También podría gustarte
- El Diodo de PotenciaDocumento26 páginasEl Diodo de PotenciaGenaro ortega aguirreAún no hay calificaciones
- 1.2 Dispositivos de DisparoDocumento16 páginas1.2 Dispositivos de DisparoRicardo Ballesteros MartínezAún no hay calificaciones
- Disparo de Triacs y TiristoresDocumento21 páginasDisparo de Triacs y TiristoresJuanito PanchoAún no hay calificaciones
- Modelo Presa DepresadorDocumento43 páginasModelo Presa DepresadorMary RodríguezAún no hay calificaciones
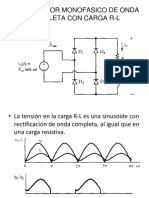
- Rectificador Monofasico de Onda Completa Con Carga R LDocumento14 páginasRectificador Monofasico de Onda Completa Con Carga R LANA BELEN MORENO CORDOVAAún no hay calificaciones
- Puntos Extra 4 AutocalificableDocumento5 páginasPuntos Extra 4 AutocalificableVicente Romero80% (5)
- Para Que Nuestro Pic Funcione FísicamenteDocumento7 páginasPara Que Nuestro Pic Funcione FísicamenteAna Suggey100% (1)
- ATmega 164p (ESP)Documento378 páginasATmega 164p (ESP)inalac2Aún no hay calificaciones
- Paso 5 Componente Practico - Edinson Medina - 309696 - 15Documento26 páginasPaso 5 Componente Practico - Edinson Medina - 309696 - 15Edinson Medina RiveraAún no hay calificaciones
- Clase Microcontroladores PDFDocumento164 páginasClase Microcontroladores PDFIsmael SilvaAún no hay calificaciones
- c17 ExampleDocumento629 páginasc17 ExampleChristian Manuel Bravo Gómez100% (1)
- Quemador de PicSDocumento8 páginasQuemador de PicSRicardo RoseroAún no hay calificaciones
- Reporte de Practica 5. Circuito de Disparo para TRIACDocumento6 páginasReporte de Practica 5. Circuito de Disparo para TRIACjoseyliAún no hay calificaciones
- Informe 1 Circuitos DigitalesDocumento18 páginasInforme 1 Circuitos DigitalesJose Carlos Fabian Mamani VilcapazaAún no hay calificaciones
- Comprensión de Los Pines Del IC SG3525 - Proyectos de Circuitos CaserosDocumento4 páginasComprensión de Los Pines Del IC SG3525 - Proyectos de Circuitos CaserosAnonymous e3XZzQAún no hay calificaciones
- RegistrosDocumento13 páginasRegistrosLeonardo BorregoAún no hay calificaciones
- Aplicaciones Del SCR 1 2 4xsc1rDocumento3 páginasAplicaciones Del SCR 1 2 4xsc1rDaniela ToaingaAún no hay calificaciones
- Lab. 7 - Circuito de Disparo Por Pulsos Con 555Documento3 páginasLab. 7 - Circuito de Disparo Por Pulsos Con 555Wendy JiménezAún no hay calificaciones
- Convertidores VF FVDocumento5 páginasConvertidores VF FVdavix2911Aún no hay calificaciones
- SCR - Aplicaciones - 1Documento9 páginasSCR - Aplicaciones - 1JAck SalazarAún no hay calificaciones
- 120-Pre para Capsula Magnetica y MicrofonoDocumento4 páginas120-Pre para Capsula Magnetica y MicrofonoEsteban Bovina100% (1)
- Diseño de Disparo de Un SCR Con R-CDocumento6 páginasDiseño de Disparo de Un SCR Con R-Cpaco_tunAún no hay calificaciones
- Sensor Shield V5 0 para ArduinoDocumento2 páginasSensor Shield V5 0 para ArduinoHector GeraldAún no hay calificaciones
- Ejercicios Básicos para MicroconladoresDocumento8 páginasEjercicios Básicos para MicroconladoresestanizniloAún no hay calificaciones
- Regulador de en Voltaje Circuito IntegradoDocumento4 páginasRegulador de en Voltaje Circuito IntegradoEduar Denis Espinoza CamposAún no hay calificaciones
- Fuente Regulada 3 AmpDocumento6 páginasFuente Regulada 3 AmpfranklimtecnicoAún no hay calificaciones
- Práctica #5 RC CargaDocumento3 páginasPráctica #5 RC CargaMartín BartolotteAún no hay calificaciones
- Control de Potencia para Microcontroladores y Compatible Con ArduinoDocumento1 páginaControl de Potencia para Microcontroladores y Compatible Con ArduinoUlises Santos LópezAún no hay calificaciones
- 9.osciladores de Relajación Ujt-PutDocumento17 páginas9.osciladores de Relajación Ujt-Putbajonero.ivanAún no hay calificaciones
- Informe de Nuestro Ampli AB (Final) ANALOGA 2Documento37 páginasInforme de Nuestro Ampli AB (Final) ANALOGA 2Alisandro AfataAún no hay calificaciones
