También podría gustarte
- PRACTICAS LIBRO DE LETRAS COMPLETO OK-with-numbers PDFDocumento230 páginasPRACTICAS LIBRO DE LETRAS COMPLETO OK-with-numbers PDFTaryAún no hay calificaciones
- Boga Mar AdentroDocumento7 páginasBoga Mar AdentroYuri BanegasAún no hay calificaciones
- Formulas - Ejercicios Resueltos de Fotogrametría y Propuestos - ABRIL 2018-1Documento6 páginasFormulas - Ejercicios Resueltos de Fotogrametría y Propuestos - ABRIL 2018-1Brenda Silvestre100% (2)
- 5 Defor GeomDocumento40 páginas5 Defor GeomWilder VelasquezAún no hay calificaciones
- Informe Balance de Energia MecanicaDocumento17 páginasInforme Balance de Energia MecanicaJose Emmanuel Chema100% (1)
- FOTOGRAMETRIA IntroduccionDocumento64 páginasFOTOGRAMETRIA IntroduccionNoemi Milagros Yucra Vargas100% (1)
- Método de La AutoobservaciónDocumento4 páginasMétodo de La AutoobservaciónRodrigo Vargas PérezAún no hay calificaciones
- 5 Defor GeomDocumento40 páginas5 Defor GeomFranklin RiverAún no hay calificaciones
- 10 Paralaje PDFDocumento9 páginas10 Paralaje PDFjose david rodriguez andiaAún no hay calificaciones
- Introducción A La FotogrametríaDocumento30 páginasIntroducción A La FotogrametríaMarcela AmayaAún no hay calificaciones
- DESPLAZAMIENTOS FOTOGRÁFICOS RELIEVE INCLINACIÓN DISTORSIÓNDocumento3 páginasDESPLAZAMIENTOS FOTOGRÁFICOS RELIEVE INCLINACIÓN DISTORSIÓNOrlando Piedrahita GonzalezAún no hay calificaciones
- Escala de La FotografíaDocumento9 páginasEscala de La FotografíaVaan Ronaldo PaytanAún no hay calificaciones
- Cartografia y FotogrametríaDocumento51 páginasCartografia y FotogrametríaNilsonAún no hay calificaciones
- Estereoscopía: métodos y conceptos básicosDocumento14 páginasEstereoscopía: métodos y conceptos básicosLeo AgüeroAún no hay calificaciones
- S15.s2 - MaterialDocumento26 páginasS15.s2 - MaterialDiego Estefano Pichihua CarreraAún no hay calificaciones
- PerspectivaDocumento18 páginasPerspectivajuan perezAún no hay calificaciones
- 06.00 Cartografia y Fotogrametria 3 PDFDocumento52 páginas06.00 Cartografia y Fotogrametria 3 PDFJhonatan Francisco Villalobos AguilarAún no hay calificaciones
- Corrección del desplazamiento en fotografías aéreasDocumento4 páginasCorrección del desplazamiento en fotografías aéreasAnge ESTUDIOAún no hay calificaciones
- El Plano 2020Documento18 páginasEl Plano 2020Valentino PanivinoAún no hay calificaciones
- Cartografia y Fotogrametria Unidad 4Documento51 páginasCartografia y Fotogrametria Unidad 4Ed CotAún no hay calificaciones
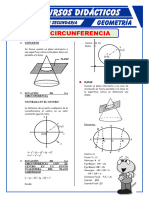
- CircunferenciaDocumento4 páginasCircunferenciaadrian SanchezAún no hay calificaciones
- FOTOGRAMETRIADocumento24 páginasFOTOGRAMETRIAPavel César MatamorosAún no hay calificaciones
- EmpujesDocumento36 páginasEmpujesMiguel FernandezAún no hay calificaciones
- 5to Conicas 4BDocumento7 páginas5to Conicas 4BANTONY BERTELLO OJEDAAún no hay calificaciones
- S14.s1 - IMAGENES FORMADAS POR ESPEJOS PLANOSDocumento17 páginasS14.s1 - IMAGENES FORMADAS POR ESPEJOS PLANOSAlexis Gabriel100% (1)
- Involuciones 3Documento10 páginasInvoluciones 3Eliza RomeroAún no hay calificaciones
