También podría gustarte
- Cross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionDe EverandCross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionAún no hay calificaciones
- U-Net Planning ToolDocumento39 páginasU-Net Planning Toolruqmus100% (2)
- Mobile Terminal Receiver Design: LTE and LTE-AdvancedDe EverandMobile Terminal Receiver Design: LTE and LTE-AdvancedAún no hay calificaciones
- Fundamentals of Network Planning and Optimisation 2G/3G/4G: Evolution to 5GDe EverandFundamentals of Network Planning and Optimisation 2G/3G/4G: Evolution to 5GAún no hay calificaciones
- Radio Network Planning and Optimisation for UMTSDe EverandRadio Network Planning and Optimisation for UMTSJaana LaihoCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Towards 5G: Applications, Requirements and Candidate TechnologiesDe EverandTowards 5G: Applications, Requirements and Candidate TechnologiesRath VannithambyAún no hay calificaciones
- RF Link Budget and DimensioningDocumento86 páginasRF Link Budget and Dimensioningamir_shahzad100% (2)
- 07 FDD LTE Radio Link Budget 75Documento74 páginas07 FDD LTE Radio Link Budget 75Tharindu Wijegoonasekara75% (4)
- RF Planning BasicsDocumento14 páginasRF Planning BasicsRakesh SolankiAún no hay calificaciones
- Indoor Radio Planning: A Practical Guide for 2G, 3G and 4GDe EverandIndoor Radio Planning: A Practical Guide for 2G, 3G and 4GCalificación: 5 de 5 estrellas5/5 (1)
- ATOLL Planning - by DEV - 16MARCH09Documento24 páginasATOLL Planning - by DEV - 16MARCH09deovrat_dubey100% (1)
- Signaling in Telecommunication NetworksDe EverandSignaling in Telecommunication NetworksCalificación: 4 de 5 estrellas4/5 (1)
- Understanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeDe EverandUnderstanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeMaciej NawrockiAún no hay calificaciones
- ATDI Training Manual PDFDocumento61 páginasATDI Training Manual PDFPrasit ChaiprachakulAún no hay calificaciones
- LTE Signaling: Troubleshooting and Performance MeasurementDe EverandLTE Signaling: Troubleshooting and Performance MeasurementAún no hay calificaciones
- 06 01 RA41206EN60GLA0 LTE Link Budget PDFDocumento61 páginas06 01 RA41206EN60GLA0 LTE Link Budget PDFcatur ediarto100% (1)
- LTE Signaling: Troubleshooting and OptimizationDe EverandLTE Signaling: Troubleshooting and OptimizationCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Fundamentals of Cellular Network Planning and Optimisation: 2G/2.5G/3G... Evolution to 4GDe EverandFundamentals of Cellular Network Planning and Optimisation: 2G/2.5G/3G... Evolution to 4GAún no hay calificaciones
- Atoll PlanningDocumento20 páginasAtoll Planningdaiya barus100% (1)
- FTTH fiber to the home A Clear and Concise ReferenceDe EverandFTTH fiber to the home A Clear and Concise ReferenceAún no hay calificaciones
- Spectrum Report ColeagoDocumento49 páginasSpectrum Report Coleagowalia_anujAún no hay calificaciones
- Introduction to Mobile Network Engineering: GSM, 3G-WCDMA, LTE and the Road to 5GDe EverandIntroduction to Mobile Network Engineering: GSM, 3G-WCDMA, LTE and the Road to 5GAún no hay calificaciones
- Planning For Radio Coverage & Capacity 2.0Documento18 páginasPlanning For Radio Coverage & Capacity 2.0Santosh GuptaAún no hay calificaciones
- 5G TDD Synchronisation QADocumento8 páginas5G TDD Synchronisation QASolomon TagesseAún no hay calificaciones
- UmtsDocumento133 páginasUmtsmuhcahitAún no hay calificaciones
- InfoVista Planet 6.1 IoT LPWADocumento36 páginasInfoVista Planet 6.1 IoT LPWAHassan DaudAún no hay calificaciones
- Atoll Test Question (Answer)Documento4 páginasAtoll Test Question (Answer)anilpanikkathAún no hay calificaciones