- Indicador de Temperatura Con LM324 (C. Impreso)Documento2 páginasIndicador de Temperatura Con LM324 (C. Impreso)matubelAún no hay calificaciones
- Apagado Automático Luces de AutomóvilDocumento3 páginasApagado Automático Luces de Automóvildario riveraAún no hay calificaciones
- Cargador de Batería Con Desconexión AutomáticaDocumento2 páginasCargador de Batería Con Desconexión AutomáticaeduardoquijadaAún no hay calificaciones
- Voltimetro Digital Con Display de 7 SegmentosDocumento2 páginasVoltimetro Digital Con Display de 7 Segmentoscarlos turriza50% (2)
- Diagrama de Contactos y Diagrama de Fuerza Con CadesimuDocumento7 páginasDiagrama de Contactos y Diagrama de Fuerza Con CadesimuMauro M Janco BernabeAún no hay calificaciones
- Adc0804 Conversor Analogo DigitalDocumento3 páginasAdc0804 Conversor Analogo DigitalRonald Däviid WarAún no hay calificaciones
- Clase2 IIDocumento49 páginasClase2 IIVladimir Falcon LunaAún no hay calificaciones
- Prepa2 - LabEP (CARACTERIZACIÓN DE DIODOS DE POTENCIA)Documento3 páginasPrepa2 - LabEP (CARACTERIZACIÓN DE DIODOS DE POTENCIA)Mauricio LlanoAún no hay calificaciones
- El TRIAC 1Documento16 páginasEl TRIAC 1fabian antonyAún no hay calificaciones
- Ao FinalDocumento12 páginasAo Finalkmilo prietoAún no hay calificaciones
- Capitulo 8 WordDocumento104 páginasCapitulo 8 Word....Aún no hay calificaciones
- Control de Motores DC Con Micro Control Adores PICDocumento8 páginasControl de Motores DC Con Micro Control Adores PICPatariki Gastón Mansilla0% (1)
- Smps DiseñoDocumento9 páginasSmps DiseñoAlejandra Roque100% (1)
- CicloconvertidoresDocumento25 páginasCicloconvertidoresTulio Escobar ZamoraAún no hay calificaciones
- El 4017 LargoooDocumento6 páginasEl 4017 LargoooJohannyr7Aún no hay calificaciones
- MÓDULO CCP (CapturaDocumento27 páginasMÓDULO CCP (CapturaVeruska San Miguel0% (1)
- Colector Abierto en TTL y CmosDocumento8 páginasColector Abierto en TTL y CmosMauricio NavarreteAún no hay calificaciones
- Familias TTL y CmosDocumento14 páginasFamilias TTL y CmosDiana OlivaresAún no hay calificaciones
- Mosfet D Amplificador 2N7000Documento8 páginasMosfet D Amplificador 2N7000Julian Andres VictoriaAún no hay calificaciones
- Diseño Con Pic Cerradura ElectronicaDocumento10 páginasDiseño Con Pic Cerradura ElectronicaJuan David Barrera Granados100% (1)
- Laboratorio Diagrama de BodeDocumento4 páginasLaboratorio Diagrama de BodeJulian RoaAún no hay calificaciones
- ADC Pic16f877aDocumento3 páginasADC Pic16f877ajhon alexAún no hay calificaciones
- Polarización de DC para BJTDocumento12 páginasPolarización de DC para BJTFidel EspinalAún no hay calificaciones
- Experimento 29Documento3 páginasExperimento 29samuelAún no hay calificaciones
- BalunDocumento2 páginasBalunLuz Maria PenagosAún no hay calificaciones
- 8 - Modulo MSSP y Otros MicrocontroladoresDocumento52 páginas8 - Modulo MSSP y Otros MicrocontroladoresAndres Castro VacaAún no hay calificaciones
- Práctica 1 Dimmer DigitalDocumento9 páginasPráctica 1 Dimmer DigitalSergio RCAún no hay calificaciones
- Circuitos Buck, Boost y Buck-BoostDocumento5 páginasCircuitos Buck, Boost y Buck-BoostGeovanhy VernazaAún no hay calificaciones
- Acondicionamiento de Señal para Sensor InductivoDocumento5 páginasAcondicionamiento de Señal para Sensor InductivoJorge MarioAún no hay calificaciones
- Informe Fuente de CorrienteDocumento8 páginasInforme Fuente de CorrienteHaider Navarro100% (2)
- PIC16F877 ResumenDocumento22 páginasPIC16F877 ResumenCarlosperezmAún no hay calificaciones
- Electronica - Curso Avansado de Microcontroladores Pic (Proyectos Pic 16f84)Documento162 páginasElectronica - Curso Avansado de Microcontroladores Pic (Proyectos Pic 16f84)Jorge DominguezAún no hay calificaciones
- Capítulo 01-MicrocontroladoresDocumento7 páginasCapítulo 01-MicrocontroladoresNelson VargasAún no hay calificaciones
