También podría gustarte
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- 50 - Sermones ParaToda OcasionDocumento136 páginas50 - Sermones ParaToda OcasionLeomat0% (1)
- 50 - Sermones ParaToda OcasionDocumento136 páginas50 - Sermones ParaToda OcasionLeomat0% (1)
- emas de ntrol Con Plcmas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas deDocumento61 páginasemas de ntrol Con Plcmas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas de Control Con PlcSistemas dejenson100% (2)
- PLCDocumento52 páginasPLCsuero100Aún no hay calificaciones
- La Placa ElectrónicaDocumento18 páginasLa Placa ElectrónicaAlejo Nahuel Perez Demaestri100% (1)
- Automatizacion Con PlcsDocumento129 páginasAutomatizacion Con PlcsPreceptor SomaAún no hay calificaciones
- Tarjeta de Aire AcondicionadoDocumento17 páginasTarjeta de Aire AcondicionadoMechín Rodriguez EjvrAún no hay calificaciones
- 01 - Descripción GeneralDocumento27 páginas01 - Descripción GeneralPedroAún no hay calificaciones
- Curso Automatizacion - SchneiderDocumento37 páginasCurso Automatizacion - SchneiderCarlosalvAún no hay calificaciones
- 7 Comunicación Efectiva y Negociación (Diapositivas 7)Documento29 páginas7 Comunicación Efectiva y Negociación (Diapositivas 7)gabriel chunga yucraAún no hay calificaciones
- Actuadores Coester (Español)Documento22 páginasActuadores Coester (Español)HJ100% (1)
- Control para TranferenciasDocumento2 páginasControl para Tranferenciasjuliusfiggs0% (1)
- Control de Variables Analogicas Con PLC IIDocumento18 páginasControl de Variables Analogicas Con PLC IIRicky Mclaughlin100% (2)
- Informe Control de FaseDocumento10 páginasInforme Control de FaseFernanda MorenoAún no hay calificaciones
- Tema 5 - Dispositivos PDFDocumento21 páginasTema 5 - Dispositivos PDFYohaly PerezAún no hay calificaciones
- 43 Reservorio Elevado 15 m3 - Calculo EstructuralDocumento43 páginas43 Reservorio Elevado 15 m3 - Calculo Estructuralepazt12-1100% (3)
- Llenado Tanque CisternaDocumento57 páginasLlenado Tanque CisternaGermán Gabriel FernandezAún no hay calificaciones
- Funciones Básicas de Un PLCDocumento16 páginasFunciones Básicas de Un PLCgustavoAún no hay calificaciones
- Control Electrónico en Aire AcondicionadoDocumento16 páginasControl Electrónico en Aire Acondicionadolmelendezi100% (1)
- AUTOMATISMODocumento68 páginasAUTOMATISMOJean Carlos Huerta DiazAún no hay calificaciones
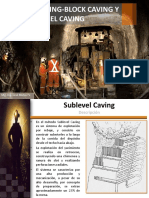
- Caving - Selección Métodos - EjeDocumento138 páginasCaving - Selección Métodos - EjeMilko Leguas RodríguezAún no hay calificaciones
- Texto 5Documento14 páginasTexto 5diego valdiviaAún no hay calificaciones
- CUESTIONES TEMA 4 PLCs - SolucionesDocumento5 páginasCUESTIONES TEMA 4 PLCs - SolucionesEduar Jara AlcaldeAún no hay calificaciones
- Controladores de ProcesosDocumento41 páginasControladores de ProcesosPPAPARICIOAún no hay calificaciones
- Clase 1 - 2 - Inacap - PLC - FDocumento94 páginasClase 1 - 2 - Inacap - PLC - FpelechatorAún no hay calificaciones
- Controladores Digitales TECS UP PDFDocumento10 páginasControladores Digitales TECS UP PDFHuber Romero ZevallosAún no hay calificaciones
- Materia de ApoyoDocumento39 páginasMateria de ApoyoEstudiantilAún no hay calificaciones
- El Control Digital en La IndustriaDocumento8 páginasEl Control Digital en La IndustriaJuan GalvesAún no hay calificaciones
- Apuntes PLCDocumento8 páginasApuntes PLCEdgar Uriel Hernández MartínezAún no hay calificaciones
- RPMDocumento18 páginasRPMLeonid RamosAún no hay calificaciones
- 2.3. Prepa PWM BUCKDocumento13 páginas2.3. Prepa PWM BUCKCristianGordilloAún no hay calificaciones
- Medidor de Velocidad RFDocumento4 páginasMedidor de Velocidad RFHeiner Madera DuarteAún no hay calificaciones
- Separata 1 PDFDocumento19 páginasSeparata 1 PDFCristian Uchasara CasavilcaAún no hay calificaciones
- Control Electrónico Tarjetas AADocumento22 páginasControl Electrónico Tarjetas AAbj bjaAún no hay calificaciones
