También podría gustarte
- The Laws of Buoyancy and Initial Stability: Şekil 5.1. Forces Acting On A Displacement VesselDocumento7 páginasThe Laws of Buoyancy and Initial Stability: Şekil 5.1. Forces Acting On A Displacement VesselRahul Phadake100% (1)
- B1b StabilityDocumento17 páginasB1b StabilityDarwin Neil MoranoAún no hay calificaciones
- Stability BookletDocumento27 páginasStability BookletArun Singh100% (3)
- Statical StabilityDocumento21 páginasStatical StabilityNeo Miala100% (2)
- Calculation of TrimDocumento5 páginasCalculation of TrimASGHAR100% (2)
- Unit IDocumento24 páginasUnit IsomasundaramAún no hay calificaciones
- Trim or Longitudinal StabilityDocumento5 páginasTrim or Longitudinal StabilityA JSprAún no hay calificaciones
- Centre of FloatationDocumento7 páginasCentre of FloatationBlack HawkAún no hay calificaciones
- Rolling Period: Rolling Period Is Time Interval From Extreme STBD Through Extreme Port and Back To Extreme STBDDocumento3 páginasRolling Period: Rolling Period Is Time Interval From Extreme STBD Through Extreme Port and Back To Extreme STBDGary LampenkoAún no hay calificaciones
- Ship Stability, Ship Trim Basic Principle OOWDocumento46 páginasShip Stability, Ship Trim Basic Principle OOWAmin Al QawasmehAún no hay calificaciones
- Stability and TrimDocumento27 páginasStability and TrimДмитрий ЯрычAún no hay calificaciones
- ET Inc Exp NotesDocumento7 páginasET Inc Exp NotesOrville monteiroAún no hay calificaciones
- 2 Plane Area of A Vessel Will Increase in Reality. The Small Angle Formula For GZ Should Only Be Used For Angles of Heel Up To About 5° or 6°Documento3 páginas2 Plane Area of A Vessel Will Increase in Reality. The Small Angle Formula For GZ Should Only Be Used For Angles of Heel Up To About 5° or 6°marvin santocildesAún no hay calificaciones
- Producing A Curve of Statical StabilityDocumento8 páginasProducing A Curve of Statical StabilityBharatiyulam100% (1)
- BilgingDocumento24 páginasBilgingsreedharsree45gmAún no hay calificaciones
- Module 1 - Dynamical StabilityDocumento22 páginasModule 1 - Dynamical StabilityAjay W Dhiman100% (1)
- A General Discussion On Ship StabilityDocumento6 páginasA General Discussion On Ship StabilityAnonymous UCveMQAún no hay calificaciones
- Class 2/1 Stability - Section 12 - Introduction To TrimDocumento19 páginasClass 2/1 Stability - Section 12 - Introduction To Trimfaisal100% (1)
- Deterministic Damage Stability PDFDocumento44 páginasDeterministic Damage Stability PDFUngke KansilAún no hay calificaciones
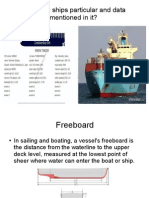
- FreeboardDocumento12 páginasFreeboardRodneyAún no hay calificaciones
- Load Line: Ship DesignDocumento89 páginasLoad Line: Ship DesignMuhammed Talha ÖzdenoğluAún no hay calificaciones
- Plane Sailing: Rhumb Line Sailing. in A Short Distance, A Rhumb Line Appears As Straight LineDocumento4 páginasPlane Sailing: Rhumb Line Sailing. in A Short Distance, A Rhumb Line Appears As Straight LineKevin Permana Immanuel Simanjuntak100% (1)
- 4.GSK and Ship Stability PDFDocumento28 páginas4.GSK and Ship Stability PDFTaufiq JahanAún no hay calificaciones
- Trim by LCB LCGDocumento9 páginasTrim by LCB LCGRutvikAún no hay calificaciones
- RINA - Trim & Stability BookletDocumento5 páginasRINA - Trim & Stability Bookletkevin kurnia marpaungAún no hay calificaciones