- Microcontroladores para Proyecto de Sistema de RiegoDocumento51 páginasMicrocontroladores para Proyecto de Sistema de RiegoMichael PetersAún no hay calificaciones
- Componente Practico - Camilo MejiaDocumento26 páginasComponente Practico - Camilo MejiaCamilo Andres Mejia galeanoAún no hay calificaciones
- Ieee FormatDocumento4 páginasIeee FormatMary RodríguezAún no hay calificaciones
- Cómo Resetear Cartuchos HPDocumento2 páginasCómo Resetear Cartuchos HPMary RodríguezAún no hay calificaciones
- Comportamiento Circuitos RLC PDFDocumento29 páginasComportamiento Circuitos RLC PDFMary RodríguezAún no hay calificaciones
- Gases RealesDocumento13 páginasGases RealesMary RodríguezAún no hay calificaciones
- Ok y Uyy UyyyDocumento44 páginasOk y Uyy UyyyaperfedericoAún no hay calificaciones
- ¿Qué Es Un TAD?: ListaDocumento4 páginas¿Qué Es Un TAD?: ListananamilucyAún no hay calificaciones
- CASIO Guia Operacion 3415 Español PDFDocumento14 páginasCASIO Guia Operacion 3415 Español PDFlynx437100% (1)
- Principales Instrucciones en Lenguaje EnsambladorDocumento8 páginasPrincipales Instrucciones en Lenguaje EnsambladorBONIFACIO GARCIA LUNAAún no hay calificaciones
- ANALISIS DE ALGORITMO RECURSIVO E ITERATIVO OficialDocumento13 páginasANALISIS DE ALGORITMO RECURSIVO E ITERATIVO OficialNestor Hernandez VidezAún no hay calificaciones
- Practica 5Documento3 páginasPractica 5Jorge BorreroAún no hay calificaciones
- IntroduccionEmu8086-Part 2Documento11 páginasIntroduccionEmu8086-Part 2Yuri imuraAún no hay calificaciones
- Notas Del PIC16F84Documento132 páginasNotas Del PIC16F84Thecar DarkAún no hay calificaciones
- Arquitectura de Ensamblador PEDocumento12 páginasArquitectura de Ensamblador PEEstanislao Arandia RojasAún no hay calificaciones
- AED II - Practico 2 - Pilas y ColasDocumento23 páginasAED II - Practico 2 - Pilas y Colassamuel gonzalezAún no hay calificaciones
- Seguridad en Aplicaciones EJE 3Documento12 páginasSeguridad en Aplicaciones EJE 3Oscar Eduardo Mayor JaramilloAún no hay calificaciones
- Semana 4 ESTRUCTURA DE DATOSDocumento9 páginasSemana 4 ESTRUCTURA DE DATOSpepe perezAún no hay calificaciones
- Introducción A AndroidDocumento121 páginasIntroducción A AndroidPerrin HaarpAún no hay calificaciones
- Ampliando El Espacio de La Zona de Inter Cam Bio en JavaDocumento9 páginasAmpliando El Espacio de La Zona de Inter Cam Bio en JavaronalcAún no hay calificaciones
- Una Defensa Crítica de Las Memorias de TraducciónDocumento3 páginasUna Defensa Crítica de Las Memorias de TraducciónGabriela AlvarezAún no hay calificaciones
- Apuntes de MicrocontroladoresDocumento66 páginasApuntes de MicrocontroladoresIgnacio CarvajalAún no hay calificaciones
- SYS Luis Vadiviezo PDFDocumento88 páginasSYS Luis Vadiviezo PDFmichelAún no hay calificaciones
- 3er EstructurasDeDatos Guia PracticaLaboratorio02Documento8 páginas3er EstructurasDeDatos Guia PracticaLaboratorio02Luis Eduardo ValladolidAún no hay calificaciones
- TALLER #2 Modulo 3 OAC PARA PARCIAL 3Documento6 páginasTALLER #2 Modulo 3 OAC PARA PARCIAL 3Delvis Joel CruzAún no hay calificaciones
- Cap 12Documento24 páginasCap 12Agustín RodriguezAún no hay calificaciones
- Manual Bzi Rf2gh4Documento23 páginasManual Bzi Rf2gh4Eduardo LXAún no hay calificaciones
- 2 Descripción General Del PIC16F877 PDFDocumento63 páginas2 Descripción General Del PIC16F877 PDFMikael MontenegroAún no hay calificaciones
- Practicas de Java LaborDocumento4 páginasPracticas de Java LaborWilson Andrade LanzaAún no hay calificaciones
- Investigacion Lenguajes y Automatas 1.4 Al 1.7Documento10 páginasInvestigacion Lenguajes y Automatas 1.4 Al 1.7La Pulga TorresAún no hay calificaciones
- Arquitectura Del Microprocesador z80Documento5 páginasArquitectura Del Microprocesador z80manue1969Aún no hay calificaciones