También podría gustarte
- Artificial Intelligence:: Where Is AI in Computer Science?Documento6 páginasArtificial Intelligence:: Where Is AI in Computer Science?chandrakanthAún no hay calificaciones
- Artificial Intelligence TutorialDocumento68 páginasArtificial Intelligence TutorialAnonymous HQuX2LUsD100% (1)
- Create PDFDocumento12 páginasCreate PDFramanAún no hay calificaciones
- Watertank GS PDFDocumento24 páginasWatertank GS PDFManoj RautAún no hay calificaciones
- 1-Strategic Management OverviewDocumento26 páginas1-Strategic Management OverviewHimanshu SahuAún no hay calificaciones
- Paper: MQTT and Arduino DevicesDocumento14 páginasPaper: MQTT and Arduino DeviceschandrakanthAún no hay calificaciones
- Paper: MQTT and Arduino DevicesDocumento14 páginasPaper: MQTT and Arduino DeviceschandrakanthAún no hay calificaciones
- Design and Drawing of RC Structures: Dr. G.S.SureshDocumento40 páginasDesign and Drawing of RC Structures: Dr. G.S.SureshvipinAún no hay calificaciones
- Control An LED Over The Internet Using The Arduino Ethernet ShieldDocumento6 páginasControl An LED Over The Internet Using The Arduino Ethernet ShieldAlberto Chéquer Novaes NetoAún no hay calificaciones
- Arduino TutorialDocumento229 páginasArduino TutorialRajendra Verma96% (26)
- Arduino TutorialDocumento229 páginasArduino TutorialRajendra Verma96% (26)
- Electrical Engg 2005Documento20 páginasElectrical Engg 2005chandrakanthAún no hay calificaciones
- Solar Notes PDFDocumento178 páginasSolar Notes PDFjaiAún no hay calificaciones
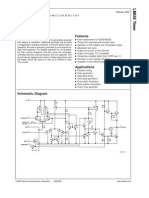
- 555 Timer Guide: Features, Pinouts & ApplicationsDocumento3 páginas555 Timer Guide: Features, Pinouts & ApplicationschandrakanthAún no hay calificaciones
- 1-Strategic Management OverviewDocumento26 páginas1-Strategic Management OverviewHimanshu SahuAún no hay calificaciones
- Electrical MachineDocumento126 páginasElectrical MachineSampath ReddyAún no hay calificaciones
- Labsheet EEL3056Documento15 páginasLabsheet EEL3056FreddyAlexanderTorresAún no hay calificaciones
- 555Documento13 páginas555Anirban ZAún no hay calificaciones
- Transfer Function of Separately Excited DC MotorsDocumento1 páginaTransfer Function of Separately Excited DC MotorschandrakanthAún no hay calificaciones
- LM555Documento12 páginasLM555Amit Kumar Karna100% (18)
- 1.3 Energy Management & AuditDocumento25 páginas1.3 Energy Management & AuditEdd GithaeAún no hay calificaciones
- 555 Timer BasicsDocumento20 páginas555 Timer BasicsgcAún no hay calificaciones
- 1.3 Energy Management & AuditDocumento25 páginas1.3 Energy Management & AuditEdd GithaeAún no hay calificaciones
- Encyclopedia of EnergyDocumento128 páginasEncyclopedia of Energygsamba87Aún no hay calificaciones
- Encyclopedia of EnergyDocumento128 páginasEncyclopedia of Energygsamba87Aún no hay calificaciones
- Boost ConverterDocumento1 páginaBoost ConverterchandrakanthAún no hay calificaciones
- 1-Strategic Management OverviewDocumento26 páginas1-Strategic Management OverviewHimanshu SahuAún no hay calificaciones
- Arduino TutorialDocumento229 páginasArduino TutorialRajendra Verma96% (26)
- Boost ConverterDocumento1 páginaBoost ConverterchandrakanthAún no hay calificaciones
- Pss Lab Manual NewDocumento128 páginasPss Lab Manual NewchandrakanthAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Danica StramaDocumento5 páginasDanica StramaDanica GabuatAún no hay calificaciones
- 2015 ET Solutions AG Business Introduction PresentationDocumento26 páginas2015 ET Solutions AG Business Introduction Presentationmidas33Aún no hay calificaciones
- TrafoDocumento1 páginaTrafoSoumya BhowmickAún no hay calificaciones