- List and Angle of Loll Problems With SolutionsDocumento7 páginasList and Angle of Loll Problems With SolutionsBerbaño, Jan JoshuaAún no hay calificaciones
- NA Problems 1Documento3 páginasNA Problems 1siddarth amaravathi100% (1)
- 01-NAC-Introduction To Ship Stability (160419)Documento40 páginas01-NAC-Introduction To Ship Stability (160419)MuhammadIlhamNugroho100% (1)
- Stability CriteriaDocumento7 páginasStability CriteriaSuperducksAún no hay calificaciones
- Cargo PBLMDocumento7 páginasCargo PBLMmeghna c binu100% (1)
- Initial StabilityDocumento10 páginasInitial Stabilityjonas lintagAún no hay calificaciones
- CLASS 2/1 STABILITY - SECTION 21 - Dry-DockingDocumento11 páginasCLASS 2/1 STABILITY - SECTION 21 - Dry-DockingfaisalAún no hay calificaciones
- Fresh Water AllowanceDocumento2 páginasFresh Water AllowanceFelino SibonghanoyAún no hay calificaciones
- Lightweight Survey and Inclining ExperimentDocumento24 páginasLightweight Survey and Inclining ExperimentFrankieAún no hay calificaciones
- 08-NAC-Curves of Stability and Stability Criteria (160213)Documento17 páginas08-NAC-Curves of Stability and Stability Criteria (160213)G SagunaAún no hay calificaciones
- 1011 - Hydrostatic Curves - GZ & KN Cross Curves - IntroductionDocumento33 páginas1011 - Hydrostatic Curves - GZ & KN Cross Curves - Introductionfarrell100% (1)
- Forces and Stresses On Ships (Compatibility Mode)Documento44 páginasForces and Stresses On Ships (Compatibility Mode)Htin Lin Aung100% (1)
- Module 2 - Free Surface EffectsDocumento27 páginasModule 2 - Free Surface EffectsAjay W DhimanAún no hay calificaciones
- Angle of LolDocumento11 páginasAngle of LolNitinVanjariAún no hay calificaciones
- Grain Loading Form AMSA225Documento6 páginasGrain Loading Form AMSA225tejmayer100% (1)
- Formula StabilityDocumento25 páginasFormula StabilityClarence ClarAún no hay calificaciones
- Assign No 3 GZ CurveDocumento3 páginasAssign No 3 GZ CurveShikhar SwaroopAún no hay calificaciones
- SQA Stability - Latest FormulasDocumento3 páginasSQA Stability - Latest FormulasShanilAún no hay calificaciones
- Inclining ExperimentDocumento7 páginasInclining ExperimentBharatiyulam100% (2)
- PDFDocumento5 páginasPDFSameera JayaratneAún no hay calificaciones
- Effect of A Negative GM On A Moving ShipDocumento14 páginasEffect of A Negative GM On A Moving ShipBrendan Rezz R CilotAún no hay calificaciones
- Shear Force and Bending Moment in ShipsDocumento42 páginasShear Force and Bending Moment in ShipsRijul Joshi83% (6)
- Final Intact Stability BookletDocumento91 páginasFinal Intact Stability BookletAngga Ardiansyah100% (4)
- Effect of Shift of Cargo On StabilityDocumento4 páginasEffect of Shift of Cargo On StabilityMahdi Bordbar100% (1)
- Boat Design - Stability FundementalsDocumento12 páginasBoat Design - Stability Fundementalskjourf388Aún no hay calificaciones
- Introduction To TSSDocumento11 páginasIntroduction To TSSnoczviviAún no hay calificaciones
- Fse On Ship StabilityDocumento34 páginasFse On Ship StabilityVinodh KumarAún no hay calificaciones
- 4 Statical Stability PDFDocumento24 páginas4 Statical Stability PDFchriscarldelimaAún no hay calificaciones
- Transverse Stability of ShipDocumento12 páginasTransverse Stability of ShipIrakli ShavishviliAún no hay calificaciones
