También podría gustarte
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 1 de 5 estrellas1/5 (2)
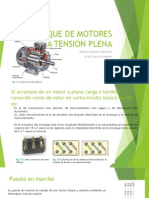
- Arranque de motores a tensión plena y reducida: métodos y diferenciasDocumento15 páginasArranque de motores a tensión plena y reducida: métodos y diferenciasRoberto Asencion AlcantarAún no hay calificaciones
- EBook - Construye Un CV A Prueba de Balas PDFDocumento32 páginasEBook - Construye Un CV A Prueba de Balas PDFHECMAN_DJAún no hay calificaciones
- Arranque de Un Motor Trifásico Por Arrancador SuaveDocumento45 páginasArranque de Un Motor Trifásico Por Arrancador SuaveEdwin Olivario Taipe Suri0% (1)
- Arrancadores y variadores de velocidad electrónicosDocumento21 páginasArrancadores y variadores de velocidad electrónicosYonatan Pallin YalleAún no hay calificaciones
- Control y protección de motores trifásicosDocumento37 páginasControl y protección de motores trifásicosnarutoAún no hay calificaciones
- Unidad 2 - Instalaciones de Arrancadores de Estado Solido y Variadores de VelocidadDocumento108 páginasUnidad 2 - Instalaciones de Arrancadores de Estado Solido y Variadores de VelocidadMartin100% (3)
- Mantenimiento A Motores Electricos DDDocumento41 páginasMantenimiento A Motores Electricos DDGael GutierrezAún no hay calificaciones
- Informe Partidor SuaveDocumento7 páginasInforme Partidor SuaveTomás SaldiviaAún no hay calificaciones
- Eeid Eeid-324 Material 001 PDFDocumento38 páginasEeid Eeid-324 Material 001 PDFDenis CotrinaAún no hay calificaciones
- ARRANCADORESDocumento12 páginasARRANCADORESStalyn Vela100% (1)
- Practica #1 - Arranque Directo de Un Motor Trifasico Jaula de ArdillaDocumento14 páginasPractica #1 - Arranque Directo de Un Motor Trifasico Jaula de ArdillaJesus Joel Gaspar Vasquez100% (1)
- Arrancador en Estado Solido PDFDocumento18 páginasArrancador en Estado Solido PDFSalvador Deyvi Rojas67% (3)
- Programacion Visual Con Java Parte 1Documento73 páginasProgramacion Visual Con Java Parte 1Sergio Hernandez Ensuncho25% (4)
- Arrancadores para Motores Trifásicos de Corriente AlternaDocumento15 páginasArrancadores para Motores Trifásicos de Corriente AlternaRoberto Sánchez0% (1)
- Partida Ampermetrica y Frenado DinamicoDocumento11 páginasPartida Ampermetrica y Frenado DinamicoJordan Cabrera67% (3)
- El Sistema Ward-LeonardDocumento10 páginasEl Sistema Ward-LeonardMilton Jô100% (2)
- Métodos de arranque de motores de inducciónDocumento7 páginasMétodos de arranque de motores de inducciónOscar Ivan Lopez CruzAún no hay calificaciones
- El Método Más Utilizado para Arrancar y Parar Un Motor EléctricoDocumento29 páginasEl Método Más Utilizado para Arrancar y Parar Un Motor EléctricoDaniel FloresAún no hay calificaciones
- Actividad 3-Tipos de Arranques-Molina, Ochoa, Simanca, SorianoDocumento19 páginasActividad 3-Tipos de Arranques-Molina, Ochoa, Simanca, SorianomiguelAún no hay calificaciones
- Arranque motores eléctricosDocumento16 páginasArranque motores eléctricoscesarAún no hay calificaciones
- Arranque Motor de Induccion A Tension Plena O Tension ReducidaDocumento11 páginasArranque Motor de Induccion A Tension Plena O Tension ReducidaFernando Hernandez HernandezAún no hay calificaciones
- Informe Partidor SuaveDocumento11 páginasInforme Partidor SuaveMagdiel AriasAún no hay calificaciones
- Universidad Tecnica Latinoamericana: Ing. Roy Donaldo SilvaDocumento17 páginasUniversidad Tecnica Latinoamericana: Ing. Roy Donaldo SilvaJose Alfredo Gonzalez CAún no hay calificaciones
