También podría gustarte
- Motor Control Center Details for Umiam Stage-II Hydro ProjectDocumento14 páginasMotor Control Center Details for Umiam Stage-II Hydro ProjectKunik Swaroop0% (1)
- UNIC Brochure English PDFDocumento40 páginasUNIC Brochure English PDFOvirelance -Marius PascariuAún no hay calificaciones
- Huawei E5885ls 93a Mobile Wifi DatasheetDocumento22 páginasHuawei E5885ls 93a Mobile Wifi DatasheetMohammed ShakilAún no hay calificaciones
- Iot Lesson1Documento38 páginasIot Lesson1Matteo Beggiato100% (1)
- Multi-Channel Speech EnhancementDocumento35 páginasMulti-Channel Speech EnhancementAdit Mbeyes Cah GetasAún no hay calificaciones
- Citect V7.0 Error Codes PDFDocumento13 páginasCitect V7.0 Error Codes PDFWahyu PrakosoAún no hay calificaciones
- Concrete Compressive StrengthDocumento4 páginasConcrete Compressive StrengthklynchelleAún no hay calificaciones
- Slide 1-14+ Backpropagation (BP) AlgorithmDocumento8 páginasSlide 1-14+ Backpropagation (BP) AlgorithmMatt MedrosoAún no hay calificaciones
- DSP in Speech ProcessingDocumento11 páginasDSP in Speech ProcessingKetan GargAún no hay calificaciones
- Genetic algorithms and optimization techniquesDocumento10 páginasGenetic algorithms and optimization techniquestsnrao30Aún no hay calificaciones
- LaplaceTransform and System StabilityDocumento30 páginasLaplaceTransform and System Stabilityhamza abdo mohamoudAún no hay calificaciones
- Intelligent Agent: A Variety of DefinitionsDocumento6 páginasIntelligent Agent: A Variety of DefinitionsNaveen KumarAún no hay calificaciones
- EECE 301 Note Set 10 CT ConvolutionDocumento11 páginasEECE 301 Note Set 10 CT ConvolutionrodriguesvascoAún no hay calificaciones
- Speech Enhancement Using Kalman FilterDocumento14 páginasSpeech Enhancement Using Kalman FilterTharunAún no hay calificaciones
- Matlab Ss SolnDocumento7 páginasMatlab Ss Solncheenu15Aún no hay calificaciones
- E-Learning Courses at NFIDocumento7 páginasE-Learning Courses at NFIRvSinghAún no hay calificaciones
- CS464 Intro ML Fall 2010 Decision Tree Q&ADocumento5 páginasCS464 Intro ML Fall 2010 Decision Tree Q&AMRizqiSholahuddinAún no hay calificaciones
- Signals Systems Question PaperDocumento14 páginasSignals Systems Question PaperCoeus Apollo100% (1)
- 5G Glossary of TermsDocumento4 páginas5G Glossary of TermsAvanindra Kumar MishraAún no hay calificaciones
- Deep LearningDocumento5 páginasDeep LearningNisal KarawitaAún no hay calificaciones
- DSP CEN352 Ch2 SamplingDocumento29 páginasDSP CEN352 Ch2 SamplingTewodrosAún no hay calificaciones
- Automatic Speech RecognitionDocumento35 páginasAutomatic Speech RecognitionBhem KumarAún no hay calificaciones
- Loops - Do Until - Do While - Do - Access All in OneDocumento5 páginasLoops - Do Until - Do While - Do - Access All in Onehnoor6Aún no hay calificaciones
- Lecture 1 KaldiDocumento56 páginasLecture 1 KaldiAnh NguyenAún no hay calificaciones
- A Neuro-Fuzzy Approach For Prediction of Human Work Efficiency in Noisy EnvironmentDocumento12 páginasA Neuro-Fuzzy Approach For Prediction of Human Work Efficiency in Noisy EnvironmentvgmanjunathaAún no hay calificaciones
- 01 Basic SignalDocumento13 páginas01 Basic SignalNk KushalAún no hay calificaciones
- Known, What Has Been Done, and What Questions Remain UnansweredDocumento1 páginaKnown, What Has Been Done, and What Questions Remain UnansweredAngelAún no hay calificaciones
- Machine Learning - Part 1Documento80 páginasMachine Learning - Part 1cjon100% (1)
