También podría gustarte
- Energy Efficient Turbo BlowersDocumento11 páginasEnergy Efficient Turbo BlowersnishanandAún no hay calificaciones
- Boiler Feed Pump SavingDocumento28 páginasBoiler Feed Pump SavingDramebaaz SandeepAún no hay calificaciones
- Condenser Performance SolutionsDocumento12 páginasCondenser Performance SolutionsSubrata Das100% (1)
- Burner Tilt PDFDocumento9 páginasBurner Tilt PDFEE POG-III CSTPSAún no hay calificaciones
- RGMO Frequency Influence SchemeDocumento1 páginaRGMO Frequency Influence SchemeJitendra SharmaAún no hay calificaciones
- Turbine Condensate and Feed Water SystemDocumento37 páginasTurbine Condensate and Feed Water SystemShubham VermaAún no hay calificaciones
- Centrifugal PurifiersDocumento14 páginasCentrifugal PurifiersImran PatelAún no hay calificaciones
- Maximizing Plant Performance with Coordinated Boiler and Turbine ControlDocumento28 páginasMaximizing Plant Performance with Coordinated Boiler and Turbine ControlJhoAún no hay calificaciones
- Modern ControlDocumento16 páginasModern ControlBM100% (1)
- Turbine Supervisory InstrumentsationDocumento52 páginasTurbine Supervisory InstrumentsationKarthi KeyanAún no hay calificaciones
- 3) Air Ingress in A BoilerDocumento48 páginas3) Air Ingress in A Boilerpalamwaranil100% (2)
- Paper 5-CMC Implementation Unchahar PDFDocumento48 páginasPaper 5-CMC Implementation Unchahar PDFumeshAún no hay calificaciones
- Electro Static Recepetator (ESP)Documento23 páginasElectro Static Recepetator (ESP)Parveen NakwalAún no hay calificaciones
- Coal FeedDocumento8 páginasCoal FeedaakashtrivediAún no hay calificaciones
- Boiler water level control loop diagramDocumento58 páginasBoiler water level control loop diagramNandkumar KhachaneAún no hay calificaciones
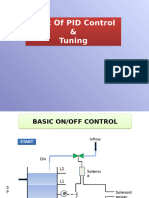
- PID Control Explained in 40 CharactersDocumento52 páginasPID Control Explained in 40 CharactersShivaji Thube100% (1)
- Digital Electro Hydraulic Governing System PresentationDocumento38 páginasDigital Electro Hydraulic Governing System PresentationNaveenAún no hay calificaciones
- Presentation On DVR, JS Saroya, CS Singh, 03.12.11Documento75 páginasPresentation On DVR, JS Saroya, CS Singh, 03.12.11Amit BiswasAún no hay calificaciones
- NEW BELTWEIGHER STD MANUALmodified)Documento57 páginasNEW BELTWEIGHER STD MANUALmodified)mecblAún no hay calificaciones
- Available Online Through: Research ArticleDocumento10 páginasAvailable Online Through: Research ArticleAurobinda MishraAún no hay calificaciones
- Siemens Belt ScalesDocumento66 páginasSiemens Belt ScalesGilbertDominguezAún no hay calificaciones
- Report EHTC HuntingDocumento10 páginasReport EHTC HuntingOTPC POWERAún no hay calificaciones
- CFBC Boiler Scale UpDocumento14 páginasCFBC Boiler Scale UpBijoy B MenonAún no hay calificaciones
- Chapter 8 Fuel Firing SystemDocumento6 páginasChapter 8 Fuel Firing SystemBineet Kumar VarmaAún no hay calificaciones
- Ads A TG Integral Block Speed B 100 S B 3000 2900 - X T MIN MAX I SDocumento5 páginasAds A TG Integral Block Speed B 100 S B 3000 2900 - X T MIN MAX I SRamakrishnan NatarajanAún no hay calificaciones
- 3 Element Boiler Drum LevelDocumento2 páginas3 Element Boiler Drum LevelAmir Yousaf100% (1)
- Drum Level Control Basics ExplainedDocumento3 páginasDrum Level Control Basics ExplainedSiva Subramaniyan100% (1)
- Acceleration Amplitude Demodulation IN Predictive MaintenanceDocumento8 páginasAcceleration Amplitude Demodulation IN Predictive MaintenanceronfrendAún no hay calificaciones
- Turbine Rolling Procedure Pre Rolling ActivitiesDocumento7 páginasTurbine Rolling Procedure Pre Rolling ActivitiesPrakash Choudhary100% (1)
- Turbine Stress Evaluator (Tse) Turbine Stress Evaluator)Documento3 páginasTurbine Stress Evaluator (Tse) Turbine Stress Evaluator)Prakash ChoudharyAún no hay calificaciones
- PPE Unit IIDocumento114 páginasPPE Unit IIHD Movies DownloadAún no hay calificaciones
