También podría gustarte
- Thomas Calculus 11th (Textbook + Solutions)Documento140 páginasThomas Calculus 11th (Textbook + Solutions)Sendhilkumar Alalasundaram76% (33)
- 2600: The Hacker Quarterly (Volume 7, Number 1, Spring 1990)Documento48 páginas2600: The Hacker Quarterly (Volume 7, Number 1, Spring 1990)Ranko KohimeAún no hay calificaciones
- Perkins 1500Documento2 páginasPerkins 1500Andry HikariAún no hay calificaciones
- Factor Rating Method Unit 4Documento51 páginasFactor Rating Method Unit 4Reshma RaiAún no hay calificaciones
- Unit-1 (Industrial Management) )Documento75 páginasUnit-1 (Industrial Management) )Ankur Agrawal93% (15)
- Renewable and Non-Renewable Energy Resources and Energy ConservationDocumento53 páginasRenewable and Non-Renewable Energy Resources and Energy Conservationwilly irawanAún no hay calificaciones
- Math 125 Final Exam Practice SolutionsDocumento9 páginasMath 125 Final Exam Practice SolutionscarrotraisinAún no hay calificaciones
- Flexible Manufacturing Systems (FMS)Documento24 páginasFlexible Manufacturing Systems (FMS)Padmavathi Putra LokeshAún no hay calificaciones
- Work SamplingDocumento36 páginasWork SamplingAakashMehtaAún no hay calificaciones
- Non Conventional Machining PDFDocumento55 páginasNon Conventional Machining PDFMarthande100% (1)
- Lecture 10 PiezoresistiveDocumento13 páginasLecture 10 Piezoresistives_hassan_167419100% (1)
- Chapter 1 Work StudyDocumento50 páginasChapter 1 Work Studymanoj kumar singhAún no hay calificaciones
- Maintenance Management Case StudyDocumento45 páginasMaintenance Management Case StudyVinot NathanAún no hay calificaciones
- 19089-LZN7080141 - 4uen - Aradiorelee Marconi8rDocumento414 páginas19089-LZN7080141 - 4uen - Aradiorelee Marconi8rdigit_ro2051Aún no hay calificaciones
- Sheet 3 Charting and Diagram Chapter 9Documento12 páginasSheet 3 Charting and Diagram Chapter 9AhmedAhmed100% (2)
- Smed Project ReportDocumento10 páginasSmed Project ReportHimanshu KansalAún no hay calificaciones
- Workstudy and ErgonomicsDocumento24 páginasWorkstudy and ErgonomicsMari MuthuAún no hay calificaciones
- Production Planning & ControlDocumento24 páginasProduction Planning & ControlHari Prasad Reddy Yedula100% (1)
- w3css Tutorial2Documento54 páginasw3css Tutorial2RajuAún no hay calificaciones
- Breakdown Characteristics of Air GapsDocumento9 páginasBreakdown Characteristics of Air GapsChamath KirindeAún no hay calificaciones
- 1985 D11 Hitachi Power MOSFET Data BookDocumento362 páginas1985 D11 Hitachi Power MOSFET Data BookTodorosss Jj100% (1)
- Production Planning and ControlDocumento36 páginasProduction Planning and ControlPadmavathi Putra LokeshAún no hay calificaciones
- Flexible Manufacturing Systems (FMS)Documento30 páginasFlexible Manufacturing Systems (FMS)waqasalitunio100% (2)
- Numerical ControlDocumento52 páginasNumerical ControlmishariAún no hay calificaciones
- 13 Product Development EconomicsDocumento23 páginas13 Product Development EconomicsIndranil Bhattacharyya100% (2)
- Designing Efficient Man-Machine SystemsDocumento33 páginasDesigning Efficient Man-Machine SystemsRaghav Rao100% (1)
- Industrial Robotics Production RatesDocumento2 páginasIndustrial Robotics Production RatesMohd SapeqAún no hay calificaciones
- Chapter: - 1: Manually and Power Operated Makka Cutter MachineDocumento88 páginasChapter: - 1: Manually and Power Operated Makka Cutter MachinenagrajAún no hay calificaciones
- Computer Aided Design - Lecture Notes, Study Material and Important Questions, AnswersDocumento6 páginasComputer Aided Design - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVAún no hay calificaciones