- Arranque de Motores Jaula de ArdillaDocumento10 páginasArranque de Motores Jaula de ArdillaMarcelo TolaAún no hay calificaciones
- Metodo de ArranquueDocumento18 páginasMetodo de ArranquueWendy LoaizaAún no hay calificaciones
- Tp2 Fuerza MotrizDocumento8 páginasTp2 Fuerza MotrizEmilio SalomonAún no hay calificaciones
- Arrancadores Electricos - 085733Documento7 páginasArrancadores Electricos - 085733JOSE RENE VASQUES MENESESAún no hay calificaciones
- Arranque PR Condensador InformeDocumento7 páginasArranque PR Condensador InformeDany IngaAún no hay calificaciones
- Arranque Demo To ResDocumento3 páginasArranque Demo To Ressatopec100% (1)
- Consulta ME 3P BENALCAZAR FABRICIODocumento6 páginasConsulta ME 3P BENALCAZAR FABRICIOFabri BenalcazarAún no hay calificaciones
- Métodos de arranque de motores asíncronos trifásicosDocumento15 páginasMétodos de arranque de motores asíncronos trifásicosgilmer flores mamaniAún no hay calificaciones
- Marco TeoricoDocumento5 páginasMarco TeoricoGiovanni QCAún no hay calificaciones
- Resumen de Control de MotoresDocumento5 páginasResumen de Control de MotoresRebeca Sarisol Perez MontaneAún no hay calificaciones
- 233 EltDocumento12 páginas233 Eltsaulito.colque123Aún no hay calificaciones
- Motor Monofasico FinalDocumento10 páginasMotor Monofasico FinalJose ValenciaAún no hay calificaciones
- Motores de Inducción o AsincronosDocumento22 páginasMotores de Inducción o AsincronosCARLOS ALFREDO FRANCIS CABRERAAún no hay calificaciones
- M3 UF1 Tema 8 Arranque Control Protecc MotDocumento40 páginasM3 UF1 Tema 8 Arranque Control Protecc MotFrancesc Juanes CamposAún no hay calificaciones
- Actividad 4-Motores Eléctricos-Molina, Ochoa, Simanca, SorianoDocumento37 páginasActividad 4-Motores Eléctricos-Molina, Ochoa, Simanca, SorianomiguelAún no hay calificaciones
- Tec 193 7Documento5 páginasTec 193 7JOSEADANAún no hay calificaciones
- Control de Motores EléctricosDocumento18 páginasControl de Motores EléctricosJose Ignacio RCAún no hay calificaciones
- Informe Variador de Velocidad N 9Documento12 páginasInforme Variador de Velocidad N 9Katherine María Zambrano CasasAún no hay calificaciones
- Control y Proteccion A Motores de InduccionDocumento12 páginasControl y Proteccion A Motores de InduccionErick OsunaAún no hay calificaciones
- Laboratorio 2 IndustrialDocumento5 páginasLaboratorio 2 IndustrialJorge LozanoAún no hay calificaciones
- Arrancadores SuavesDocumento6 páginasArrancadores SuavesKarencitaCarriónClaudioAún no hay calificaciones
- Informe N°3 - Tarazona - Sacramento - Javier - Prueba de Arranque Por AutotransformadorDocumento8 páginasInforme N°3 - Tarazona - Sacramento - Javier - Prueba de Arranque Por Autotransformadorjhavier tarazonaAún no hay calificaciones
- Arrancador en Estado SolidoDocumento18 páginasArrancador en Estado SolidoSalvador Deyvi RojasAún no hay calificaciones
- Control InformesDocumento9 páginasControl InformesBrigit Tapia VillarroelAún no hay calificaciones
- Variador de Velocidad ImprimirDocumento6 páginasVariador de Velocidad ImprimirdiegoAún no hay calificaciones
- Tipos de Arranque de MotorDocumento16 páginasTipos de Arranque de MotoraldairAún no hay calificaciones
- Control de Arranque de MotoresDocumento17 páginasControl de Arranque de Motoresalejandro chirinosAún no hay calificaciones
- Arrancadores suaves vs variadores de frecuenciaDocumento68 páginasArrancadores suaves vs variadores de frecuenciaAlex EstradaAún no hay calificaciones
- Mantenimiento A Motores Electricos DDDocumento41 páginasMantenimiento A Motores Electricos DDGael GutierrezAún no hay calificaciones
