También podría gustarte
- Unidad IV - Modelos LinealesDocumento14 páginasUnidad IV - Modelos LinealesDayana GiraldoAún no hay calificaciones
- Observadores de Orden ReducidoDocumento24 páginasObservadores de Orden ReducidoHernan AvilaAún no hay calificaciones
- Autovalores y Autovectores PDFDocumento37 páginasAutovalores y Autovectores PDFRoda RodaAún no hay calificaciones
- CM 2 V1 1842579 2Documento6 páginasCM 2 V1 1842579 2Serna ReynaAún no hay calificaciones
- Separatas Ingenieria de Control 4Documento32 páginasSeparatas Ingenieria de Control 4rullitoAún no hay calificaciones
- Unidad II Módullo5 Lección5.1Documento17 páginasUnidad II Módullo5 Lección5.1Karen ArangoAún no hay calificaciones
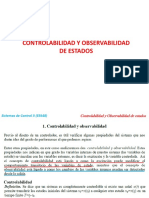
- Clase de Observabilidad y Controlabilidad - Ee648Documento26 páginasClase de Observabilidad y Controlabilidad - Ee648Ronald Alejandro Chaupin BautistaAún no hay calificaciones
- Tema 3 Sistemas Lineales - Matemáticas IIDocumento8 páginasTema 3 Sistemas Lineales - Matemáticas IIGinesAún no hay calificaciones
- DM Ejerc 2Documento43 páginasDM Ejerc 2ANGEL FERNANDO RUIZ ALARCONAún no hay calificaciones
- Sistema Péndulo CarretillaDocumento17 páginasSistema Péndulo CarretillaJosé MartínezAún no hay calificaciones
- Análisis de Una Función Racional Con ParámetrosDocumento11 páginasAnálisis de Una Función Racional Con ParámetrosRocio de SantiagoAún no hay calificaciones
- Sistemas Diferenciales Lineales: Resolución mediante DiagonalizaciónDocumento17 páginasSistemas Diferenciales Lineales: Resolución mediante Diagonalizacióndaniela ordoñezAún no hay calificaciones
- S6 SistemasDeEcuacionesDiferencialesLinealesDocumento62 páginasS6 SistemasDeEcuacionesDiferencialesLinealesfrank alexAún no hay calificaciones
- MT227 Unidad 3b Sistemas de Seguimiento - Diseño de Observadores de Estado 2021-2Documento48 páginasMT227 Unidad 3b Sistemas de Seguimiento - Diseño de Observadores de Estado 2021-2Leugim Escalante LLanosAún no hay calificaciones
- Problema 4Documento9 páginasProblema 4LaTana LOLAún no hay calificaciones
- Semana XDocumento5 páginasSemana XangelAún no hay calificaciones
- Un Sistema Dinámico BásicoDocumento44 páginasUn Sistema Dinámico Básicodareck hinostroza roncerosAún no hay calificaciones
- PROYECTO FINAL de Sistemas de Control IIDocumento13 páginasPROYECTO FINAL de Sistemas de Control IIJairo Josué SierraAún no hay calificaciones
- Equipo 2 - Tarea 1Documento18 páginasEquipo 2 - Tarea 1Jesus Josué González GutiérrezAún no hay calificaciones
- Tema 5Documento32 páginasTema 5javgar6702Aún no hay calificaciones
- Análisis de la convergencia de un sistema dinámico hacia un estado estacionarioDocumento4 páginasAnálisis de la convergencia de un sistema dinámico hacia un estado estacionarioDennis EscobarAún no hay calificaciones
- MT227B Unidad 3b Diseño de Observadores de Estado 2022-1bDocumento66 páginasMT227B Unidad 3b Diseño de Observadores de Estado 2022-1bGabriel JGAún no hay calificaciones
- Diseño de controlador de levitación magnética mediante realimentación de estadoDocumento15 páginasDiseño de controlador de levitación magnética mediante realimentación de estadoMarlonAún no hay calificaciones
- Analisis No Lineal de Un Péndulo InvertidoDocumento13 páginasAnalisis No Lineal de Un Péndulo InvertidoAxlDriel50% (2)
- Laboratorio N°5Documento14 páginasLaboratorio N°5juan julcaAún no hay calificaciones
