También podría gustarte
- Conceptos Básicos de SolidWorks Piezas y EnsamblajesDocumento483 páginasConceptos Básicos de SolidWorks Piezas y EnsamblajesVictor Maturana Castillo83% (6)
- Anteproyecto Tunel CalifornianoDocumento20 páginasAnteproyecto Tunel Californianovladimir valderrama a.67% (3)
- Documentacion Maquinaria Torno PDFDocumento31 páginasDocumentacion Maquinaria Torno PDFMiguel PastenAún no hay calificaciones
- Estudio de MercadoDocumento2 páginasEstudio de MercadoMario Antonio Soto VasquezAún no hay calificaciones
- Tornos y MantenimientoDocumento28 páginasTornos y MantenimientoCarlos García0% (1)
- Hidraulica BasicaDocumento161 páginasHidraulica Basicaangel_faria4054100% (2)
- Sistemas NeumaticosDocumento301 páginasSistemas NeumaticosEd R´c100% (15)
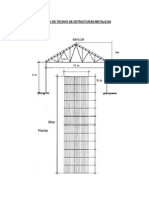
- Calculo de Techos de Estructuras MetalicasDocumento19 páginasCalculo de Techos de Estructuras MetalicasWalter E. Pinillos86% (7)
- Propiedades LogaritmosDocumento15 páginasPropiedades LogaritmosPilar Abella ÁlvarezAún no hay calificaciones
- El Taladro Radial Los Taladros Radiales Se Componen de Una Amplia Base Horizontal Sobre La Que Generalmente Se Halla Dispuesta La Mesa Porta Piezas FijaDocumento5 páginasEl Taladro Radial Los Taladros Radiales Se Componen de Una Amplia Base Horizontal Sobre La Que Generalmente Se Halla Dispuesta La Mesa Porta Piezas FijaAyala Eduardo100% (2)
- Ejemplo Automation Studio PDFDocumento13 páginasEjemplo Automation Studio PDFMiguelDelBarrioIglesisasAún no hay calificaciones
- 2 Manual de Operacion y MantenimientoDocumento24 páginas2 Manual de Operacion y MantenimientoMiguel PastenAún no hay calificaciones
- JRD Módulo Electrohidráulica Students - PDFDocumento161 páginasJRD Módulo Electrohidráulica Students - PDFDjPuk100% (1)
- Neumatica/hidraulica Ejercicios ResueltosDocumento18 páginasNeumatica/hidraulica Ejercicios ResueltosLuis Navarro100% (1)
- 2 Manual de Operacion y MantenimientoDocumento24 páginas2 Manual de Operacion y MantenimientoMiguel PastenAún no hay calificaciones
- 2 Manual de Operacion y MantenimientoDocumento24 páginas2 Manual de Operacion y MantenimientoMiguel PastenAún no hay calificaciones
- Mantenimiento FresadoraDocumento12 páginasMantenimiento FresadoraMiguel PastenAún no hay calificaciones
- QeS MM - av.TT - Guia Transacciones y Tablas V08Documento16 páginasQeS MM - av.TT - Guia Transacciones y Tablas V08chilvys04Aún no hay calificaciones
- Calores Específicos de DiversosDocumento12 páginasCalores Específicos de DiversosAnonymous o33Y7OWpTlAún no hay calificaciones
- Guia Elaboracion Diagramas Flujo 2009Documento21 páginasGuia Elaboracion Diagramas Flujo 2009sotocc0% (1)
- Cadena Del FrioDocumento50 páginasCadena Del FrioNicolas ParraAún no hay calificaciones
- 1-Componentes de PCDocumento27 páginas1-Componentes de PCLiga Roque Gonzaleña SeniorAún no hay calificaciones
- Documentación Maquinaria - TornoDocumento31 páginasDocumentación Maquinaria - Tornowilochalo80% (10)
- Homework BookDocumento66 páginasHomework BookLorena Oyarzo Hidalgo100% (3)
- Diseodecamarafrigorifica 120703132656 Phpapp01Documento149 páginasDiseodecamarafrigorifica 120703132656 Phpapp01Miguel PastenAún no hay calificaciones
- Técnicas de Mantenimiento IndustrialDocumento235 páginasTécnicas de Mantenimiento IndustrialFreeLatinBird100% (6)
- Refrigerantes Modulo 15Documento44 páginasRefrigerantes Modulo 15Miguel PastenAún no hay calificaciones
- Homework BookDocumento66 páginasHomework BookLorena Oyarzo Hidalgo100% (3)
- Homework BookDocumento66 páginasHomework BookLorena Oyarzo Hidalgo100% (3)
- MecanicaindustrialDocumento6 páginasMecanicaindustrialMiguel PastenAún no hay calificaciones
- 2017 II-Trabajo01 SistLogDocumento3 páginas2017 II-Trabajo01 SistLogPaúlEduardoCervantesParvinaAún no hay calificaciones