- Module2 Automatic Generation ControlDocumento29 páginasModule2 Automatic Generation ControlADDIS JOHNAún no hay calificaciones
- DS LEADER-Volt Catalog USAR ZCL08.264.US .4Documento2 páginasDS LEADER-Volt Catalog USAR ZCL08.264.US .4Zouhir kéniAún no hay calificaciones
- Phelps Dodge PH - 2021 Product BrochureDocumento48 páginasPhelps Dodge PH - 2021 Product BrochureNoel Fajardo Domingo100% (1)
- MDS-B-SPJ2 Series PDFDocumento182 páginasMDS-B-SPJ2 Series PDFFernando SabogalAún no hay calificaciones
- The Induction Motor: An Efficient and Robust ChoiceDocumento18 páginasThe Induction Motor: An Efficient and Robust ChoiceMohd Izzat Abd GhaniAún no hay calificaciones
- Environmental Characteristics of HVDC Overhead TransmissionDocumento10 páginasEnvironmental Characteristics of HVDC Overhead TransmissionPrazetyo Adi NugrohoAún no hay calificaciones
- Unsymmetrical Fault AnalysisDocumento49 páginasUnsymmetrical Fault AnalysisabdulbabulAún no hay calificaciones
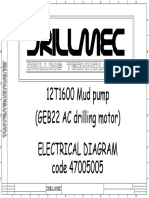
- Mud Pump 12T1600 (47005005)Documento8 páginasMud Pump 12T1600 (47005005)Ali AliAún no hay calificaciones
- ! - 1979 - Drouet, M., & Nadeau, F. - Pressure Waves Due To Arcing Faults in A SubstationDocumento4 páginas! - 1979 - Drouet, M., & Nadeau, F. - Pressure Waves Due To Arcing Faults in A SubstationMikeAún no hay calificaciones
- MV Drives in Marine DatasheetDocumento4 páginasMV Drives in Marine Datasheetlujohn28Aún no hay calificaciones
- Performance Formulas For Power PlantDocumento1 páginaPerformance Formulas For Power Plantmirza_anis100% (1)
- BLDC Motor Open Loop ControlDocumento20 páginasBLDC Motor Open Loop ControlShiva SuryaAún no hay calificaciones
- B2314en HPL Ed4 PDFDocumento6 páginasB2314en HPL Ed4 PDFrimce77Aún no hay calificaciones
- SSRN Id3900351Documento6 páginasSSRN Id3900351nyala chisolaAún no hay calificaciones
- 31 Non Directional Over Current RelaysDocumento3 páginas31 Non Directional Over Current RelaysSrikrishna JanaAún no hay calificaciones
- Online 6kVA: 94% Eficacia Factor de Potencia de 0.9 (4.5kW deDocumento2 páginasOnline 6kVA: 94% Eficacia Factor de Potencia de 0.9 (4.5kW deVictor BlancoAún no hay calificaciones
- Armature Reaction in Direct Current Machines: Pereira, Colombia Julianesteban - Garcia@utp - Edu.coDocumento3 páginasArmature Reaction in Direct Current Machines: Pereira, Colombia Julianesteban - Garcia@utp - Edu.coJulian GarciaAún no hay calificaciones
- Basic ElectronicsDocumento36 páginasBasic Electronicswhatsapp status clipsAún no hay calificaciones
- RME ReviewerDocumento30 páginasRME ReviewerJosefino LlorcaAún no hay calificaciones
- Electrical Generation and Distribution Systems and Power Quality DisturbancesDocumento318 páginasElectrical Generation and Distribution Systems and Power Quality DisturbancesJosé Adalberto Junior100% (1)
- User Manual: MGC120 Petrol Genset ControllerDocumento20 páginasUser Manual: MGC120 Petrol Genset ControlleraltieresmirandaAún no hay calificaciones
- White Paper Faulted Phase EarthingDocumento5 páginasWhite Paper Faulted Phase EarthingAhmed EldalyAún no hay calificaciones
- Melpro: Mitsubishi ElectricDocumento56 páginasMelpro: Mitsubishi ElectricRuel De VillaAún no hay calificaciones
- Applications of Electromagnetic InductionDocumento6 páginasApplications of Electromagnetic InductionAdeniji OlusegunAún no hay calificaciones
- 404 Bus 2 CVT 181021030334Documento6 páginas404 Bus 2 CVT 181021030334SARAVANAN AAún no hay calificaciones
- On Electrical Transformer ManufacturingDocumento15 páginasOn Electrical Transformer ManufacturingTanvi Gupta67% (6)
- Kempower Satellite Version 2 Datasheet Rev.3.30 04-2023 enDocumento7 páginasKempower Satellite Version 2 Datasheet Rev.3.30 04-2023 enMert YılmazAún no hay calificaciones