También podría gustarte
- Amplificador de AislamientoDocumento22 páginasAmplificador de AislamientoEdson C Huanquis100% (1)
- Motor Con Dos CondensadoresDocumento14 páginasMotor Con Dos CondensadoresEdson C HuanquisAún no hay calificaciones
- 3.4 Introduccion A Control Digital 2Documento80 páginas3.4 Introduccion A Control Digital 2Edson C HuanquisAún no hay calificaciones
- Manual - Excel Profesional PDFDocumento248 páginasManual - Excel Profesional PDFEdson C HuanquisAún no hay calificaciones
- Egresados IEESL 2014-2020Documento2 páginasEgresados IEESL 2014-2020solracleugimAún no hay calificaciones
- TroyanoDocumento6 páginasTroyanoSarayAún no hay calificaciones
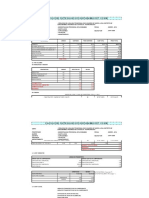
- Calculo de FleteDocumento3 páginasCalculo de FleteCristianRolerPerezChilconAún no hay calificaciones
- Acabados y AlbañileriaDocumento8 páginasAcabados y AlbañileriaEstefany Hinostroza RiveraAún no hay calificaciones
- Almacenamiento de HidrocarburosDocumento68 páginasAlmacenamiento de HidrocarburosYuliiana HernandezAún no hay calificaciones
- U4 - Generadores de Vapor - GastonDocumento25 páginasU4 - Generadores de Vapor - GastonPablete DavicinoAún no hay calificaciones
- Computación para Todos (Primaria) - 1er GradoDocumento16 páginasComputación para Todos (Primaria) - 1er GradoMarcos TorresAún no hay calificaciones
- Curso Básico de Montaje de Andamio 2017 Chilecap - Rev01 - CodelcoDocumento40 páginasCurso Básico de Montaje de Andamio 2017 Chilecap - Rev01 - Codelcojose gonzalezAún no hay calificaciones
- Solucion CasoDocumento15 páginasSolucion Casofredy100% (4)
- HINO GH8J Camion Largo PDFDocumento4 páginasHINO GH8J Camion Largo PDFJuan Guillermo Romero AcevedoAún no hay calificaciones
- Control de Motor y Ventilador PWM Con 555Documento12 páginasControl de Motor y Ventilador PWM Con 555Rafael CatagñaAún no hay calificaciones
- Procedimientos Constructivos IIDocumento11 páginasProcedimientos Constructivos IICarlos Eduardo MoranAún no hay calificaciones
- Especificacion de Requerimientos SoftwareDocumento8 páginasEspecificacion de Requerimientos SoftwareEulaliaCorralesAún no hay calificaciones
- Manual DFDDocumento11 páginasManual DFDYanina Liz Gutierrez AdriazolaAún no hay calificaciones
- Taller Ejercicios N°1 Omar Saker-Adrián Córdoba PDFDocumento22 páginasTaller Ejercicios N°1 Omar Saker-Adrián Córdoba PDFOMAR ALI SAKER MONTENEGROAún no hay calificaciones
- E BookDocumento404 páginasE BookRonal SalvatierraAún no hay calificaciones
- Tercera Entrega TelecomunicacionesDocumento5 páginasTercera Entrega Telecomunicacionescarlos giovanny leal ospinaAún no hay calificaciones
- Uso de TabHostDocumento4 páginasUso de TabHostTeffy Lavado Gomez0% (1)
- Universidades Públicas de La Comunidad de Madrid: A1.-R y A Una Circunferencia de Centro O en El Punto TDocumento10 páginasUniversidades Públicas de La Comunidad de Madrid: A1.-R y A Una Circunferencia de Centro O en El Punto TMar BlancoAún no hay calificaciones
- Filtro Canasta Bridado Hierro Fundido 125lbsDocumento1 páginaFiltro Canasta Bridado Hierro Fundido 125lbsHenry PorcoAún no hay calificaciones
- Balance de Masas - PlantroDocumento30 páginasBalance de Masas - PlantroKamik LópezAún no hay calificaciones
- Man 8050m UserDocumento632 páginasMan 8050m UserMarcelo Andrés Moreno Pavez100% (1)
- ¿Puedo Congelar Algun LiquidoDocumento11 páginas¿Puedo Congelar Algun LiquidoMiriam CuestaAún no hay calificaciones
- Variables AleatoriasDocumento4 páginasVariables AleatoriasNatali AngaritaAún no hay calificaciones
- 031 Mantenimiento de Instalaciones y Sistemas NeumaticosDocumento76 páginas031 Mantenimiento de Instalaciones y Sistemas NeumaticosJiovanni Montoya75% (4)
- Trabajo de Investigacion Sobre Inundaciones1Documento14 páginasTrabajo de Investigacion Sobre Inundaciones1Alvaro CarpioAún no hay calificaciones
- Norma de Metrados RD 2010 073 DNCDocumento5 páginasNorma de Metrados RD 2010 073 DNCAnonymous HtvuyS8GAún no hay calificaciones
- Certificados Grapas Suspension y Retencion 2019Documento4 páginasCertificados Grapas Suspension y Retencion 2019Arys HerreraAún no hay calificaciones
- Venoco Ci 4sl Multigrado Sae 20w50Documento2 páginasVenoco Ci 4sl Multigrado Sae 20w50Fernando PadillaAún no hay calificaciones
- Grandez Ramírez Erick y Vallejos Dávila Nelson - TesisDocumento129 páginasGrandez Ramírez Erick y Vallejos Dávila Nelson - TesisTaísBegazoCastilloAún no hay calificaciones