- The Kaldi Speech Recognition Toolkit PDFDocumento4 páginasThe Kaldi Speech Recognition Toolkit PDFngoisaotinhyeu_valleAún no hay calificaciones
- How to Optimize Your Website for Search EnginesDocumento41 páginasHow to Optimize Your Website for Search EnginesTara GonzalesAún no hay calificaciones
- Signal SummaryDocumento11 páginasSignal Summaryaryaman58Aún no hay calificaciones
- Gauss Elimination NotesDocumento7 páginasGauss Elimination Notesnavin shuklaAún no hay calificaciones
- ML: Introduction 1. What Is Machine Learning?Documento38 páginasML: Introduction 1. What Is Machine Learning?rohitAún no hay calificaciones
- Artificial neural networks and their applications to microwave problemsDocumento38 páginasArtificial neural networks and their applications to microwave problemsmaheshkundrapuAún no hay calificaciones
- Lab ManualDocumento88 páginasLab ManualKirubha Shankar EceAún no hay calificaciones
- Back PropagationDocumento33 páginasBack PropagationRoots999Aún no hay calificaciones
- DSPLab2 Sampling TheoremDocumento8 páginasDSPLab2 Sampling TheoremFahad ZakariyaAún no hay calificaciones
- Decision Tree - Associative Rule MiningDocumento69 páginasDecision Tree - Associative Rule MiningNoh NaimAún no hay calificaciones
- Unconstrained and Constrained Optimization Algorithms by Soman K.PDocumento166 páginasUnconstrained and Constrained Optimization Algorithms by Soman K.PprasanthrajsAún no hay calificaciones
- Step by Step Guide How To Rapidly Build Neural NetworksDocumento6 páginasStep by Step Guide How To Rapidly Build Neural NetworksHamza AzizAún no hay calificaciones
- Adaptive Neural Fuzzy Inference System (ANFISDocumento45 páginasAdaptive Neural Fuzzy Inference System (ANFISnipunmasterAún no hay calificaciones
- Affine Projection Adaptive Filter Is A Better Noise CancellerDocumento10 páginasAffine Projection Adaptive Filter Is A Better Noise Cancellerasifamjad77100% (1)
- SC Cat1 Merged PDFDocumento244 páginasSC Cat1 Merged PDFEco Frnd Nikhil ChAún no hay calificaciones
- Digital Over Analog Signal ProcessingDocumento2 páginasDigital Over Analog Signal ProcessingHayeon Lee100% (1)
- Soft Computing and Optimization AlgorithmsDocumento27 páginasSoft Computing and Optimization AlgorithmsAndrew GarfieldAún no hay calificaciones
- Develop The Following Programs in The MATLAB EnvironmentDocumento7 páginasDevelop The Following Programs in The MATLAB EnvironmentRongChơiChiTửAún no hay calificaciones
- Neuro-Fuzzy Computing Model Learning and Inference Through ANFISDocumento10 páginasNeuro-Fuzzy Computing Model Learning and Inference Through ANFISChanaka RupasingheAún no hay calificaciones
- Signals Sampling TheoremDocumento3 páginasSignals Sampling TheoremDebashis TaraiAún no hay calificaciones
- Neural Networks - LearningDocumento26 páginasNeural Networks - Learningoletoro14Aún no hay calificaciones
- Course Notes Advanced DSPDocumento122 páginasCourse Notes Advanced DSPAnonymous hDKqasfAún no hay calificaciones
- Adaptive FiltersDocumento14 páginasAdaptive FiltersSonu VermaAún no hay calificaciones
- Neuro-Fuzzy Lab ManualDocumento1 páginaNeuro-Fuzzy Lab Manualhifzan786Aún no hay calificaciones
- Recognition of Tokens: The Question Is How To Recognize The Tokens?Documento15 páginasRecognition of Tokens: The Question Is How To Recognize The Tokens?Shyam KaranthAún no hay calificaciones
- Control Systems Vs Machine LearningDocumento2 páginasControl Systems Vs Machine LearningSufiyan N-YoAún no hay calificaciones
