También podría gustarte
- Hotel SicarareDocumento162 páginasHotel Sicarareyisela rodriguezAún no hay calificaciones
- Ecuaciones DiferencialesDocumento38 páginasEcuaciones DiferencialesMarceloMayurìRamirez100% (2)
- Antecedentes Historicos Del Derecho TributarioDocumento5 páginasAntecedentes Historicos Del Derecho TributarioEdgarAún no hay calificaciones
- 3 ClassificationDocumento90 páginas3 ClassificationJaviera Elisa Arancibia CádizAún no hay calificaciones
- Grindex Handbook - 50hz - 9005395 PDFDocumento68 páginasGrindex Handbook - 50hz - 9005395 PDFkike2023Aún no hay calificaciones
- Regresion y Correlacion Lineal MultipleDocumento110 páginasRegresion y Correlacion Lineal MultipleWilliams Ramos SalgueroAún no hay calificaciones
- Ejercicios Resueltos de Series IIDocumento5 páginasEjercicios Resueltos de Series IIFrancisca RojasAún no hay calificaciones
- Repasos 2022 PDFDocumento4 páginasRepasos 2022 PDFAndrea Aldaz RamblaAún no hay calificaciones
- Formulario Regresion LinealDocumento3 páginasFormulario Regresion Linealkevin bustosAún no hay calificaciones
- Diseños Experimentales General Abril 2016Documento161 páginasDiseños Experimentales General Abril 2016Sergio MirelesAún no hay calificaciones
- 2 Normal MultivarianteDocumento30 páginas2 Normal MultivarianteClaudio AballayAún no hay calificaciones
- Tarea EstadisticaDocumento13 páginasTarea EstadisticaJesus Sarmiento LivizacaAún no hay calificaciones
- Apoyo 2Documento5 páginasApoyo 2Damaris Priscila MamaniAún no hay calificaciones
- TP 3Documento4 páginasTP 3LucianaAún no hay calificaciones
- 05-Distrib - Normal MultivariadaDocumento38 páginas05-Distrib - Normal MultivariadaMarlon DeskonAún no hay calificaciones
- Hipotesis Dos PoblacionesDocumento17 páginasHipotesis Dos PoblacioneslamartinezmAún no hay calificaciones
- Tema MLSDocumento13 páginasTema MLSpatAún no hay calificaciones
- Practica 2 Mat 207Documento6 páginasPractica 2 Mat 207Edzon Yujra100% (1)
- U1 DistribDerivadasNormalDocumento44 páginasU1 DistribDerivadasNormalcactrielAún no hay calificaciones
- Puntos fijos multivariableDocumento7 páginasPuntos fijos multivariablejuan lixisAún no hay calificaciones
- s4 02 Limites Coordenadas Polares-Amb3-1Documento12 páginass4 02 Limites Coordenadas Polares-Amb3-1SOTO PALACIOS KEVIN MARLONAún no hay calificaciones
- 12° Semana Analisis MultivarianteDocumento48 páginas12° Semana Analisis MultivarianteDante Palacios ValdiviezoAún no hay calificaciones
- Distribución asintótica y TCL en estadísticaDocumento8 páginasDistribución asintótica y TCL en estadísticaValen MoranAún no hay calificaciones
- VarianzaDocumento4 páginasVarianzaSara DiSuAún no hay calificaciones
- Grupo1 Rpp3 Ami RealDocumento9 páginasGrupo1 Rpp3 Ami RealGeovanny MirandaAún no hay calificaciones
- Clase 2 InterpretacionesDocumento19 páginasClase 2 InterpretacionesRobin Anfossi MatusAún no hay calificaciones
- 3 Normal MultivarianteDocumento27 páginas3 Normal MultivarianteMaria Castro GamarraAún no hay calificaciones
- Analisis de Datos Bivariados Clase Asincronica-559VDocumento5 páginasAnalisis de Datos Bivariados Clase Asincronica-559VNicolas GebauerAún no hay calificaciones
- 2 Normal MultivarianteDocumento30 páginas2 Normal MultivarianteMelissa Fuentes QuispeAún no hay calificaciones