- Arranque a tensión reducida mediante autotransformador UNMSMDocumento19 páginasArranque a tensión reducida mediante autotransformador UNMSMnilda lucia salcedo lopezAún no hay calificaciones
- Arrancadores electrónicos de potenciaDocumento8 páginasArrancadores electrónicos de potenciaGustavo Ricaño HernándezAún no hay calificaciones
- Máquinas Eléctricas IIDocumento27 páginasMáquinas Eléctricas IICamilo QuintoAún no hay calificaciones
- Tipos de Arranque Motores TrifasicosDocumento5 páginasTipos de Arranque Motores TrifasicosKATHERINEAún no hay calificaciones
- Maquinas ElectricasDocumento16 páginasMaquinas ElectricasCamilo OlivaresAún no hay calificaciones
- PRACTICA 1 - Control de Arranque Motor de Inducción en Modo directo-EQ3Documento18 páginasPRACTICA 1 - Control de Arranque Motor de Inducción en Modo directo-EQ3Jesús Edgar López DíazAún no hay calificaciones
- Mantenimiento A Motores ElectricosDocumento41 páginasMantenimiento A Motores ElectricosIvan Jacob80% (5)
- Practico #3Documento16 páginasPractico #3Davichín Morató FernandezAún no hay calificaciones
- Arrancadores SuavesDocumento25 páginasArrancadores SuavesAugustoDelgado100% (1)
- GutierrezDocumento7 páginasGutierrezFrank Luis Cornejo LópezAún no hay calificaciones
- Accesorios de La ValvulaDocumento6 páginasAccesorios de La ValvulaFrank Luis Cornejo LópezAún no hay calificaciones
- Grupo 2Documento26 páginasGrupo 2Frank Luis Cornejo LópezAún no hay calificaciones
- Introduccion CP CorregidoDocumento4 páginasIntroduccion CP CorregidoFrank Luis Cornejo LópezAún no hay calificaciones
- Clase 7 Asignatura Estructuras 10 11 2020Documento2 páginasClase 7 Asignatura Estructuras 10 11 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Clase 5 Asignatura Estructura 03 11 2020Documento3 páginasClase 5 Asignatura Estructura 03 11 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Intervalos de ConfianzaDocumento18 páginasIntervalos de ConfianzadracarvayoAún no hay calificaciones
- Clase 4 Asignatura Estructura 02 11 2020Documento3 páginasClase 4 Asignatura Estructura 02 11 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Clase 1 Curso Estructuras 20 10 2020Documento2 páginasClase 1 Curso Estructuras 20 10 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Clase 6 Asignatura Estructuras 09 11 2020Documento8 páginasClase 6 Asignatura Estructuras 09 11 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Clase 6 Asignatura Estructuras 09 11 2020Documento8 páginasClase 6 Asignatura Estructuras 09 11 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Clase 7 Asignatura Estructuras 10 11 2020Documento2 páginasClase 7 Asignatura Estructuras 10 11 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Clase 5 Asignatura Estructura 03 11 2020Documento3 páginasClase 5 Asignatura Estructura 03 11 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Clase 1 Curso Estructuras 20 10 2020Documento2 páginasClase 1 Curso Estructuras 20 10 2020Frank Luis Cornejo LópezAún no hay calificaciones
- Clase 4 Asignatura Estructura 02 11 2020Documento3 páginasClase 4 Asignatura Estructura 02 11 2020Frank Luis Cornejo LópezAún no hay calificaciones
- 2 Concepto de Estados LimitesDocumento4 páginas2 Concepto de Estados LimitesFrank Luis Cornejo LópezAún no hay calificaciones
- Ciclo CombinadoDocumento10 páginasCiclo CombinadoFrank Luis Cornejo LópezAún no hay calificaciones
- Actividad física para diabéticos AzoguesDocumento101 páginasActividad física para diabéticos AzoguesEdiciones CimarrónAún no hay calificaciones
- Fisio HematosisDocumento11 páginasFisio HematosisSantiago Rguez OrozcoAún no hay calificaciones