- Imágenes por espejos y lentes: conceptos básicosDocumento24 páginasImágenes por espejos y lentes: conceptos básicosMarco Cisneros PachecoAún no hay calificaciones
- S015.s2 Material 2020Documento26 páginasS015.s2 Material 2020Aprende A ConducirAún no hay calificaciones
- Teoria de La Proyeccion Del PuntoDocumento10 páginasTeoria de La Proyeccion Del PuntoAdriana Torres SanchezAún no hay calificaciones
- Solución de problemas fotogramétricosDocumento49 páginasSolución de problemas fotogramétricossantiago silva100% (1)
- Ecuacion de La Circunferencia - ElipseDocumento6 páginasEcuacion de La Circunferencia - ElipseJOSE CAMPOS LLAJAAún no hay calificaciones
- Esfuerzos Transmitidos Por Cargas de ServicioDocumento29 páginasEsfuerzos Transmitidos Por Cargas de ServicioDiego RivasAún no hay calificaciones
- UTN AyGA PLANODocumento19 páginasUTN AyGA PLANOTomas YasparraAún no hay calificaciones
- Definiciones clave foto aéreaDocumento5 páginasDefiniciones clave foto aéreaKarol Mendez100% (1)
- Cap 4 Foto Inclinada ApunteDocumento17 páginasCap 4 Foto Inclinada ApunteOky Agustin Suparo TajiriAún no hay calificaciones
- 2013 12 185 Fotogrametria inDocumento18 páginas2013 12 185 Fotogrametria inManuel MichaelAún no hay calificaciones
- Sesión 04 - Calculo y Llevado de PendientesDocumento23 páginasSesión 04 - Calculo y Llevado de PendientesJhony Gavidia SAún no hay calificaciones
- Circunferencia y ángulosDocumento9 páginasCircunferencia y ángulosJuan AyalaAún no hay calificaciones
- Rectificación y OrtofotogrametríaDocumento20 páginasRectificación y Ortofotogrametríapiero mendoza timanáAún no hay calificaciones
- Cap 4 TEXTO Aerofoto Inclinada-Sist CoordDocumento19 páginasCap 4 TEXTO Aerofoto Inclinada-Sist CoordLiz Aguilar VásquezAún no hay calificaciones
- SEMANA 2 GD VIRTUAL 2020 II La RECTADocumento11 páginasSEMANA 2 GD VIRTUAL 2020 II La RECTAwsoncoAún no hay calificaciones
- INFORMEOPTICADocumento11 páginasINFORMEOPTICAJuan Manuel RuizAún no hay calificaciones
- Producto Integrador de Pensamiento Matematico IIIDocumento2 páginasProducto Integrador de Pensamiento Matematico IIIAnny Reyes TorresAún no hay calificaciones
- Diferencia de AlturasDocumento5 páginasDiferencia de Alturasjhon anyersson lopez ardilaAún no hay calificaciones
- Proyecto de VueloDocumento8 páginasProyecto de VueloFredo BahenaAún no hay calificaciones
- Correccion Desplazamiento RelieveDocumento15 páginasCorreccion Desplazamiento RelieveAndres Florez BonillaAún no hay calificaciones
- Proyecto Final Interpretacion Geometrica de La Derivada Parcial-Calculo Vectorial Semestre 4Documento8 páginasProyecto Final Interpretacion Geometrica de La Derivada Parcial-Calculo Vectorial Semestre 4Paula Andrea Lopez PinzonAún no hay calificaciones
- Fisica Ejercicios Resueltos Soluciones Optica Geometrica Selectividad Oxford 140331214417 Phpapp01Documento12 páginasFisica Ejercicios Resueltos Soluciones Optica Geometrica Selectividad Oxford 140331214417 Phpapp01Paula CutipaAún no hay calificaciones
- Final Fotogrametria 2Documento6 páginasFinal Fotogrametria 2pedro donoso ramirezAún no hay calificaciones
- U3 Optica 2 OptimizadoDocumento10 páginasU3 Optica 2 OptimizadoL2 WeirdAún no hay calificaciones
- Apunte OpticaDocumento13 páginasApunte OpticaLeandro Ariel MaldonadoAún no hay calificaciones