- Estimación de Parámetros Por El Método MCODocumento3 páginasEstimación de Parámetros Por El Método MCOmgusano344Aún no hay calificaciones
- Teoria Calculo VectorialDocumento37 páginasTeoria Calculo VectorialGaston ParraAún no hay calificaciones
- Ejercicios Fluidos 2Documento19 páginasEjercicios Fluidos 2FabianLarrainCustodioAún no hay calificaciones
- Prepa 10Documento3 páginasPrepa 10Adri GuayasaminAún no hay calificaciones
- Ajuste de Curvas 2017Documento30 páginasAjuste de Curvas 2017ALVARADO GATICA JOSÉ CARLOSAún no hay calificaciones
- LienalizacionDocumento39 páginasLienalizacionPieraAún no hay calificaciones
- Magistral 15 Algebra LinealDocumento18 páginasMagistral 15 Algebra LinealJuan Esteban Higuera MorenoAún no hay calificaciones
- Introduccion: Regresion Por Minimos CuadradosDocumento39 páginasIntroduccion: Regresion Por Minimos CuadradosjordiAún no hay calificaciones
- ESTAD II REGRESION Corregida PDFDocumento31 páginasESTAD II REGRESION Corregida PDFDiana EspínAún no hay calificaciones
- Diseño de Sistemas de Control en El EspacioDocumento20 páginasDiseño de Sistemas de Control en El Espacioisismaria campoverde morenoAún no hay calificaciones
- 15.2 Diagonalización OrtogonalDocumento18 páginas15.2 Diagonalización OrtogonalMatias MarceloAún no hay calificaciones
- Análisis de deflexión en vigas usando funciones de discontinuidadDocumento7 páginasAnálisis de deflexión en vigas usando funciones de discontinuidadAlvaro Fernández GómezAún no hay calificaciones
- Definiciones de Distintos Tipos de Sistemas MatematicosDocumento21 páginasDefiniciones de Distintos Tipos de Sistemas MatematicosAugusto LismayesAún no hay calificaciones
- Clase 1 y 2. Espacios Vectoriales SubespaciosDocumento18 páginasClase 1 y 2. Espacios Vectoriales SubespaciosJesus MachtaAún no hay calificaciones
- Regresión lineal e interpolaciónDocumento15 páginasRegresión lineal e interpolaciónDeleddaAún no hay calificaciones
- Algebra de T.L.Documento33 páginasAlgebra de T.L.Quirod JavierAún no hay calificaciones
- Regresión múltiple: principales característicasDocumento7 páginasRegresión múltiple: principales característicasWILSON ANDRES ERAZO CUASAPAZAún no hay calificaciones
- Práctica 04 Desarrollad 2020-1Documento5 páginasPráctica 04 Desarrollad 2020-1frank anthonyAún no hay calificaciones
- Bidimenvional EjerciciosDocumento22 páginasBidimenvional EjerciciosfranciscoAún no hay calificaciones
- 4p PDFDocumento2 páginas4p PDFJesus HilarioAún no hay calificaciones
- Solución de La Segunda Evaluación de Algebra Lineal-I Término 2018 PDFDocumento8 páginasSolución de La Segunda Evaluación de Algebra Lineal-I Término 2018 PDFandresAún no hay calificaciones
- Resumen de EconometríaDocumento5 páginasResumen de EconometríaEconomía DigitalAún no hay calificaciones
- 6 - Regresión y CorrelaciónDocumento6 páginas6 - Regresión y CorrelaciónMilagros FornesAún no hay calificaciones
- Clase 9 - Descripción en Variables de EstadoDocumento20 páginasClase 9 - Descripción en Variables de EstadoFrancisco HerreraAún no hay calificaciones
- 103 MPE - Teorema Fundamental de Las Transformaciones Lineales - NC PRELIMINAR (2020-08)Documento6 páginas103 MPE - Teorema Fundamental de Las Transformaciones Lineales - NC PRELIMINAR (2020-08)Tiago KapobelAún no hay calificaciones
- SECUECIONES LINEALES SISTEMAS MATRICESDocumento18 páginasSECUECIONES LINEALES SISTEMAS MATRICESEnrique Fernandini MatosAún no hay calificaciones
- 3 DivergenciaDocumento21 páginas3 DivergenciaJonathan CarrilloAún no hay calificaciones