- Effects, Impact, and Typical Cases of External Interference in WCDMADocumento11 páginasEffects, Impact, and Typical Cases of External Interference in WCDMAAlvaro GuevaraAún no hay calificaciones
- AIRCOM - Cingular Model Tuning Guidance Thursday 2 December 2004Documento45 páginasAIRCOM - Cingular Model Tuning Guidance Thursday 2 December 2004lady_sAún no hay calificaciones
- LTE Theory To Practice-KPI Optimization (A 4G Wireless Technology)Documento20 páginasLTE Theory To Practice-KPI Optimization (A 4G Wireless Technology)amanagarwal16Aún no hay calificaciones
- Orthogonal Frequency Division Multiplexing (OFDM) System SimulationDocumento21 páginasOrthogonal Frequency Division Multiplexing (OFDM) System SimulationNakibur RahmanAún no hay calificaciones
- LTE TRaining CourseDocumento164 páginasLTE TRaining CourseParamasivam SundararajanAún no hay calificaciones
- SIRADEL MMW Propagation 2Documento11 páginasSIRADEL MMW Propagation 2Prabhakar SinghAún no hay calificaciones
- Microwave - Pathloss IV TrainingDocumento3 páginasMicrowave - Pathloss IV TrainingbantunnaAún no hay calificaciones
- Atoll Crosswave Presentation March2011Documento23 páginasAtoll Crosswave Presentation March2011hectorAún no hay calificaciones
- Atoll GSM Training SlidesDocumento128 páginasAtoll GSM Training SlidesClaudio Ramón López MezaAún no hay calificaciones
- LTE Lack of A Dominant CellDocumento1 páginaLTE Lack of A Dominant Celleduardo_pl8256Aún no hay calificaciones
- 2G Basic Checks After Swap PDFDocumento13 páginas2G Basic Checks After Swap PDFEmre YeniaydinAún no hay calificaciones
- LTE Planning and DimensioningDocumento121 páginasLTE Planning and DimensioningReyna RizkyaAún no hay calificaciones
- AtollDocumento4 páginasAtollRhegindAún no hay calificaciones
- Modelo Okumura HataDocumento15 páginasModelo Okumura HataCarlos FonsecaAún no hay calificaciones
- Atoll Microwave 3 2 0 Detailed Overview May 2013 enDocumento46 páginasAtoll Microwave 3 2 0 Detailed Overview May 2013 enprabhat_praveenAún no hay calificaciones
- OFDM-MIMO Implementation in Line of Sight Microwave/millimeter Wave LinkDocumento52 páginasOFDM-MIMO Implementation in Line of Sight Microwave/millimeter Wave LinkBaruch CyzsAún no hay calificaciones
- ASTRIX ProductDocumento2 páginasASTRIX ProductLe ProfessionistAún no hay calificaciones
- GSM Single Site VerificationDocumento26 páginasGSM Single Site VerificationCedrik PendjiAún no hay calificaciones
- Basic Electronic Interview Questions and AnswersDocumento18 páginasBasic Electronic Interview Questions and AnswersPuravRajAún no hay calificaciones
- LTEDocumento27 páginasLTERonald Bruce Paccieri BerzainAún no hay calificaciones
- Actix Traning - Actix BasicsDocumento18 páginasActix Traning - Actix Basicsudaff4ikAún no hay calificaciones
- GSM RF Planning ConceptsDocumento78 páginasGSM RF Planning ConceptsAhmed GamalAún no hay calificaciones
- Business StudiesDocumento15 páginasBusiness Studiestssuru9182Aún no hay calificaciones
- Business Studies SA - 1Documento2 páginasBusiness Studies SA - 1tssuru9182Aún no hay calificaciones
- MCO - 01 AasigmentDocumento3 páginasMCO - 01 Aasigmenttssuru9182Aún no hay calificaciones
- If You Restyou RustDocumento4 páginasIf You Restyou Rusttssuru9182Aún no hay calificaciones
- GtseDocumento96 páginasGtsetssuru9182100% (1)
- Example: ForceDocumento7 páginasExample: Forcetssuru9182Aún no hay calificaciones
- Teacher Covering Letter-ExampleDocumento1 páginaTeacher Covering Letter-Exampletssuru9182Aún no hay calificaciones
- (Turn Over, Please) : © Radioplan GMBH, An Actix Company, 2006Documento2 páginas(Turn Over, Please) : © Radioplan GMBH, An Actix Company, 2006tssuru9182Aún no hay calificaciones