- Geometria de La Elipse - 2019!0!1Documento33 páginasGeometria de La Elipse - 2019!0!1alex junior landa valdez100% (1)
- Problemas de Fotogrametria-ElementosDocumento22 páginasProblemas de Fotogrametria-ElementosDania MenesesAún no hay calificaciones
- El Punto, La Linea y El Plano en La Geometria DescriptivaDocumento19 páginasEl Punto, La Linea y El Plano en La Geometria DescriptivaDiana libeth Barrera AcostaAún no hay calificaciones
- 3 Tercera Semana Escala de Una Fotografia AereaDocumento22 páginas3 Tercera Semana Escala de Una Fotografia Aereadavid lusoAún no hay calificaciones
- S15 S2-MaterialDocumento37 páginasS15 S2-MaterialKEVIN SANCHEZ LLASACAAún no hay calificaciones
- La Circunferencia Geometría Analítica para Quinto de SecundariaDocumento8 páginasLa Circunferencia Geometría Analítica para Quinto de SecundariaMicaelaAún no hay calificaciones
- Teoría 02 - GD 2023-2Documento37 páginasTeoría 02 - GD 2023-2Jennifer Sanchez GonzalesAún no hay calificaciones
- Semana22 Circunferencia y ParábolaDocumento5 páginasSemana22 Circunferencia y ParábolaDiego MartinezAún no hay calificaciones
- S15 S2 MaterialDocumento25 páginasS15 S2 MaterialJakia ChowdhuryAún no hay calificaciones
- Diferencia de AlturaDocumento8 páginasDiferencia de AlturaJuan Sebastián Guzmán100% (1)
- Anteojo Prisma¿ticoDocumento12 páginasAnteojo Prisma¿ticoSer Galez 1.0Aún no hay calificaciones
- CAP. V PROYECCION ORTOGONAL - Geometria DescriptivaDocumento20 páginasCAP. V PROYECCION ORTOGONAL - Geometria DescriptivaLUIS ANDRE TITO HUAYLLAAún no hay calificaciones
- PI - Viabilidad de PIPDocumento9 páginasPI - Viabilidad de PIPJorge Jesús Morales GonzálezAún no hay calificaciones
- 6.lista de Insumos Impac. Amb.Documento1 página6.lista de Insumos Impac. Amb.Jorge Jesús Morales GonzálezAún no hay calificaciones
- Presupuesto: Universidad Nacional Amazonica de Madre de DiosDocumento23 páginasPresupuesto: Universidad Nacional Amazonica de Madre de DiosJorge Jesús Morales GonzálezAún no hay calificaciones
- Uo LFLRM.J .Ú.M.1) .H ................................ .: Infórme Técnico N - L932.2016-Servir/GpgscDocumento4 páginasUo LFLRM.J .Ú.M.1) .H ................................ .: Infórme Técnico N - L932.2016-Servir/GpgscJorge Jesús Morales GonzálezAún no hay calificaciones
- Brochure - 006 2019 CG PDFDocumento10 páginasBrochure - 006 2019 CG PDFCarlos Manuel Alva VargasAún no hay calificaciones
- ExportacionDocumento3 páginasExportacionJorge Jesús Morales GonzálezAún no hay calificaciones
- ExportacionDocumento3 páginasExportacionJorge Jesús Morales GonzálezAún no hay calificaciones
- Cuv Tutaya Maria 5442143250090Documento4 páginasCuv Tutaya Maria 5442143250090Ricardo Solis TAún no hay calificaciones
- Boarding Pass Abril-2018Documento1 páginaBoarding Pass Abril-2018Jorge Jesús Morales GonzálezAún no hay calificaciones
- Anexo-1 TORs 83270303-17Documento6 páginasAnexo-1 TORs 83270303-17Jorge Jesús Morales GonzálezAún no hay calificaciones
- ExportacionDocumento3 páginasExportacionJorge Jesús Morales GonzálezAún no hay calificaciones
- Buenas Practicas Control Interno 001 Mayo2020Documento4 páginasBuenas Practicas Control Interno 001 Mayo2020Paola Córdova CubaAún no hay calificaciones