- Estimación varianza poblacionalDocumento1 páginaEstimación varianza poblacionalMish_chanAún no hay calificaciones
- Regresión MúltipleDocumento25 páginasRegresión MúltipleDaryl De Valière-Reyes Y HabsburgoAún no hay calificaciones
- 8.1 Inferencia EstadisticaDocumento5 páginas8.1 Inferencia EstadisticaMarina RodriguezAún no hay calificaciones
- 1.-Teoria - Variable AleatoriaDocumento19 páginas1.-Teoria - Variable AleatoriaJairo Janampa Delgado0% (1)
- HidrologiaDocumento7 páginasHidrologiajuvAún no hay calificaciones
- Presentación ACP y ClusterDocumento35 páginasPresentación ACP y ClusterChristian Gustavo SzelagowiczAún no hay calificaciones
- Clase - Análisis de Regresión Lineal Simple - Estadística I - SociologíaDocumento41 páginasClase - Análisis de Regresión Lineal Simple - Estadística I - SociologíaRenzoAún no hay calificaciones
- S05.s1 - Material PDFDocumento4 páginasS05.s1 - Material PDFRoberto Quispe EscarcenaAún no hay calificaciones
- Formulas de Probabilidad y Estadística UAMDocumento6 páginasFormulas de Probabilidad y Estadística UAMNatalia Pinto EstebanAún no hay calificaciones
- Factores climáticos ecosistemaDocumento19 páginasFactores climáticos ecosistemaJulio Coronado AguirreAún no hay calificaciones
- Estadística Unidad IIIDocumento9 páginasEstadística Unidad IIIHenry MolinaAún no hay calificaciones
- Mat 207 3er Parcial Invierno UmsaDocumento6 páginasMat 207 3er Parcial Invierno UmsaPablok RamosAún no hay calificaciones
- Aplicacion de La Derivada (Recta Tangente y Lhospital)Documento2 páginasAplicacion de La Derivada (Recta Tangente y Lhospital)barbathosAún no hay calificaciones
- TEMA 13 Variables Aleatorias ContinuasDocumento47 páginasTEMA 13 Variables Aleatorias ContinuasCarolita PerezAún no hay calificaciones
- Continuidad Ejercicios ResueltosDocumento6 páginasContinuidad Ejercicios ResueltosFrancisco BianchiAún no hay calificaciones
- Distribucion NormalDocumento28 páginasDistribucion NormalDominic SisayaAún no hay calificaciones
- Formulas de Probabilidad y Estadistica UNNOBADocumento4 páginasFormulas de Probabilidad y Estadistica UNNOBAJuanAún no hay calificaciones
- DiapositivasRegresión (Samuel2012)Documento40 páginasDiapositivasRegresión (Samuel2012)SktSlayerAún no hay calificaciones
- Apoyo Prueba 1 Estadistica Aplicada PDFDocumento52 páginasApoyo Prueba 1 Estadistica Aplicada PDFMaikel RamirezAún no hay calificaciones
- Anda1 PDFDocumento41 páginasAnda1 PDFMario SolanaAún no hay calificaciones
- Formula Chuleta de Formulas EstadisticasDocumento6 páginasFormula Chuleta de Formulas Estadisticasborrar23Aún no hay calificaciones
- Reglas y Ejemplos de DerivadasDocumento4 páginasReglas y Ejemplos de Derivadasjhon alexander ramirez aponteAún no hay calificaciones
- La Ecuación de SchrödingerDocumento34 páginasLa Ecuación de SchrödingerCarolina Martinez StrasserAún no hay calificaciones
- Distribuciones muestrales y teorema del límite centralDocumento28 páginasDistribuciones muestrales y teorema del límite centralJuan sebastian Nieves garciaAún no hay calificaciones
- Especificación Del ModeloDocumento4 páginasEspecificación Del ModeloIago Fole CortegosoAún no hay calificaciones
- Distribuciones especiales en estadísticaDocumento54 páginasDistribuciones especiales en estadísticaNehilot Montañez CastroAún no hay calificaciones