- 01 Resumen Automatismos2Documento4 páginas01 Resumen Automatismos2Williams FernandezAún no hay calificaciones
- Control PIDDocumento20 páginasControl PIDJuan DavidAún no hay calificaciones
- Manual PLC Eopus Cp04Documento14 páginasManual PLC Eopus Cp04Alex AriasAún no hay calificaciones
- Ref 630Documento36 páginasRef 630Noah Guillen Meza100% (3)
- 2022 Preguntas Final 01 - 06Documento57 páginas2022 Preguntas Final 01 - 06Lu ReynosoAún no hay calificaciones
- CAT AVR Español 10Documento8 páginasCAT AVR Español 10Victor MatamorosAún no hay calificaciones
- PLC PUEB ModificadoDocumento28 páginasPLC PUEB ModificadoHugo Andonegui0% (1)
- Control de CaudalDocumento11 páginasControl de CaudalNacho TorresAún no hay calificaciones
- Control Electrónico: Sistemas y EtapasDocumento17 páginasControl Electrónico: Sistemas y EtapasJimi rueda iguaranAún no hay calificaciones
- Reporte Lm35Documento30 páginasReporte Lm35LoRe CaStánAún no hay calificaciones
- Informe Proyecto AutoDocumento18 páginasInforme Proyecto AutoLuis BriceñoAún no hay calificaciones
- CR1000X DataloggerDocumento2 páginasCR1000X DataloggerBeatriz BeltránAún no hay calificaciones
- Relevadores Programables (Completo)Documento55 páginasRelevadores Programables (Completo)Juan GilAún no hay calificaciones
- Supervisión y Automatización IndustrialDocumento17 páginasSupervisión y Automatización Industrialvalery.vargas.cAún no hay calificaciones
- Folleto RGDocumento4 páginasFolleto RGlimbert_Aún no hay calificaciones
- Capitulo 1Documento99 páginasCapitulo 1Wilmer MarinAún no hay calificaciones
- Introducción RSLogixDocumento32 páginasIntroducción RSLogixsmejiagonzalesAún no hay calificaciones
- Indicador Configurable Con Alarmas Y Control Pid: Con Opción Comunicación RS-485 ModbusDocumento2 páginasIndicador Configurable Con Alarmas Y Control Pid: Con Opción Comunicación RS-485 Modbussmaj1973Aún no hay calificaciones
- Curso de Programación PLC 2020 - v2Documento45 páginasCurso de Programación PLC 2020 - v2AugustoAún no hay calificaciones
- FJFGJDocumento10 páginasFJFGJBrahyan Contreras MesiasAún no hay calificaciones
- Salida Tipo Transistor Del PLCDocumento3 páginasSalida Tipo Transistor Del PLCJose Freddy Quispe BustinzaAún no hay calificaciones
- Control de fase directo con ArduinoDocumento7 páginasControl de fase directo con ArduinoEfren QuilumbaAún no hay calificaciones
- Supervisor de TransformadoresDocumento8 páginasSupervisor de Transformadoresjorge_moralesmAún no hay calificaciones
- ControlNivelLeche12VDocumento29 páginasControlNivelLeche12VAngel CAún no hay calificaciones
- Sesión 06, Sensores, Amplificadores y ReguladoresDocumento84 páginasSesión 06, Sensores, Amplificadores y ReguladoresKevin Segundo BarrenecheaAún no hay calificaciones
- Control Electrónico en Aires AcondicionadosDocumento13 páginasControl Electrónico en Aires AcondicionadosHECTORAún no hay calificaciones
- Control Electrónico Aire Acondicionado Mini SplitDocumento14 páginasControl Electrónico Aire Acondicionado Mini SplittalentoAún no hay calificaciones
- 2240 Sel AxionDocumento16 páginas2240 Sel AxionEdmundo MuñozAún no hay calificaciones
- 7310-7320 VentasDocumento4 páginas7310-7320 Ventasruyolmos_zeroAún no hay calificaciones
- Trabajo Colaborativo 2 Control DigitalDocumento65 páginasTrabajo Colaborativo 2 Control DigitalCristianCChDelgadoAún no hay calificaciones
- Viscocidad, Labo FisicaDocumento1 páginaViscocidad, Labo FisicajaimeAún no hay calificaciones
- Controladores DigitalesDocumento20 páginasControladores Digitalesalcar1990Aún no hay calificaciones
- Trabajo Colaborativo 2 Control DigitalDocumento65 páginasTrabajo Colaborativo 2 Control DigitalCristianCChDelgadoAún no hay calificaciones
- CuadroDocumento4 páginasCuadrojaimeAún no hay calificaciones
- ProyectoDocumento4 páginasProyectojaimeAún no hay calificaciones
- Física y Su ImportanciaDocumento1 páginaFísica y Su ImportanciajaimeAún no hay calificaciones