- Lecture 27 Model Steam Turbine Gov SystemDocumento60 páginasLecture 27 Model Steam Turbine Gov Systempk cfctkAún no hay calificaciones
- Combustion Control System For A Marine BoilerDocumento2 páginasCombustion Control System For A Marine Boilermavericksailor100% (2)
- T30Documento4 páginasT30V P Singh0% (1)
- Turbine Control and Efficiency ImporovementDocumento6 páginasTurbine Control and Efficiency ImporovementUdhayakumar Venkataraman100% (1)
- Turbine Supervisory System ParametersDocumento34 páginasTurbine Supervisory System ParametersSuman GhoshAún no hay calificaciones
- Boiler Notes 2Documento42 páginasBoiler Notes 2Balakrishnan KannanAún no hay calificaciones
- Inert Gas SystemDocumento3 páginasInert Gas Systemmehedi2636Aún no hay calificaciones
- CFBC DatasheetsDocumento5 páginasCFBC Datasheetsanimesh907100% (1)
- Turbine Supervisory InstrumentationDocumento3 páginasTurbine Supervisory InstrumentationMAS98Aún no hay calificaciones
- Precautions to avoid 500MW turbine barring gear stallingDocumento2 páginasPrecautions to avoid 500MW turbine barring gear stallingSrinivas BudatiAún no hay calificaciones
- 06 StemLeakDetectionSystemDocumento32 páginas06 StemLeakDetectionSystemSACHIN PETKAR100% (1)
- Discussion Cooling TowersDocumento2 páginasDiscussion Cooling TowersHanny100% (1)
- KnittingDocumento11 páginasKnittingSuza Ahmed AuporboAún no hay calificaciones
- 1 Turbine ProtectionDocumento16 páginas1 Turbine ProtectionAnonymous 0lB7qDRMbO100% (1)
- Chapter 12Documento12 páginasChapter 12bhaskarAún no hay calificaciones
- ISO 9001 Belt Weigher IndicatorDocumento2 páginasISO 9001 Belt Weigher Indicatorjdrana100% (1)
- Generator Electrical Test #3Documento2 páginasGenerator Electrical Test #3Santoshkumar GuptaAún no hay calificaciones
- Boilers 101 PDFDocumento27 páginasBoilers 101 PDFsppatilAún no hay calificaciones
- Boiler Dry To Wet ModeDocumento1 páginaBoiler Dry To Wet ModeMukesh KumarAún no hay calificaciones
- D521 Single Channel Speed Monitor Manual Rev07Documento31 páginasD521 Single Channel Speed Monitor Manual Rev07RAJESH thangavelAún no hay calificaciones
- CMCDocumento32 páginasCMCAnubhav Amu Pandit100% (1)
- 2.final Energy EfficiencyDocumento29 páginas2.final Energy EfficiencyVandana VanuAún no hay calificaciones
- Presentation On Ash Handling SystemDocumento47 páginasPresentation On Ash Handling SystemnagarajsumaAún no hay calificaciones
- Sliding Pressure Operation in Combined CyclesDocumento5 páginasSliding Pressure Operation in Combined CyclesJeeEianYannAún no hay calificaciones
- Pid Oil&gasDocumento26 páginasPid Oil&gasRicardo ZambranaAún no hay calificaciones
- PID Control Tuning MethodsDocumento26 páginasPID Control Tuning MethodsNair67udayAún no hay calificaciones
- Exp - P8 - Multiprocess TrainerDocumento19 páginasExp - P8 - Multiprocess TrainerSiddesh PatilAún no hay calificaciones
- P Control - Tutorial06Documento8 páginasP Control - Tutorial06trung2iAún no hay calificaciones
- Process Control-lecture 08Documento29 páginasProcess Control-lecture 08mwamba chandaAún no hay calificaciones
- PID Control Tuning MethodsDocumento26 páginasPID Control Tuning MethodsNair67udayAún no hay calificaciones
- Presentation On "Free Governor Mode Operation"Documento25 páginasPresentation On "Free Governor Mode Operation"Nair67udayAún no hay calificaciones
- The Tortoise and The HareDocumento29 páginasThe Tortoise and The Harepavitra rajpurohitAún no hay calificaciones
- Solar BasicsDocumento4 páginasSolar BasicsNair67udayAún no hay calificaciones
- Dengue PPT SCHDocumento21 páginasDengue PPT SCHdrsaurabhjprAún no hay calificaciones
- Vibration MonitoringDocumento53 páginasVibration MonitoringNair67udayAún no hay calificaciones
- 10 WordsDocumento11 páginas10 WordsNair67udayAún no hay calificaciones
- DCS Vs PLCDocumento5 páginasDCS Vs PLCNair67udayAún no hay calificaciones