- Distribución lognormal de dos parámetrosDocumento1 páginaDistribución lognormal de dos parámetrosDorian BerthyAún no hay calificaciones
- Taller 5 No Calificable-Prob - FundDocumento4 páginasTaller 5 No Calificable-Prob - FundAndrés RuizAún no hay calificaciones
- Series de PotenciasDocumento22 páginasSeries de PotenciasdiegocuyaAún no hay calificaciones
- Analisis Regresion MultipleDocumento23 páginasAnalisis Regresion MultipleANDRE RENATO VALENTIN FRANCO CORTEZAún no hay calificaciones
- Contenidos Semana 5Documento24 páginasContenidos Semana 5nancyAún no hay calificaciones
- Estudio Del Efecto de Canibalización en Una Tienda de Retail Al...Documento140 páginasEstudio Del Efecto de Canibalización en Una Tienda de Retail Al...Javiera Elisa Arancibia CádizAún no hay calificaciones
- 2Documento40 páginas2Javiera Elisa Arancibia CádizAún no hay calificaciones
- Tarea n5 ExcelDocumento8 páginasTarea n5 ExcelJaviera Elisa Arancibia CádizAún no hay calificaciones
- Colmena Dental CareDocumento1 páginaColmena Dental CareJaviera BetancourtAún no hay calificaciones
- 05 Tarea Set1Documento2 páginas05 Tarea Set1Javiera Elisa Arancibia CádizAún no hay calificaciones
- 05 Tarea Set1Documento1 página05 Tarea Set1Javiera Elisa Arancibia CádizAún no hay calificaciones
- 05 Tarea Set1Documento2 páginas05 Tarea Set1Javiera Elisa Arancibia CádizAún no hay calificaciones
- Estudio Del Efecto de Canibalización en Una Tienda de Retail Al...Documento140 páginasEstudio Del Efecto de Canibalización en Una Tienda de Retail Al...Javiera Elisa Arancibia CádizAún no hay calificaciones
- 05 Tarea Set1Documento1 página05 Tarea Set1Javiera Elisa Arancibia CádizAún no hay calificaciones
- Logos PropuestasDocumento1 páginaLogos PropuestasJaviera Elisa Arancibia CádizAún no hay calificaciones
- ExamenDocumento23 páginasExamenJaime Torres SerranoAún no hay calificaciones
- Examentdah 151109184322 Lva1 App6892Documento3 páginasExamentdah 151109184322 Lva1 App6892Javiera Elisa Arancibia CádizAún no hay calificaciones
- Unidad 3 Matematica 2do Basico PDFDocumento71 páginasUnidad 3 Matematica 2do Basico PDFJaviera Elisa Arancibia CádizAún no hay calificaciones
- Guc3ada Geometrc3ada 30 de NoviembreDocumento8 páginasGuc3ada Geometrc3ada 30 de NoviembreJaviera Elisa Arancibia CádizAún no hay calificaciones
- Tareas de Ingles DomingoDocumento3 páginasTareas de Ingles DomingoJaviera Elisa Arancibia CádizAún no hay calificaciones
- Dobles y TriplesDocumento3 páginasDobles y TriplesJaviera Elisa Arancibia CádizAún no hay calificaciones
- Guiahistoria1 130108184848 Phpapp02 PDFDocumento174 páginasGuiahistoria1 130108184848 Phpapp02 PDFJaviera Elisa Arancibia CádizAún no hay calificaciones
- Prueba de Ciencias Naturales Nombre Alumno: Curso: FechaDocumento2 páginasPrueba de Ciencias Naturales Nombre Alumno: Curso: FechaCarolina Andrea Aceiton NuñezAún no hay calificaciones
- Unidad 2 Clase 2 Actividad A RealizarDocumento1 páginaUnidad 2 Clase 2 Actividad A RealizarJaviera Elisa Arancibia CádizAún no hay calificaciones
- 2 EvaluacionDocumento29 páginas2 EvaluacionJaviera Elisa Arancibia CádizAún no hay calificaciones
- Vida Saludable KinderDocumento6 páginasVida Saludable KinderJaviera Elisa Arancibia CádizAún no hay calificaciones
- Clasificaciones de Los AnimalesDocumento3 páginasClasificaciones de Los AnimalesJaviera Elisa Arancibia CádizAún no hay calificaciones