- Ship StabilityDocumento12 páginasShip StabilityribbyAún no hay calificaciones
- Ship S Stability PDFDocumento17 páginasShip S Stability PDFKalaivani PeriyasamyAún no hay calificaciones
- Why Initial Met Height at 1 RadianDocumento9 páginasWhy Initial Met Height at 1 RadianRanjeet SinghAún no hay calificaciones
- HNC Nautical Science: Unit Code: F0LD 34 Ship Stability Outcome 3 - Statical StabilityDocumento40 páginasHNC Nautical Science: Unit Code: F0LD 34 Ship Stability Outcome 3 - Statical StabilityRan OronceAún no hay calificaciones
- Week 5 OOW Transvers Statice StabilityDocumento18 páginasWeek 5 OOW Transvers Statice StabilityAmin Al QawasmehAún no hay calificaciones
- Stability NotesDocumento17 páginasStability Notesnithin manimaranAún no hay calificaciones
- Types of Pumps-1Documento8 páginasTypes of Pumps-1Abdallah MansourAún no hay calificaciones
- Pumps TypesDocumento14 páginasPumps TypesAbdallah Mansour100% (1)
- Valves PicsDocumento12 páginasValves PicsAbdallah MansourAún no hay calificaciones
- Valve Types: - Gate Valves, Ball Valves, & Choke ValvesDocumento8 páginasValve Types: - Gate Valves, Ball Valves, & Choke ValvesAbdallah MansourAún no hay calificaciones
- Making Decisions With InsulationDocumento12 páginasMaking Decisions With InsulationAbdallah MansourAún no hay calificaciones
- Perforating Technology: China National Logging CorpDocumento39 páginasPerforating Technology: China National Logging Corpdarryl_gilbertAún no hay calificaciones
- Petroleum (1) .PPT (Recovered)Documento33 páginasPetroleum (1) .PPT (Recovered)Abdallah MansourAún no hay calificaciones
- 3 Idc99courseDocumento50 páginas3 Idc99coursebintangsatuAún no hay calificaciones
- Gas Sweetening FacilityDocumento28 páginasGas Sweetening FacilityAbdallah MansourAún no hay calificaciones
- Perforating Technology: China National Logging CorpDocumento39 páginasPerforating Technology: China National Logging Corpdarryl_gilbertAún no hay calificaciones
- Casting ProcessesDocumento56 páginasCasting ProcessesAbdallah MansourAún no hay calificaciones
- Vibration Quick ReferenceDocumento49 páginasVibration Quick Referencekeepmoshing2Aún no hay calificaciones
- Power CalculationDocumento5 páginasPower CalculationAbdallah MansourAún no hay calificaciones
- AFA II III OilDocumento74 páginasAFA II III OilAbdallah Mansour100% (1)
- Cast IronsDocumento34 páginasCast IronsAbdallah MansourAún no hay calificaciones
- Essential Variables of SmawDocumento7 páginasEssential Variables of SmawAbdallah Mansour100% (6)
- MEL 417 Lubrication Lec 170311Documento17 páginasMEL 417 Lubrication Lec 170311Akash NairAún no hay calificaciones
- Linear Algebra Chapter 5Documento53 páginasLinear Algebra Chapter 5bhameed-1958Aún no hay calificaciones
- Mixing-A Detailed Look at The Factors That Influence Mix UniformityDocumento19 páginasMixing-A Detailed Look at The Factors That Influence Mix UniformityreyesdavidAún no hay calificaciones
- Letter of Motivation - DaadDocumento2 páginasLetter of Motivation - DaadTamás TornyiAún no hay calificaciones
- Math - Final Time LessonDocumento12 páginasMath - Final Time Lessonapi-272910790Aún no hay calificaciones
- Classified Coordinate Geometry Further Maths ExercisesDocumento24 páginasClassified Coordinate Geometry Further Maths ExercisesAbrar RahmanAún no hay calificaciones