- QbasicDocumento8 páginasQbasictssuru9182Aún no hay calificaciones
- CV Abhilash B Philips 07111981Documento4 páginasCV Abhilash B Philips 07111981tssuru9182Aún no hay calificaciones
- Jim Corbett National ParkDocumento3 páginasJim Corbett National Parktssuru9182Aún no hay calificaciones
- GMB Lyrics: Holy OneDocumento3 páginasGMB Lyrics: Holy OneRiniAún no hay calificaciones
- Compro Sonora Sby 2023Documento9 páginasCompro Sonora Sby 2023Karir LailiAún no hay calificaciones
- How Sweet The NameDocumento1 páginaHow Sweet The NameTimothy PeterAún no hay calificaciones
- Continuity and Differentiability ErrorlessDocumento12 páginasContinuity and Differentiability Errorlessashmitaramoliya123Aún no hay calificaciones
- 1.16 QJ Machine Fault ListDocumento18 páginas1.16 QJ Machine Fault ListFilippos100% (1)
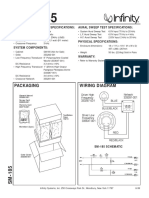
- Infinity sm-185Documento2 páginasInfinity sm-185Bmwmotorsport GabriAún no hay calificaciones
- Mapeh 7 3RD Quarter ExamDocumento6 páginasMapeh 7 3RD Quarter ExamVon Dela RapaAún no hay calificaciones
- Ovt Lime ChartsDocumento25 páginasOvt Lime ChartsMatteo GhittiAún no hay calificaciones
- The First Noel SATB Coro ScoreDocumento10 páginasThe First Noel SATB Coro ScoreJosé Andrés100% (1)
- Measurements: RTTC HyderabadDocumento216 páginasMeasurements: RTTC HyderabadSDENP2CMAP VJAún no hay calificaciones
- Sentence CombiningDocumento2 páginasSentence Combiningapi-279976271Aún no hay calificaciones
- MG ZS HandbookDocumento329 páginasMG ZS HandbookJohn Resureccion Bacuna100% (1)
- Permission 4 - Anti-Sexism EditorialDocumento4 páginasPermission 4 - Anti-Sexism EditorialJayson ElliotAún no hay calificaciones
- The 'Bollywoodization' of The Indian CinemaDocumento14 páginasThe 'Bollywoodization' of The Indian CinemaSajjad JafferyAún no hay calificaciones
- The Art of Solo GuitarDocumento12 páginasThe Art of Solo GuitarOlivier BenarrocheAún no hay calificaciones
- Listening Report On Mozart Violin Concerto No.4Documento1 páginaListening Report On Mozart Violin Concerto No.4Joy Danielle LlandinoAún no hay calificaciones
- CQ Amateur Radio - March 2023Documento116 páginasCQ Amateur Radio - March 2023Francisco QuarantaAún no hay calificaciones
- EncaDocumento22 páginasEncaZjai SimsAún no hay calificaciones
- Sonic Access ManualDocumento45 páginasSonic Access ManualEduardoAún no hay calificaciones
- Hotel California (8 3 20) - Acoustic Guitar (Rhythm)Documento1 páginaHotel California (8 3 20) - Acoustic Guitar (Rhythm)Ross JohnsonAún no hay calificaciones
- Chucho Valdez ThesisDocumento47 páginasChucho Valdez ThesisMaria Angelica Varela La Madrid100% (2)
- Nokia 3g Application Aware Ran WhitepaperDocumento20 páginasNokia 3g Application Aware Ran WhitepaperBless MkhizeAún no hay calificaciones
- Pragati Maidan Exhibition DetailsDocumento10 páginasPragati Maidan Exhibition DetailsDr-Amit KumarAún no hay calificaciones
- AbcdDocumento2 páginasAbcdaditya7gauravAún no hay calificaciones
- Manipur A Jeweled Land (1) - 1Documento43 páginasManipur A Jeweled Land (1) - 1Jatin MoolchandaniAún no hay calificaciones
- One Republic Lyrics - All We AreDocumento1 páginaOne Republic Lyrics - All We AreSrsenarth ShinodaAún no hay calificaciones
- Haydn Sonata 62 E Flat PDFDocumento2 páginasHaydn Sonata 62 E Flat PDFCamron3Aún no hay calificaciones
- IngeteamDocumento2 páginasIngeteamBobot PadilloAún no hay calificaciones
- Final Concept PaperDocumento7 páginasFinal Concept PaperRicardo BalledosAún no hay calificaciones
- Hand Gesture Control Robot PDFDocumento3 páginasHand Gesture Control Robot PDFMd IrfanAún no hay calificaciones