También podría gustarte
- Integración Por TablasDocumento3 páginasIntegración Por Tablasguait9Aún no hay calificaciones
- Integral Definida 1Documento51 páginasIntegral Definida 1joserami7073370100% (1)
- Arbol de Problemas y ObjetivosDocumento2 páginasArbol de Problemas y Objetivosフアン パブロAún no hay calificaciones
- Metodo VDMDocumento15 páginasMetodo VDMフアン パブロAún no hay calificaciones
- Especificación Formal SecuencialDocumento25 páginasEspecificación Formal SecuencialrgdgpAún no hay calificaciones
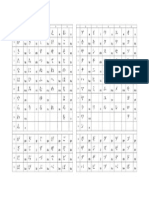
- Abecedario JaponesDocumento1 páginaAbecedario Japonesフアン パブロAún no hay calificaciones
- Demostración Del Método NuméricoDocumento2 páginasDemostración Del Método NuméricoSebas Jimenez MAún no hay calificaciones
- Taller de FuncionesDocumento2 páginasTaller de FuncionesRichard Andrew Grisales CastellanosAún no hay calificaciones
- EI Programa GuiaMatemáticasDocumento19 páginasEI Programa GuiaMatemáticasAxelAún no hay calificaciones
- Taller Corte 2 IntegralDocumento1 páginaTaller Corte 2 IntegralJuan Pablo Rengifo RuizAún no hay calificaciones
- G9 - Progresiones y Series Aritméticas - GeométricasDocumento17 páginasG9 - Progresiones y Series Aritméticas - GeométricasCristian Andrés Delgado CalderónAún no hay calificaciones
- FactorizaciónDocumento16 páginasFactorizaciónIsabel GonzálezAún no hay calificaciones
- Descomposición Factorial de Polinomios Con Coeficientes RealesDocumento10 páginasDescomposición Factorial de Polinomios Con Coeficientes Realesjavier_358655467Aún no hay calificaciones
- Subtema 1.1.1Documento4 páginasSubtema 1.1.1Cristian Uriel Dominguez AntonioAún no hay calificaciones
- Historia Del Cálculo Integral - Sotelo - Cuervo - Línea Del Tiempo - ACT#3Documento2 páginasHistoria Del Cálculo Integral - Sotelo - Cuervo - Línea Del Tiempo - ACT#3Victor Enrique Sotelo CuervoAún no hay calificaciones
- PerceptronDocumento12 páginasPerceptronKandel YandarAún no hay calificaciones
- S03.s1 - FUNCIÓN BETADocumento5 páginasS03.s1 - FUNCIÓN BETASh4Dow FoXAún no hay calificaciones
- Capitulo 1 PDFDocumento48 páginasCapitulo 1 PDFFrancisco Javier Herrera HernandezAún no hay calificaciones
- Rodríguez, F. Pierdant, A. (2014) - Estadística para Administración PDFDocumento4 páginasRodríguez, F. Pierdant, A. (2014) - Estadística para Administración PDFCristian DavidAún no hay calificaciones
- MATRICESDocumento9 páginasMATRICESPOETICO SOÑADORAún no hay calificaciones
- Guia Concerniente A FuncionesDocumento7 páginasGuia Concerniente A FuncionesIsaac DiazAún no hay calificaciones
- Clase 4. Funcion Compuesta y Funcion Inversa 2320Documento33 páginasClase 4. Funcion Compuesta y Funcion Inversa 2320Joao VargasAún no hay calificaciones
- Solución Examen FinalDocumento7 páginasSolución Examen Finalfredy catañoAún no hay calificaciones
- Teoria de Las ProyeccionesDocumento12 páginasTeoria de Las ProyeccionesgiannaAún no hay calificaciones
- Producto Hadamard de B-MatricesDocumento6 páginasProducto Hadamard de B-MatricesmanuelAún no hay calificaciones
- Polinomios SeleccionadasDocumento3 páginasPolinomios SeleccionadasluzAún no hay calificaciones
- LimitesDocumento30 páginasLimitesKurai SoraAún no hay calificaciones
- 1 Cuestionario-NUMEROS COMPLEJOSDocumento3 páginas1 Cuestionario-NUMEROS COMPLEJOSAnonymous bb9CV4Tpg0% (2)
- Ordenada Segunda Componente Del Par OrdenadoDocumento2 páginasOrdenada Segunda Componente Del Par OrdenadoMauriseth MirandaAún no hay calificaciones
- Trabajo Algebra LinealDocumento7 páginasTrabajo Algebra LinealAndrés ContrerasAún no hay calificaciones
- Redondeo y Truncamiento InformaticaDocumento6 páginasRedondeo y Truncamiento InformaticaJManuel BriceñoAún no hay calificaciones
- Clase 15. Integrales Triples en Coordenadas CurvilíneasDocumento7 páginasClase 15. Integrales Triples en Coordenadas CurvilíneasJhonatan Felipe Tovar RomeroAún no hay calificaciones
- Regla TrapecioDocumento13 páginasRegla TrapecioMelisaBarraCasasAún no hay calificaciones