- El Reloj de ArenaDocumento3 páginasEl Reloj de ArenaJosbyn CortezAún no hay calificaciones
- Normas de las conjunciones copulativas e, y y uDocumento3 páginasNormas de las conjunciones copulativas e, y y uS Cristian ItoAún no hay calificaciones
- Cantoral: Legión de Cristo ReyDocumento231 páginasCantoral: Legión de Cristo ReyChiara SosaAún no hay calificaciones
- Conceptos básicos de funciones, permutaciones y conmutacionesDocumento6 páginasConceptos básicos de funciones, permutaciones y conmutacionesNataly Arango JaramilloAún no hay calificaciones
- Crisis en Los Años 2000 - 2010Documento21 páginasCrisis en Los Años 2000 - 2010NORELI YUCRA YUCRAAún no hay calificaciones
- Estructura organizativa y perfil ejecutivoDocumento23 páginasEstructura organizativa y perfil ejecutivoFernando Alvarez TtitoAún no hay calificaciones
- San Miguel Arcangel 23Documento4 páginasSan Miguel Arcangel 23edu71100% (2)
- Boletín Oficial: de La Provincia de LeónDocumento14 páginasBoletín Oficial: de La Provincia de LeónJesúsLópezAún no hay calificaciones
- Trabajo Práctico 2 de Planeamiento EducativoDocumento10 páginasTrabajo Práctico 2 de Planeamiento EducativoVladimirExequielFloresAún no hay calificaciones
- Civil - Notificacion de Sentencia de Divorcio Pedro La VegaDocumento3 páginasCivil - Notificacion de Sentencia de Divorcio Pedro La VegaBryant SantiagoAún no hay calificaciones
- Aacrea - Agroalimentos Argentinos 1Documento220 páginasAacrea - Agroalimentos Argentinos 1David Bustamante100% (1)
- Áreas para El Diseño de Los Sistemas AdministrativosDocumento2 páginasÁreas para El Diseño de Los Sistemas AdministrativosDaiana RojasAún no hay calificaciones
- Catalogo Nice MX 222Documento148 páginasCatalogo Nice MX 222Alejanddra Solis cruzAún no hay calificaciones
- Guía 2 Lenguaje - Primer CicloDocumento2 páginasGuía 2 Lenguaje - Primer CicloPazitha BahamondeAún no hay calificaciones
- Examen Extraordinario de Vida Saludable.20213sec.Documento12 páginasExamen Extraordinario de Vida Saludable.20213sec.José del Carmen Sonda Pozo0% (1)
- Ficha 3Documento2 páginasFicha 3EMILY PEREZ DURANAún no hay calificaciones
- Poliquistosis renal: definiciones, epidemiología y fisiopatologíaDocumento25 páginasPoliquistosis renal: definiciones, epidemiología y fisiopatologíaMARIO ALEJANDRO BEJARANO ROSELIOAún no hay calificaciones
- CV Fátima DomínguezDocumento5 páginasCV Fátima DomínguezKike AtaramaAún no hay calificaciones
- CASO Harley Davidson Versión 2Documento4 páginasCASO Harley Davidson Versión 2fcamus1983Aún no hay calificaciones
- Esquema Del Procedimiento Específico Del Juicio Por FaltaDocumento1 páginaEsquema Del Procedimiento Específico Del Juicio Por FaltaBrisna CanoAún no hay calificaciones
- Preguntas Diabtes MellitusDocumento7 páginasPreguntas Diabtes MellitusLuis BeltranAún no hay calificaciones
- Reglamento Operativo AvnDocumento43 páginasReglamento Operativo AvnClaudia Quiñones SarmientoAún no hay calificaciones
- Biocomercio Modelo Negocio Sostenible 2018 Keyword PrincipalDocumento112 páginasBiocomercio Modelo Negocio Sostenible 2018 Keyword PrincipalSheyla Quispe SerrranoAún no hay calificaciones
- Miedo EscenicoDocumento55 páginasMiedo EscenicoWilmerzinho Joseph Kicdo FlorsAún no hay calificaciones
- El Pueblo Miercoles 25.08.2021Documento14 páginasEl Pueblo Miercoles 25.08.2021Edmundo De la VegaAún no hay calificaciones
- Instalaciones Espacios de Juego Espacios de VidaDocumento4 páginasInstalaciones Espacios de Juego Espacios de VidaPaula LCAún no hay calificaciones