- Productivity work study techniques constructionDocumento18 páginasProductivity work study techniques constructionandrewgeorgecherianAún no hay calificaciones
- The Rank Order Clustering (ROC)Documento8 páginasThe Rank Order Clustering (ROC)vangtrangbac_vt50% (2)
- Linear Programming Graphical MethodDocumento7 páginasLinear Programming Graphical MethodDevkaran LodhiAún no hay calificaciones
- Economics of Metal CuttingDocumento10 páginasEconomics of Metal Cuttinghaile mehariAún no hay calificaciones
- CHAPTER - 3 (A) : ASSEMBLY Systems & LINE BalancingDocumento48 páginasCHAPTER - 3 (A) : ASSEMBLY Systems & LINE BalancingshivaAún no hay calificaciones
- Ppce Unit-1Documento118 páginasPpce Unit-1Jackson ..Aún no hay calificaciones
- Lecture Note On Introduction To Industrial EngineeringDocumento105 páginasLecture Note On Introduction To Industrial EngineeringPeter Iyere50% (2)
- Chapter 3 - MATERIAL HANDLING PDFDocumento10 páginasChapter 3 - MATERIAL HANDLING PDFShiverrania 29080% (1)
- Concept of Industrial ManagementDocumento11 páginasConcept of Industrial ManagementKanika Garg100% (2)
- HRM KtuDocumento5 páginasHRM KtuPriyanka George100% (1)
- DJF Unit 1pptDocumento71 páginasDJF Unit 1pptmansoorAún no hay calificaciones
- A Report On Taguchi Methods (Techniques)Documento35 páginasA Report On Taguchi Methods (Techniques)Kaustubh Babrekar100% (1)
- Numerical Control PDFDocumento23 páginasNumerical Control PDFmishari67% (3)
- Linear Programming ProblemDocumento14 páginasLinear Programming ProblemAnoop Nimkande50% (2)
- Tools of TerotechnologyDocumento7 páginasTools of TerotechnologyCharles Ondieki100% (3)
- Question-Bank PPC MK 16marksDocumento5 páginasQuestion-Bank PPC MK 16marksKannan MuthusamyAún no hay calificaciones
- Industrial Engineering Is A Branch ofDocumento10 páginasIndustrial Engineering Is A Branch ofashokkumarAún no hay calificaciones
- WORKSTUDY AND ERGONOMICSDocumento8 páginasWORKSTUDY AND ERGONOMICSSirajAyeshaAún no hay calificaciones
- Material HandlingDocumento4 páginasMaterial HandlingVaidehiranaAún no hay calificaciones
- Design For Fluctuating LoadsDocumento35 páginasDesign For Fluctuating LoadsFeroz Ahmed Mazumder100% (4)
- Industrial Management - Slide PDFDocumento107 páginasIndustrial Management - Slide PDFShahed MahmudAún no hay calificaciones
- Work MeasurementDocumento5 páginasWork MeasurementAvinash SagarAún no hay calificaciones
- Industrial Management PDFDocumento2 páginasIndustrial Management PDFSAKSHI0% (1)
- EHU-601 Industrial ManagementDocumento214 páginasEHU-601 Industrial Managementvivek.birla100% (1)
- POM Class Note 07-Facility Layout Line BalancingDocumento55 páginasPOM Class Note 07-Facility Layout Line BalancingSADY MOHAMMEDAún no hay calificaciones
- Methods, Standard & Work DesignDocumento14 páginasMethods, Standard & Work DesignTRISTAN JOY DEDUQUE FURAQUEAún no hay calificaciones
- Scheduling and Control of FmsDocumento22 páginasScheduling and Control of FmsAbhishek ChadagaAún no hay calificaciones
- Manufacturing Systems-Fleximble Manufacturing Application-Case Study of ZimbabweDocumento5 páginasManufacturing Systems-Fleximble Manufacturing Application-Case Study of Zimbabwejosphat muchatutaAún no hay calificaciones
- Assignment 5 - Capacity PlanningDocumento1 páginaAssignment 5 - Capacity Planningamr onsyAún no hay calificaciones
- Powder MetallurgyDocumento24 páginasPowder MetallurgyNitin Gupta100% (1)
- Plant Layout and Material Handling NotesDocumento78 páginasPlant Layout and Material Handling NotesAustin Edwin100% (1)
- Aggregate PlanningDocumento42 páginasAggregate PlanningMadhavan DakshAún no hay calificaciones