- Introduccion Al Lenguaje CDocumento25 páginasIntroduccion Al Lenguaje CagusAún no hay calificaciones
- Ejemplo de Metrados ArquitecturaDocumento21 páginasEjemplo de Metrados ArquitecturaYhoniArotomaLandeoAún no hay calificaciones
- Circuito Elemental UNAMDocumento5 páginasCircuito Elemental UNAMAlejandro González RuvalcabaAún no hay calificaciones
- Matriz de Vester Estudiantes TDO - Ejercicio PracticoDocumento9 páginasMatriz de Vester Estudiantes TDO - Ejercicio PracticoOscar CoralAún no hay calificaciones
- Comandos Shell para Windows y LinuxDocumento19 páginasComandos Shell para Windows y LinuxMICHAELAún no hay calificaciones
- Tarea 6Documento5 páginasTarea 6ElmemoAún no hay calificaciones
- Brochure Completo Cont - RaDocumento28 páginasBrochure Completo Cont - RaJohnny QuispeAún no hay calificaciones
- Cables de Guarda en Torres de Alta Tension y RayosDocumento4 páginasCables de Guarda en Torres de Alta Tension y RayosManuel Jesús Torres CaterianoAún no hay calificaciones
- Curso Motor c27 Acert Tractor Cadenas d10t CaterpillarDocumento31 páginasCurso Motor c27 Acert Tractor Cadenas d10t CaterpillarBoris PQ100% (5)
- Motor Isb6.7+Cpl3878+Camiones BrasilDocumento4 páginasMotor Isb6.7+Cpl3878+Camiones BrasilAlexis SanchezAún no hay calificaciones
- Turbina de VaporDocumento31 páginasTurbina de VaporGERADO100% (1)
- Intercambiador de Calor de Una Caldera AcuotubularDocumento17 páginasIntercambiador de Calor de Una Caldera AcuotubularAuvemar RodriguezAún no hay calificaciones
- Actividad 7 EconomiaDocumento4 páginasActividad 7 EconomiaPaula CaceresAún no hay calificaciones
- Aparato MisteriosoDocumento3 páginasAparato MisteriosoDionicio Abraham Ponce RomeroAún no hay calificaciones
- Base de Datos NoSQLDocumento13 páginasBase de Datos NoSQLmaxibooksAún no hay calificaciones
- Método de Hunsaker y RightmireDocumento3 páginasMétodo de Hunsaker y RightmireAlvaro Eduardo Barrantes ZelaAún no hay calificaciones
- Ejercicio para La Determinación Del Índice de Fallas Por Atributos. Eunice ReyesDocumento4 páginasEjercicio para La Determinación Del Índice de Fallas Por Atributos. Eunice ReyesCely Eunice Reyes CuellarAún no hay calificaciones
- ML2 CML 01B C 11B S253 Aamob Gen Et 2070 00Documento34 páginasML2 CML 01B C 11B S253 Aamob Gen Et 2070 00OSCAR ALEXANDER JIMENEZ ZUBIETAAún no hay calificaciones
- Informe II Teodolito RadiacionDocumento24 páginasInforme II Teodolito RadiacionJhussepy Marciano Mendoza RuizAún no hay calificaciones
- Trabajo Foro Semana 5 y 6 Programacion de Computadores ...Documento2 páginasTrabajo Foro Semana 5 y 6 Programacion de Computadores ...Martha Yaneth Osorio Gomez100% (6)
- Instalaciones Electricas en Media y Baja TensionDocumento48 páginasInstalaciones Electricas en Media y Baja TensionCristhian Fernando Sanchez Robles100% (2)
- Equipos de DestilacionDocumento4 páginasEquipos de DestilacionJulianAguilarFernandez100% (1)
- EvaporadoresDocumento17 páginasEvaporadoresCarlos Francisco Sanchez CapellanAún no hay calificaciones
- 2022 Resueltos ParcialDocumento24 páginas2022 Resueltos ParcialSonia GautoAún no hay calificaciones
- Ejercicios Dinamica 1Documento8 páginasEjercicios Dinamica 1CharaGutierrezRolandoCarlosAún no hay calificaciones
- Análisis de RiesgoDocumento51 páginasAnálisis de RiesgoEDISON PONCEAún no hay calificaciones
- Insert Lea Ps KW 10863993 AssemblysheetDocumento2 páginasInsert Lea Ps KW 10863993 AssemblysheetSergio Matador VegaAún no hay calificaciones
- Unidad Dental QL2028, Dental Unit, Fengdan, CATALOGO PDFDocumento7 páginasUnidad Dental QL2028, Dental Unit, Fengdan, CATALOGO PDFAnibal PeñaAún no hay calificaciones
- Informe de SedimentaciónDocumento15 páginasInforme de SedimentaciónCarolina Arias Gallego0% (1)