- ExportacionDocumento2 páginasExportacionJorge Jesús Morales GonzálezAún no hay calificaciones
- ExportacionDocumento3 páginasExportacionJorge Jesús Morales GonzálezAún no hay calificaciones
- 3.lista de Insumos ArqDocumento3 páginas3.lista de Insumos ArqJorge Jesús Morales GonzálezAún no hay calificaciones
- 4.lista de Insumos SanitDocumento2 páginas4.lista de Insumos SanitJorge Jesús Morales GonzálezAún no hay calificaciones
- Formato A - Identificar RiesgosDocumento1 páginaFormato A - Identificar RiesgosJorge Jesús Morales GonzálezAún no hay calificaciones
- 5.lista de Insumos ElectricasDocumento2 páginas5.lista de Insumos ElectricasJorge Jesús Morales GonzálezAún no hay calificaciones
- Gestión de Riesgos en la Disposición de Residuos SólidosDocumento71 páginasGestión de Riesgos en la Disposición de Residuos SólidosRoosvelt Coz TuctoAún no hay calificaciones
- Instructivo de Gestión de Acceso Al Aplicativo Informático Del SCI Set2019Documento14 páginasInstructivo de Gestión de Acceso Al Aplicativo Informático Del SCI Set2019Marcial Pomachagua VegaAún no hay calificaciones
- Formato C - Plan de Acción Anual - Sección Medidas de ControlDocumento2 páginasFormato C - Plan de Acción Anual - Sección Medidas de ControlJorge Jesús Morales GonzálezAún no hay calificaciones
- Formato B - Valorar Riesgos y Establecer Medidas de ControlDocumento1 páginaFormato B - Valorar Riesgos y Establecer Medidas de ControlJorge Jesús Morales GonzálezAún no hay calificaciones
- Flujo para La Elaboración Del Plan de Acción - Medidas de ControlDocumento1 páginaFlujo para La Elaboración Del Plan de Acción - Medidas de ControlRoosvelt Coz TuctoAún no hay calificaciones
- Capacitación Municipalidades Implementación Del SCI Junio 2020 PDFDocumento55 páginasCapacitación Municipalidades Implementación Del SCI Junio 2020 PDFJean Deyvid Arias GarciaAún no hay calificaciones
- Ficha56 - Previsiones - MPTDocumento1 páginaFicha56 - Previsiones - MPTJorge Jesús Morales GonzálezAún no hay calificaciones
- Programa de La CapacitaciónDocumento1 páginaPrograma de La CapacitaciónJorge Jesús Morales GonzálezAún no hay calificaciones
- Reporte Ejecucion Del Gasto - 2018Documento42 páginasReporte Ejecucion Del Gasto - 2018Jorge Jesús Morales GonzálezAún no hay calificaciones
- Reporte Ejecucion Del Gasto - 2017Documento51 páginasReporte Ejecucion Del Gasto - 2017Jorge Jesús Morales GonzálezAún no hay calificaciones
- Reporte Ejecucion Del Gasto - 2019Documento55 páginasReporte Ejecucion Del Gasto - 2019Jorge Jesús Morales GonzálezAún no hay calificaciones
- Reporte Ejecucion Del Gasto - 2020Documento47 páginasReporte Ejecucion Del Gasto - 2020Jorge Jesús Morales GonzálezAún no hay calificaciones
- Análisis Del Escenario Del ProblemaDocumento11 páginasAnálisis Del Escenario Del ProblemaBellaNavarroAún no hay calificaciones
- Prob 7Documento3 páginasProb 7Ciph UnacAún no hay calificaciones
- Taller Interes SimpleDocumento2 páginasTaller Interes SimpleCalo Ortiz100% (1)
- Bateria PPT OkDocumento31 páginasBateria PPT OkLuis Alberto Carpio NuñezAún no hay calificaciones
