También podría gustarte
- Encuesta Del InecDocumento7 páginasEncuesta Del Inecnicole monserrateAún no hay calificaciones
- Solucion de Evaluacion Final DroxboxDocumento42 páginasSolucion de Evaluacion Final DroxboxRonald Diaz BermeoAún no hay calificaciones
- Reentrada A Pozos Cerrados y Abandonados 1 2Documento36 páginasReentrada A Pozos Cerrados y Abandonados 1 2FelipeMendoza100% (1)
- Estudio de caso sobre el desarrollo del segundo bloque de la mina Northparkes E26Documento9 páginasEstudio de caso sobre el desarrollo del segundo bloque de la mina Northparkes E26Eduardo MenaAún no hay calificaciones
- Reglamento Minisumo RC Junior 2020Documento10 páginasReglamento Minisumo RC Junior 2020GUSTAVO ADOLFO FLOREZ PEÑALOZAAún no hay calificaciones
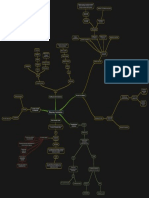
- Mapa Mental Fernando Jimenez Avendaño 156Z0904 A.21 Segmentación de Dominio de Colisión y BroadcastDocumento2 páginasMapa Mental Fernando Jimenez Avendaño 156Z0904 A.21 Segmentación de Dominio de Colisión y BroadcastFernando Amaru ShakurAún no hay calificaciones
- Bases de DatosDocumento32 páginasBases de DatosSchumacher PerezAún no hay calificaciones
- Taller 1. CONCEPTOS BASICOS INVESTIGACIÓN DE MERCADOS Semana 1, Taller 1Documento5 páginasTaller 1. CONCEPTOS BASICOS INVESTIGACIÓN DE MERCADOS Semana 1, Taller 1Brahiam Andres HERNANDEZ LOZANOAún no hay calificaciones
- DELSUR Banco Universal Historia MásDocumento2 páginasDELSUR Banco Universal Historia MásAndres UrdanetaAún no hay calificaciones
- CV NuevoDocumento1 páginaCV NuevoHenry BrownAún no hay calificaciones
- Ejercicios escalas temperaturaDocumento6 páginasEjercicios escalas temperaturawillygansAún no hay calificaciones
- Plantilla para Hallar El Punto de EquilibrioDocumento8 páginasPlantilla para Hallar El Punto de EquilibrioAlejandro CondoriAún no hay calificaciones
- Puma AbarroteriaDocumento116 páginasPuma Abarroteriakeila mejiaAún no hay calificaciones
- Analisis Oferta CompraventaDocumento2 páginasAnalisis Oferta Compraventagloriae mogolloncAún no hay calificaciones
- Haccpii Propuesta Aib PDFDocumento5 páginasHaccpii Propuesta Aib PDFJuan MezaAún no hay calificaciones
- PROCEDIMIENTO SELECTIVOS PARA INGRESO A LOS CUERPOS DE PROFESORES EDUCACION SECUNDARIA Especialidad: INFORMÁTICADocumento6 páginasPROCEDIMIENTO SELECTIVOS PARA INGRESO A LOS CUERPOS DE PROFESORES EDUCACION SECUNDARIA Especialidad: INFORMÁTICAEster GF0% (1)
- La Reconstrucción NacionalDocumento2 páginasLa Reconstrucción NacionalJoseph Diaz DlegadoAún no hay calificaciones
- Manual Transferencia de Tecnologia SostenibleDocumento61 páginasManual Transferencia de Tecnologia Sosteniblecova5609100% (3)
- Sem 10 Práctica Calificada Evaluación Proyectos 2022 IIDocumento2 páginasSem 10 Práctica Calificada Evaluación Proyectos 2022 IIDELMIZA ESTEFANY ESQUIVEL INGAAún no hay calificaciones
- ACTIVIDAD de APRENDIZAJE 1 Cadena de AbastecimientoDocumento6 páginasACTIVIDAD de APRENDIZAJE 1 Cadena de AbastecimientoKelly VegaAún no hay calificaciones
- Tabla (Tiendas Departamentales)Documento48 páginasTabla (Tiendas Departamentales)García Hernández Diana 4O2Aún no hay calificaciones
- Trabajo Final Estadistica InferencialDocumento26 páginasTrabajo Final Estadistica InferencialJaki SucaAún no hay calificaciones
- No Compres ImitacionDocumento28 páginasNo Compres ImitacionErick musicAún no hay calificaciones
- Declaración Andina del Valor: Instrucciones de diligenciamientoDocumento87 páginasDeclaración Andina del Valor: Instrucciones de diligenciamientoAndrés RMAún no hay calificaciones
- Naturaleza de Las Cuentas ContablesDocumento2 páginasNaturaleza de Las Cuentas Contablesev33liita88% (8)
- Máquinas y HerramientasDocumento1 páginaMáquinas y HerramientasRoberto ForteAún no hay calificaciones
- Ejercicios Resueltos - OptimizacionDocumento111 páginasEjercicios Resueltos - OptimizacionClaudio López Inostroza100% (1)
- Conformado de Chapas MetalicasDocumento42 páginasConformado de Chapas MetalicasGERLIAún no hay calificaciones
- Mecanismos participación ciudadana ColombiaDocumento10 páginasMecanismos participación ciudadana ColombiaHarley FernandezAún no hay calificaciones
- Estrategia Metodológica de Intervención en PandemiaDocumento2 páginasEstrategia Metodológica de Intervención en PandemiaPAHOLA CALLE BLANCOAún no hay calificaciones