- Module 3: Electropneumatics: Relay Control SystemDocumento36 páginasModule 3: Electropneumatics: Relay Control Systemanon_444174592Aún no hay calificaciones
- Altitude Control of A Quadcopter: June 2015Documento66 páginasAltitude Control of A Quadcopter: June 2015Shreya KowadkarAún no hay calificaciones
- Control Systems Explained: Open vs Closed LoopDocumento4 páginasControl Systems Explained: Open vs Closed LoopMahira FerozAún no hay calificaciones
- Experiment 5 - On-Off ControllerDocumento7 páginasExperiment 5 - On-Off ControllerJitender YadavAún no hay calificaciones
- W Brochure SP64i-USA 0316 USDocumento16 páginasW Brochure SP64i-USA 0316 USIkhsanRizaldiAún no hay calificaciones
- Centro-Matic Automated Lubrication Systems: System ControlsDocumento8 páginasCentro-Matic Automated Lubrication Systems: System ControlsAlex Rivera RiveraAún no hay calificaciones
- Control Loop CharacteristicsDocumento10 páginasControl Loop CharacteristicsJohn Russell MoralesAún no hay calificaciones
- Furnace Atmosphere Control: Eurotherm ControlsDocumento5 páginasFurnace Atmosphere Control: Eurotherm ControlsefasaravananAún no hay calificaciones
- Introduction to Control Systems BasicsDocumento73 páginasIntroduction to Control Systems BasicsJoseph Jeremy100% (1)
- Belimo Smoke ControlDocumento35 páginasBelimo Smoke ControlNenad Mutavdzic100% (1)
- System Manual R360 - 2007 01 - EDocumento251 páginasSystem Manual R360 - 2007 01 - EMuhammad NaveedAún no hay calificaciones
- Chemical and Bio-Process Control: James B. Riggs M. Nazmul KarimDocumento44 páginasChemical and Bio-Process Control: James B. Riggs M. Nazmul KarimRiani ZipAún no hay calificaciones
- 2003 Camry Diagnostic Trouble Code Chart DtcengDocumento8 páginas2003 Camry Diagnostic Trouble Code Chart DtcengMontrealPaulAún no hay calificaciones
- DC Servo Motor Control System User ManualDocumento35 páginasDC Servo Motor Control System User ManualBayeAún no hay calificaciones
- Power Success StoryDocumento21 páginasPower Success StoryhexbiAún no hay calificaciones
- KG - STPCS7 - en 2019Documento596 páginasKG - STPCS7 - en 2019Michel Sánchez ColinAún no hay calificaciones
- The Pump Pros: PumpenDocumento36 páginasThe Pump Pros: PumpenAhmad ShahirAún no hay calificaciones
- S2 HighCapacity TM EN SIE S800 32 4B 6 0 PDFDocumento416 páginasS2 HighCapacity TM EN SIE S800 32 4B 6 0 PDFPop-Coman SimionAún no hay calificaciones
- SRS Example 2Documento17 páginasSRS Example 2Luqman Haqeem NazamAún no hay calificaciones
- Lab Manual - Manufacturing TechnologyDocumento79 páginasLab Manual - Manufacturing Technologyvelumani2003Aún no hay calificaciones
- 85018v2 Manual Vol 2 Rev CDocumento150 páginas85018v2 Manual Vol 2 Rev CyavuzovackAún no hay calificaciones
- Catalog Extract - EduTrainer - enDocumento31 páginasCatalog Extract - EduTrainer - enzhangzhaoleiAún no hay calificaciones
- Water Temperature Control System Design PID Tuning MethodsDocumento3 páginasWater Temperature Control System Design PID Tuning MethodsSingAnnAún no hay calificaciones
- Wärtsilä Pulse Lubricating System To CompleteDocumento23 páginasWärtsilä Pulse Lubricating System To Completekasibhatta100% (9)
- Mini MechDocumento6 páginasMini MechmkkfakesAún no hay calificaciones
- DDC System Commissioning Acceptance ProcedureDocumento23 páginasDDC System Commissioning Acceptance Proceduresacitlalliva100% (1)
- Paper Machine Operation Control and Instrumentation PDFDocumento16 páginasPaper Machine Operation Control and Instrumentation PDFBiantoroKunartoAún no hay calificaciones
- Lightmaster KNX Mmaster 16pp v3Documento9 páginasLightmaster KNX Mmaster 16pp v3Tenchiu AndreeaAún no hay calificaciones
- Resistron: Operating InstructionsDocumento43 páginasResistron: Operating Instructions16_45_2013_gabriAún no hay calificaciones
- Spe 99446Documento8 páginasSpe 99446Nana Silvana AgustiniAún no hay calificaciones