- Systems For Production Have Existed Since Ancient TimesDocumento30 páginasSystems For Production Have Existed Since Ancient TimesSurya PratapAún no hay calificaciones
- MECadCAM Industrial Safety Management Question BankDocumento5 páginasMECadCAM Industrial Safety Management Question BankMr.Padmanaban VAún no hay calificaciones
- Industrial Production Engineering Project IdeasDocumento4 páginasIndustrial Production Engineering Project IdeasRahul Shrivas67% (3)
- Industrial Management Unit 1 NotesDocumento33 páginasIndustrial Management Unit 1 Notesvgbharath80% (5)
- Casting Methods - Investment Casting - Die Casting - Shell Mould Casting - Centrifugal CastingDocumento53 páginasCasting Methods - Investment Casting - Die Casting - Shell Mould Casting - Centrifugal CastingJermain PeartAún no hay calificaciones
- Manufacturing Systems & CNC Machines: V. ThulasikanthDocumento182 páginasManufacturing Systems & CNC Machines: V. ThulasikanthSahil DhankharAún no hay calificaciones
- Chapter 4 - Lecture Notes PDFDocumento23 páginasChapter 4 - Lecture Notes PDFHerna Kartika AfandiAún no hay calificaciones
- Reece 32Documento190 páginasReece 32Danh NguyenAún no hay calificaciones
- Temperature Controller - PID PID500: FeaturesDocumento3 páginasTemperature Controller - PID PID500: FeaturesUhule PeterAún no hay calificaciones
- Xilinx Device Drivers ApiDocumento1213 páginasXilinx Device Drivers ApihypernuclideAún no hay calificaciones
- Noise PollutionDocumento4 páginasNoise PollutionMF YousufAún no hay calificaciones
- Micom P341: Interconnection Protection RelayDocumento425 páginasMicom P341: Interconnection Protection RelayhudsonAún no hay calificaciones
- MINIPROJECTHARTLEYOSCILLATORDocumento15 páginasMINIPROJECTHARTLEYOSCILLATORPramod SultaneAún no hay calificaciones
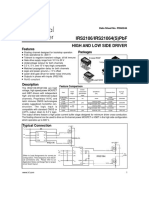
- IRS2106/IRS21064 high and low side driver datasheetDocumento25 páginasIRS2106/IRS21064 high and low side driver datasheetmohamedAún no hay calificaciones
- DX1000Documento2 páginasDX1000Juan OsorioAún no hay calificaciones
- Transfero T EN Low PDFDocumento12 páginasTransfero T EN Low PDFLucas Penalva Costa SerraAún no hay calificaciones
- Thesis Power Amplifier DesignDocumento8 páginasThesis Power Amplifier Designleslylockwoodpasadena100% (2)
- IoTES Lab ManualDocumento9 páginasIoTES Lab ManualdevrepankajAún no hay calificaciones
- GW-US54Mini Manual v1.1 CHTDocumento28 páginasGW-US54Mini Manual v1.1 CHT楊睦源Aún no hay calificaciones
- Canadian-Solar Datasheet Inverter 3ph-12-20KW-ROW EN V1.1 May-2020-5Documento2 páginasCanadian-Solar Datasheet Inverter 3ph-12-20KW-ROW EN V1.1 May-2020-5ENG. ALEXAún no hay calificaciones
- Edc Lab Manual Final PDFDocumento81 páginasEdc Lab Manual Final PDFAchyuth NaiduAún no hay calificaciones
- Cinemate: Universal Remote ControlDocumento19 páginasCinemate: Universal Remote ControlTamara SamanthaAún no hay calificaciones
- 0625 s10 QP 32Documento20 páginas0625 s10 QP 32silAún no hay calificaciones
- PGH FC-FB-S7CP 76Documento264 páginasPGH FC-FB-S7CP 76Ismael GraciaAún no hay calificaciones
- Marine Radar: JMR-5400 SeriesDocumento6 páginasMarine Radar: JMR-5400 SeriesDilip MandoraAún no hay calificaciones
- Swyd NewDocumento39 páginasSwyd NewMrityunjayChauhanAún no hay calificaciones
- Hall Effect ThrottleDocumento9 páginasHall Effect ThrottleryalishivaAún no hay calificaciones
- Novo Documento Do Microsoft Office WordDocumento9 páginasNovo Documento Do Microsoft Office WordVictor José PauloAún no hay calificaciones
- 4aa5 4598eeeDocumento32 páginas4aa5 4598eeeMadaMadutsaAún no hay calificaciones