- Proyecto Final Jose OlanDocumento12 páginasProyecto Final Jose OlanJose OlanAún no hay calificaciones
- Métodos de ProyecciónDocumento19 páginasMétodos de Proyecciónanon_692491949Aún no hay calificaciones
- Presentación U3Documento17 páginasPresentación U3Gustavo TellezAún no hay calificaciones
- Ejercicios de potencia, series de Taylor y FourierDe EverandEjercicios de potencia, series de Taylor y FourierAún no hay calificaciones
- Ejercicios de TiristoresDocumento4 páginasEjercicios de Tiristoresmario070167% (3)
- Inversor e MaphamDocumento4 páginasInversor e MaphamWilbert Amanca Cordova100% (1)
- Preg 6 7 MaquinasDocumento2 páginasPreg 6 7 MaquinasomarfranzAún no hay calificaciones
- EE524 - Ejercicios Sobre G.ODocumento14 páginasEE524 - Ejercicios Sobre G.OomarfranzAún no hay calificaciones
- Formulario Prueba Hipotesis.Documento1 páginaFormulario Prueba Hipotesis.Sergio Arturo Cherres BrunoAún no hay calificaciones
- IMAGENES - FTV Vista AlegreDocumento4 páginasIMAGENES - FTV Vista AlegreomarfranzAún no hay calificaciones
- Cuadro de Altura de ArbolesDocumento1 páginaCuadro de Altura de ArbolesomarfranzAún no hay calificaciones
- Guias Ondas ProtDocumento23 páginasGuias Ondas ProtBenjamín Price BallónAún no hay calificaciones
- Inversor Monofasico en Puente H ElectronicaDocumento29 páginasInversor Monofasico en Puente H ElectronicaEdson Roberto Rubio LopezAún no hay calificaciones
- Toshiba - Como Proteger Un IgbtDocumento2 páginasToshiba - Como Proteger Un Igbtomarfranz100% (1)
- Cuadro de Altura de ArbolesDocumento1 páginaCuadro de Altura de ArbolesomarfranzAún no hay calificaciones
- Semana Formulario 2Documento5 páginasSemana Formulario 2omarfranzAún no hay calificaciones
- Cuadro de Altura de ArbolesDocumento1 páginaCuadro de Altura de ArbolesomarfranzAún no hay calificaciones
- EnlacesDocumento4 páginasEnlacesomarfranzAún no hay calificaciones
- Semana Formulario 2Documento5 páginasSemana Formulario 2omarfranzAún no hay calificaciones
- Inversor Monofasico en Puente H ElectronicaDocumento29 páginasInversor Monofasico en Puente H ElectronicaEdson Roberto Rubio LopezAún no hay calificaciones
- Ejercicios Sobre G.O.Documento14 páginasEjercicios Sobre G.O.omarfranzAún no hay calificaciones
- Semana Formulario 2Documento5 páginasSemana Formulario 2omarfranzAún no hay calificaciones
- MyC-Humedad Problemas Resueltos 140319Documento7 páginasMyC-Humedad Problemas Resueltos 140319hernan faAún no hay calificaciones
- Aisladores 3Documento4 páginasAisladores 3omarfranzAún no hay calificaciones
- Semana Formulario 2Documento5 páginasSemana Formulario 2omarfranzAún no hay calificaciones
- Propuestos de Tele 2Documento3 páginasPropuestos de Tele 2Kun RamirezAún no hay calificaciones
- Aislamiento eléctrico con porcelanaDocumento6 páginasAislamiento eléctrico con porcelanaomarfranzAún no hay calificaciones
- Aislamiento eléctrico con porcelanaDocumento6 páginasAislamiento eléctrico con porcelanaomarfranzAún no hay calificaciones
- Modelos de Ejemplo de Clases y Motor DCDocumento8 páginasModelos de Ejemplo de Clases y Motor DComarfranzAún no hay calificaciones
- Cableado EstructuradoDocumento17 páginasCableado EstructuradoomarfranzAún no hay calificaciones
- Cableado EstructuradoDocumento17 páginasCableado EstructuradoomarfranzAún no hay calificaciones
- T Uce 0010 086 2017Documento172 páginasT Uce 0010 086 2017Laura SuarezAún no hay calificaciones
