77victormorales21Aún no hay calificaciones
- Jimmy Mendoza Sofwar de ArenaDocumento13 páginasJimmy Mendoza Sofwar de ArenaJimmyAún no hay calificaciones
- Pronostico DefinitivoDocumento8 páginasPronostico DefinitivogiancarlolibrerosAún no hay calificaciones
- PPCYMDocumento8 páginasPPCYMCruz Cruz0% (1)
- Any LogicDocumento9 páginasAny LogicBenjamin RamirezAún no hay calificaciones
- Investigación de Operaciones en AdministraciónDocumento549 páginasInvestigación de Operaciones en AdministraciónKarla VelázquezAún no hay calificaciones
- Control Fuzzy de Iluminación Mediante MATLABDocumento8 páginasControl Fuzzy de Iluminación Mediante MATLABjlqykAún no hay calificaciones
- David Vázquez González (Presentación)Documento23 páginasDavid Vázquez González (Presentación)MARCO ANTONIOAún no hay calificaciones
- Informe Proyecto Robotino PDFDocumento9 páginasInforme Proyecto Robotino PDFSergio VeraAún no hay calificaciones
- Control Motor DC - Logica DifusaDocumento3 páginasControl Motor DC - Logica DifusaFelipe OchoaAún no hay calificaciones
- Herramienta Matlab Robot ManipuladorDocumento6 páginasHerramienta Matlab Robot ManipuladorLuis PinajotaAún no hay calificaciones
- Logica Difusa PC1Documento17 páginasLogica Difusa PC1KevinAún no hay calificaciones
- Manejo de IncertidumbreDocumento12 páginasManejo de IncertidumbreOscar RodríguezAún no hay calificaciones
- Trabajo PLC Con Logica FuzziDocumento17 páginasTrabajo PLC Con Logica FuzziDaniel AraujoAún no hay calificaciones
- TallerDocumento28 páginasTallerJaime Hernández NovoaAún no hay calificaciones
- Cuestionario Grado DecimoDocumento18 páginasCuestionario Grado Decimojhonalex5j3Aún no hay calificaciones
- Adobe Photoshop CCDocumento13 páginasAdobe Photoshop CCkaoskulturalAún no hay calificaciones
- Manual C++6.0Documento571 páginasManual C++6.0Aramis ScabottAún no hay calificaciones
- CV AlmacenDocumento3 páginasCV AlmacenAnonymous QxwTybAún no hay calificaciones
- Qué Es Un Sistema de Información GeográficaDocumento15 páginasQué Es Un Sistema de Información GeográficaCésar Castillo ChúAún no hay calificaciones
- Algoritmos GrafosDocumento16 páginasAlgoritmos GrafosJosé Miguel Erazo AyónAún no hay calificaciones
- Trabajo Practico de Protocolo de Redes de DatosDocumento6 páginasTrabajo Practico de Protocolo de Redes de DatosAna CaminoAún no hay calificaciones
- Informe Mejora de Productos y Procesos Con La Incorporación de TIC. GA1-220501046-AA3-EV01Documento11 páginasInforme Mejora de Productos y Procesos Con La Incorporación de TIC. GA1-220501046-AA3-EV01Junior Obando Jacome0% (1)
- JS AjaxDocumento12 páginasJS AjaxDiego GarridoAún no hay calificaciones
- Curriculum Vitae Kely-AqpDocumento4 páginasCurriculum Vitae Kely-AqpJonathan Corimanya CasteloAún no hay calificaciones
- Zebra s4m Manual UsuarioDocumento162 páginasZebra s4m Manual UsuarioSIVOCK JENKINSAún no hay calificaciones
- 00 AdminDocumento22 páginas00 AdminEMANUEL ABSCH GUILLAUMINAún no hay calificaciones
- MicrosoftDocumento5 páginasMicrosoftJorge QuijadaAún no hay calificaciones
- Hidro SoftwarepresentDocumento17 páginasHidro SoftwarepresentLuis CulebroAún no hay calificaciones
- Sistemas Operativos 2021Documento21 páginasSistemas Operativos 2021juan estefano perez avilaAún no hay calificaciones
- Algoritmos Filtrado de SeñalesDocumento89 páginasAlgoritmos Filtrado de SeñalesOriginalCartofAún no hay calificaciones
- Base de Datos MultidimensionalesDocumento6 páginasBase de Datos MultidimensionalesmichelleAún no hay calificaciones
- Sistema de Archivos de La ComibolDocumento2 páginasSistema de Archivos de La ComibolLuis Fernando qisbertAún no hay calificaciones
- Project CharterDocumento6 páginasProject CharterDany de la CruzAún no hay calificaciones
- Descripcion Del Proyecto Arquitectura de SoftwareDocumento3 páginasDescripcion Del Proyecto Arquitectura de SoftwarekarlapatisAún no hay calificaciones
- Buenas Practicas Switch CiscoDocumento11 páginasBuenas Practicas Switch CiscoJean PxxAún no hay calificaciones
- Psa 2012-02-002 Es PDFDocumento7 páginasPsa 2012-02-002 Es PDFoctavinavarro8236Aún no hay calificaciones
- Ut FSMDocumento117 páginasUt FSMRodrigo Ortuzar MaturanaAún no hay calificaciones
- XP 211Documento6 páginasXP 211Cambios PereiraAún no hay calificaciones
- 00 Civil 3d Int Sesión 1 Manual Ma20210325Documento49 páginas00 Civil 3d Int Sesión 1 Manual Ma20210325Filiberto Vidal FloresAún no hay calificaciones
- Práctica 3. SocketsDocumento3 páginasPráctica 3. SocketsJuanAún no hay calificaciones
- Manua Excel Intermedio PDFDocumento55 páginasManua Excel Intermedio PDFSamuel Santana HAún no hay calificaciones