- Controladores DigitalesDocumento46 páginasControladores DigitalesjaimeAún no hay calificaciones
- Controlador PID DigitalDocumento3 páginasControlador PID DigitaljaimeAún no hay calificaciones
- ProyectoDocumento20 páginasProyectojaimeAún no hay calificaciones
- CuerpoDocumento31 páginasCuerpojaimeAún no hay calificaciones
- CuerpoDocumento31 páginasCuerpojaimeAún no hay calificaciones
- CuerpoDocumento31 páginasCuerpojaimeAún no hay calificaciones
- Final Tele 4Documento10 páginasFinal Tele 4jaimeAún no hay calificaciones
- Informe CeramicosDocumento4 páginasInforme CeramicosNicolas Rios0% (2)
- Revista Ingeniería y Tecnología No. 19Documento68 páginasRevista Ingeniería y Tecnología No. 19LleiLleiAún no hay calificaciones
- Reporte Polímeros (ESPOL)Documento6 páginasReporte Polímeros (ESPOL)Andrés EspinozaAún no hay calificaciones
- La Estadística y El Método CientíficoDocumento4 páginasLa Estadística y El Método CientíficoDania Arenas100% (1)
- Vdocuments - MX Roberts Jane Habla Seth IDocumento39 páginasVdocuments - MX Roberts Jane Habla Seth IVictor FunesAún no hay calificaciones
- Especificaciones Tecnicas ElectricasDocumento14 páginasEspecificaciones Tecnicas Electricasderlis navarreteAún no hay calificaciones
- Manual MCLTE-S EspañolDocumento40 páginasManual MCLTE-S EspañolWILLIAMSERNALOPEZAún no hay calificaciones
- Actividad de evaluación de cinemáticaDocumento9 páginasActividad de evaluación de cinemáticaKiara Oyarce y Mirian AguilarAún no hay calificaciones
- Álgebra de FuncionesDocumento8 páginasÁlgebra de Funcionesmafe2507Aún no hay calificaciones
- Identificar tipos de ecuaciones diferenciales de primer ordenDocumento2 páginasIdentificar tipos de ecuaciones diferenciales de primer ordenDanny ZabalaAún no hay calificaciones
- EfresDocumento7 páginasEfresandres navarroAún no hay calificaciones
- Normas de Uso de CloroDocumento9 páginasNormas de Uso de CloroMauricio VillamizarAún no hay calificaciones
- Monografia de FraguadoDocumento13 páginasMonografia de FraguadoERICKAún no hay calificaciones
- Introducción: Laboratorio de Física Mecánica Guía No: 4 Movimiento Uniformemente AceleradoDocumento8 páginasIntroducción: Laboratorio de Física Mecánica Guía No: 4 Movimiento Uniformemente AceleradoDana Carolina CollazosAún no hay calificaciones
- Certamen 2 Darras NataliaDocumento10 páginasCertamen 2 Darras NataliaNatalia Fernanda DarrasAún no hay calificaciones
- Fase 3 - TestDocumento1 páginaFase 3 - TestYeimmy Julieth Cardenas MillanAún no hay calificaciones
- Actividad de Aprendizaje 2 - Cuadro Comparativo de La Filosofía PresocráticaDocumento2 páginasActividad de Aprendizaje 2 - Cuadro Comparativo de La Filosofía PresocráticaJuan Carlos Gonzalez Requena88% (8)
- Tema 5Documento26 páginasTema 5Ana Sansano PérezAún no hay calificaciones
- Quimica Configuracion Electronica y Modelos AtómicosDocumento4 páginasQuimica Configuracion Electronica y Modelos AtómicosVargas Santamaría Rodrigo UlisesAún no hay calificaciones
- 2 Viscosidad y DensidadDocumento23 páginas2 Viscosidad y DensidadLaura RondánAún no hay calificaciones
- Espectrometria Atomica y MolecularDocumento61 páginasEspectrometria Atomica y MolecularDavid Rivas MacasAún no hay calificaciones
- Herramienta CBLDocumento7 páginasHerramienta CBLAlexander QuispeAún no hay calificaciones
- Tecnológico Nacional de México - Transferencia de CalorDocumento3 páginasTecnológico Nacional de México - Transferencia de CalorAdrian CastroAún no hay calificaciones
- Análisis de Cargas VialesDocumento9 páginasAnálisis de Cargas VialesfrancodlhAún no hay calificaciones
- Control RefractariosDocumento4 páginasControl RefractariosLeonardo Paul ZavaletaAún no hay calificaciones
- Teorema Poynting ecuación flujo potencia ondas electromagnéticasDocumento1 páginaTeorema Poynting ecuación flujo potencia ondas electromagnéticasEduardo OrnelasAún no hay calificaciones
- La Gaviota y El PinguinoDocumento16 páginasLa Gaviota y El PinguinoErnestho MolinaAún no hay calificaciones