- Conclusion Descriptiva InicialDocumento7 páginasConclusion Descriptiva InicialGuisoù FusterAún no hay calificaciones
- Agricultura EcológicaDocumento10 páginasAgricultura EcológicaDannyAún no hay calificaciones
- Portafolio Control Solar Persianas y QuiebrasolesDocumento7 páginasPortafolio Control Solar Persianas y QuiebrasolesMarcel Correa ForeroAún no hay calificaciones
- Suavización ExponencialDocumento14 páginasSuavización ExponencialhugoAún no hay calificaciones
- Volcanes y Montañas de GuatemalaDocumento11 páginasVolcanes y Montañas de GuatemalaEmerson EsclanteAún no hay calificaciones
- Anexo 14. Lista de Verificación de Contenidos y ProductosDocumento3 páginasAnexo 14. Lista de Verificación de Contenidos y ProductosMaria Fernanda GarciaAún no hay calificaciones
- Jesus ActualidadDocumento49 páginasJesus ActualidadMinerva ZambranoAún no hay calificaciones
- Curso Radiologia 2Documento6 páginasCurso Radiologia 2jdshakaAún no hay calificaciones
- El RuidoDocumento21 páginasEl Ruidocarlos daniel matamala chiangAún no hay calificaciones
- Matemáticas Taller Avanzado #17Documento4 páginasMatemáticas Taller Avanzado #17Luis NicolaoAún no hay calificaciones
- Tarea Gestion de CalidadDocumento21 páginasTarea Gestion de CalidadAnny Segovia SantanaAún no hay calificaciones
- Mruros MilanDocumento186 páginasMruros MilanErick R. Moya PinedaAún no hay calificaciones
- Plan de Seguridad y Salud JardinDocumento26 páginasPlan de Seguridad y Salud JardinmorillosopankevinAún no hay calificaciones
- Historia de Atencion Primaria en SaludDocumento6 páginasHistoria de Atencion Primaria en SaludYanet AyzanoaAún no hay calificaciones
- Plano 1Documento1 páginaPlano 1Cristina Quispe QuispeAún no hay calificaciones
- Examen Parcial de Control de CalidadDocumento7 páginasExamen Parcial de Control de CalidadEduardo CariapazaAún no hay calificaciones
- Tema 2 Transformaciones GeometricasDocumento23 páginasTema 2 Transformaciones GeometricasAngelilla RequejoAún no hay calificaciones
- E3-Plus Resolución FallaDocumento6 páginasE3-Plus Resolución Falladanielizarra12480Aún no hay calificaciones
- Ihering Cielo Conceptos JuridicosDocumento29 páginasIhering Cielo Conceptos Juridicosl18579Aún no hay calificaciones
- Taller de Contabilidad BásicaDocumento2 páginasTaller de Contabilidad BásicaCarol NietoAún no hay calificaciones
- Producción arroz ColombiaDocumento4 páginasProducción arroz ColombiaCamila Andrea Torres LopezAún no hay calificaciones
- Aprendizaje Basado en ProblemasDocumento1 páginaAprendizaje Basado en ProblemasHenry Fernando ILTWAún no hay calificaciones
- Portico TraslacionalDocumento19 páginasPortico TraslacionalAderlin Baldeon RomeroAún no hay calificaciones
- TAD201 Semana7Documento10 páginasTAD201 Semana7Pablo Andres Robles ContrerasAún no hay calificaciones
- Ensayo Simce 1° Medio (Número Ii)Documento15 páginasEnsayo Simce 1° Medio (Número Ii)Francesca MuñozAún no hay calificaciones
- Modelo Guia de Observacion para Actividad 4 Tini 2023Documento8 páginasModelo Guia de Observacion para Actividad 4 Tini 2023MARIA JOSE LOAIZA QUINTEROAún no hay calificaciones
- Resumen Manual Normas Apa Septima Edición-1-1Documento8 páginasResumen Manual Normas Apa Septima Edición-1-1Yamii PortalAún no hay calificaciones
- A2 - CAlculo Vectorial UVMDocumento22 páginasA2 - CAlculo Vectorial UVMJorge perezAún no hay calificaciones
- Ups CT008875Documento441 páginasUps CT008875William RaicoAún no hay calificaciones