- Que Es RemacheDocumento10 páginasQue Es RemacheDavid QuispeAún no hay calificaciones
- Template para El Curso de Fundamentos de Marketing - Semana 5 Los Consumidores FinalDocumento37 páginasTemplate para El Curso de Fundamentos de Marketing - Semana 5 Los Consumidores FinalVALERY NADIR ESPINOZA HUISAAún no hay calificaciones
- Lab 3 Uso Del FritzingDocumento13 páginasLab 3 Uso Del FritzingTamara BonepartAún no hay calificaciones
- Guía Miércoles de CenizaDocumento2 páginasGuía Miércoles de CenizaCLAUDIA MILENA SUAREZ DEVIAAún no hay calificaciones
- Orden de Operación 063 Carnavales Ecosocialista 2024-2Documento9 páginasOrden de Operación 063 Carnavales Ecosocialista 2024-2Jannelys CorderoAún no hay calificaciones
- Paper Economia DescriptivaDocumento266 páginasPaper Economia DescriptivaCamilo Duarte ForeroAún no hay calificaciones
- Acta de Reunion de Apertura Del Año 2022Documento3 páginasActa de Reunion de Apertura Del Año 2022Jesus Castillo TrujilloAún no hay calificaciones
- 4.Ppt Téc. de ElocuciónDocumento12 páginas4.Ppt Téc. de ElocuciónAfner Malca HerreraAún no hay calificaciones
- Mr. JonesDocumento10 páginasMr. JonesRoberto AguirreAún no hay calificaciones
- Bailes Tipicos de ColombiaDocumento6 páginasBailes Tipicos de ColombiaFranquyAún no hay calificaciones
- Polietileno Alta DensidadDocumento2 páginasPolietileno Alta DensidadLuis Barreiro LudeñaAún no hay calificaciones
- Wolsvagen PDFDocumento10 páginasWolsvagen PDFAlexVelascoAún no hay calificaciones
- Patrones de asentamiento Salinar en Cerro SalturDocumento45 páginasPatrones de asentamiento Salinar en Cerro SalturKelita Perez CubasAún no hay calificaciones
- Partidas de Nacimiento Jose Alexander Barco HernandezDocumento2 páginasPartidas de Nacimiento Jose Alexander Barco HernandezAmmy QuinterosAún no hay calificaciones
- Adhesion en OdontologiaDocumento5 páginasAdhesion en OdontologiaCristian PazAún no hay calificaciones
- Vender más con TwitterDocumento2 páginasVender más con Twitterjuan0% (1)
- 12.diapositivas Coinesed Juan Carlos de La LleraDocumento79 páginas12.diapositivas Coinesed Juan Carlos de La LleraAjedrecista Bobby FischerAún no hay calificaciones
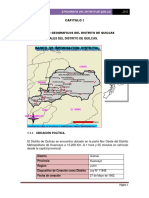
- DX QuilcasDocumento26 páginasDX QuilcasnicenoconstantinopolAún no hay calificaciones
- Investigacion Operativa IIDocumento28 páginasInvestigacion Operativa IImariajose1326100% (1)
- Semana 6 - Auditoría de MantenimientoDocumento26 páginasSemana 6 - Auditoría de Mantenimientojuan carlos bautista vallejoAún no hay calificaciones
- AcústicaDocumento99 páginasAcústicaGermy02Aún no hay calificaciones
- Brochure SquareDentDocumento2 páginasBrochure SquareDentcolombiawebsAún no hay calificaciones
- Resolucion TP2Documento14 páginasResolucion TP2Anahi ZelayaAún no hay calificaciones
- Procedimiento de carga y traslado de tuberíasDocumento18 páginasProcedimiento de carga y traslado de tuberíasRodrigo Enrico San MartinAún no hay calificaciones
- Axiomas de SeparaciónDocumento3 páginasAxiomas de SeparaciónLeonardo Caro50% (2)
- Energías renovables para la agricultura familiarDocumento200 páginasEnergías renovables para la agricultura familiarDanielAún no hay calificaciones
- Recursos Naturales de PanamaDocumento15 páginasRecursos Naturales de PanamaCRISTINA79% (14)