- PETS-CO-029 Rev. 00 Excavacion de CalzadurasDocumento19 páginasPETS-CO-029 Rev. 00 Excavacion de CalzadurasDeiry Yurita Silva FloresAún no hay calificaciones
- Ley de Ohm: Medición de resistencias y comprobación de la leyDocumento6 páginasLey de Ohm: Medición de resistencias y comprobación de la leyNgl Salvador PalaAún no hay calificaciones
- Ejemplo 2Documento44 páginasEjemplo 2Yadira ChavezAún no hay calificaciones
- Calentador de Vapor DirectoDocumento7 páginasCalentador de Vapor DirectoJORDYAún no hay calificaciones
- Autónomo N2 Enfermedades de La PielDocumento5 páginasAutónomo N2 Enfermedades de La PielMarjhorie CaraguayAún no hay calificaciones
- Analisis de Regresion y Correlacion LinealDocumento3 páginasAnalisis de Regresion y Correlacion LinealVictor DVAún no hay calificaciones
- 7 Principios para Pensar Como Leonardo Da VinciDocumento2 páginas7 Principios para Pensar Como Leonardo Da VinciSergio Avalos100% (1)
- 20 SeñalizaciónDocumento12 páginas20 SeñalizaciónCarlos CotoAún no hay calificaciones
- Auditorio de la URSE en Oaxaca con diseño contemporáneo y tecnología de puntaDocumento5 páginasAuditorio de la URSE en Oaxaca con diseño contemporáneo y tecnología de puntaimhamscAún no hay calificaciones
- Por qué Dios permite el malDocumento5 páginasPor qué Dios permite el malJuan Carlos EberhardtAún no hay calificaciones
- Plan de vida personal y equilibrioDocumento23 páginasPlan de vida personal y equilibrioMILENA HERNANDEZ AMAYAAún no hay calificaciones
- Reforma Total de La Ordenanza Sobre Vehículos.Documento15 páginasReforma Total de La Ordenanza Sobre Vehículos.taborAún no hay calificaciones
- Los peligros del alcohol en el trabajoDocumento1 páginaLos peligros del alcohol en el trabajoFrancisco DélanoAún no hay calificaciones
- Gammapatías monoclonales y Mieloma MúltipleDocumento37 páginasGammapatías monoclonales y Mieloma MúltipleOscar ValerAún no hay calificaciones
- Atencion Primaria de SaludDocumento7 páginasAtencion Primaria de SaludGraciela Estrada PortocarreroAún no hay calificaciones
- Calculo Por Elementos FinitosDocumento4 páginasCalculo Por Elementos FinitosAndrea AcuñaAún no hay calificaciones
- Menú Cocina Zakani Pereira CerritosDocumento23 páginasMenú Cocina Zakani Pereira CerritosMr. MiloxAún no hay calificaciones
- 03.025 Alteraciones de Las Plaquetas. Etiopatogenia, Clasificación, Manifestaciones Clínicas, Diagnóstico y Actitudes TerapéuticasDocumento14 páginas03.025 Alteraciones de Las Plaquetas. Etiopatogenia, Clasificación, Manifestaciones Clínicas, Diagnóstico y Actitudes TerapéuticasGustavo AraujoAún no hay calificaciones
- Ud 2 - Valoración InicialDocumento39 páginasUd 2 - Valoración InicialKiddà Și AtâtAún no hay calificaciones
- Actividad4 Procesoindustriale CHDocumento16 páginasActividad4 Procesoindustriale CHAlfredo CoronadoAún no hay calificaciones
- Analisis de Falla de Una Brida de Acero Al CarnonoDocumento10 páginasAnalisis de Falla de Una Brida de Acero Al CarnonoSAún no hay calificaciones
- F DSM p66 25 1 0 Registro de Experiencia Basica Categoria L Veleros y MotovelerosDocumento13 páginasF DSM p66 25 1 0 Registro de Experiencia Basica Categoria L Veleros y MotoveleroscarlospadillavegahelicopterosAún no hay calificaciones