- 14.beam Analysis Using The Stiffness MethodDocumento23 páginas14.beam Analysis Using The Stiffness MethodSabbir HossainAún no hay calificaciones
- Syllabus For AutoCAD-3D Modeling.Documento3 páginasSyllabus For AutoCAD-3D Modeling.yesuppu56Aún no hay calificaciones
- Ven DiagramDocumento5 páginasVen DiagramNadine MillaminaAún no hay calificaciones
- Chapter 5Documento102 páginasChapter 5antutuAún no hay calificaciones
- Merton Truck CompanyDocumento16 páginasMerton Truck CompanyAmeeno Pradeep PaulAún no hay calificaciones
- Math 20-1 Max & Min Problem WorksheetDocumento4 páginasMath 20-1 Max & Min Problem WorksheetMSc Matejic S. MilosAún no hay calificaciones
- FEM Modeling Project: Evaluation of A Steel Pulley-and-Shaft DesignDocumento4 páginasFEM Modeling Project: Evaluation of A Steel Pulley-and-Shaft DesignMuhammad Hussain BilalAún no hay calificaciones
- Transitivity of PreferenceDocumento5 páginasTransitivity of PreferenceAli Asgor RatonAún no hay calificaciones
- TP36 Geopier Vs SC Performance Dr. David WhiteDocumento8 páginasTP36 Geopier Vs SC Performance Dr. David WhiteToby BobyAún no hay calificaciones
- Business Math - GuideDocumento10 páginasBusiness Math - GuideAva Barrameda67% (6)
- Algebra Set - 4Documento2 páginasAlgebra Set - 4Harsh singhalAún no hay calificaciones
- 4' - FDM - ExamplesDocumento24 páginas4' - FDM - ExamplesHasnain MurtazaAún no hay calificaciones
- Worlds-GDP-predection Using Machine LearningDocumento9 páginasWorlds-GDP-predection Using Machine LearningChung NguyenAún no hay calificaciones
- Control and Optimization of A Multiple Effect EvaporatorDocumento6 páginasControl and Optimization of A Multiple Effect EvaporatorthanhndbAún no hay calificaciones
- Audit Sampling (ACP323)Documento16 páginasAudit Sampling (ACP323)Aeyjay ManangaranAún no hay calificaciones
- Conservation of Mass Control Volumes: By: Bashir MomoduDocumento12 páginasConservation of Mass Control Volumes: By: Bashir MomoduBent ZayedAún no hay calificaciones
- Homework and Practice Workbook Holt Middle School Math Course 2 AnswersDocumento4 páginasHomework and Practice Workbook Holt Middle School Math Course 2 Answersd0t1f1wujap3100% (1)
- 1.4a - Prime FactorizationDocumento49 páginas1.4a - Prime FactorizationMegan EarlyAún no hay calificaciones
- Finite Element Programming With MATLABDocumento58 páginasFinite Element Programming With MATLABbharathjoda100% (8)
- Sample Paper ASAT VIIDocumento15 páginasSample Paper ASAT VIIThirumaleshwara M ShastryAún no hay calificaciones
- Designing A Distribution Network in A Supply Chain System: Formulation and e Cient Solution ProcedureDocumento10 páginasDesigning A Distribution Network in A Supply Chain System: Formulation and e Cient Solution ProcedureMuskaan NohriaAún no hay calificaciones
- Life Contingencies II: ObjectivesDocumento2 páginasLife Contingencies II: Objectivesdavid AbotsitseAún no hay calificaciones
- Pig Trap Cal.Documento16 páginasPig Trap Cal.chinazo onuigboAún no hay calificaciones
- Tutoring QuestionsDocumento7 páginasTutoring QuestionsJulieneAún no hay calificaciones
- Punctuation Marks in English GrammarDocumento3 páginasPunctuation Marks in English GrammarLesly Lisbeth Silva AcuñaAún no hay calificaciones