- Digital Signals and Filters Problem SolutionsDocumento90 páginasDigital Signals and Filters Problem SolutionsHoang Thao PhamAún no hay calificaciones
- Genetic Algorithm Explained: How It Works and TerminologyDocumento9 páginasGenetic Algorithm Explained: How It Works and TerminologyValerioApicellaAún no hay calificaciones
- DSP Using Matlab® - 6Documento23 páginasDSP Using Matlab® - 6api-3721164100% (4)
- Modelling and Analysis of The Simple Water Heater SystemDocumento4 páginasModelling and Analysis of The Simple Water Heater SystemJohandi PatriaAún no hay calificaciones
- Classical and Fuzzy Sets-VtuDocumento96 páginasClassical and Fuzzy Sets-VtuNatarajan Subramanyam100% (1)
- Lecture-3: Microphone Array Processing: Digital Audio Signal ProcessingDocumento13 páginasLecture-3: Microphone Array Processing: Digital Audio Signal ProcessingIjaz FazilAún no hay calificaciones
- EndsemDocumento2 páginasEndsemaman rajAún no hay calificaciones
- Assignment 2Documento2 páginasAssignment 2ue06037Aún no hay calificaciones
- Dynamic Programming 2Documento24 páginasDynamic Programming 2Aakansh ShrivastavaAún no hay calificaciones
- Assignment 1: Spring 2020Documento6 páginasAssignment 1: Spring 2020kant734Aún no hay calificaciones
- 11 - Biennial - Form/3 Component Uphole Survey For Estimation of SHDocumento5 páginas11 - Biennial - Form/3 Component Uphole Survey For Estimation of SHVishal PandeyAún no hay calificaciones
- On Handwritten Digit RecognitionDocumento15 páginasOn Handwritten Digit RecognitionAnkit Upadhyay100% (1)
- 1 11 S Kinetics StudentVersionDocumento14 páginas1 11 S Kinetics StudentVersionMuhammad ilhamAún no hay calificaciones
- Materials and Techniques Used For The "Vienna Moamin": Multianalytical Investigation of A Book About Hunting With Falcons From The Thirteenth CenturyDocumento17 páginasMaterials and Techniques Used For The "Vienna Moamin": Multianalytical Investigation of A Book About Hunting With Falcons From The Thirteenth CenturyAirish FAún no hay calificaciones
- AP+Bio 013+Photosynthesis++Respiration+Worksheet WLDocumento2 páginasAP+Bio 013+Photosynthesis++Respiration+Worksheet WLVincent SuarezAún no hay calificaciones
- Innovative Injection Rate Control With Next Generation Common Rail Fuel Injection SystemDocumento8 páginasInnovative Injection Rate Control With Next Generation Common Rail Fuel Injection SystemRakesh BiswasAún no hay calificaciones
- E 1340 - 96 - RtezndaDocumento12 páginasE 1340 - 96 - RtezndagheijoAún no hay calificaciones
- HMT Data Book-kothandaramanDocumento2 páginasHMT Data Book-kothandaramanNikhil T G0% (1)
- Types of Nuclear Reactors GuideDocumento19 páginasTypes of Nuclear Reactors GuideUgur GuvenAún no hay calificaciones
- CHM 556 Experiment 5Documento12 páginasCHM 556 Experiment 5Amar Safwan100% (1)
- Echotrac Mkiii: Operator'S ManualDocumento48 páginasEchotrac Mkiii: Operator'S ManualKhắc PhongAún no hay calificaciones
- Welcome To Cosc 3101/ Internet Programming: Five Cookies and Session Management in PHPDocumento18 páginasWelcome To Cosc 3101/ Internet Programming: Five Cookies and Session Management in PHPSerkalem NegusseAún no hay calificaciones
- CSC4212 Lecture 3 - 3D Viewing - Projection TransformationDocumento31 páginasCSC4212 Lecture 3 - 3D Viewing - Projection TransformationAhmad AbbaAún no hay calificaciones
- A Tour Through Mathematical Logic: Robert S. WolfDocumento4 páginasA Tour Through Mathematical Logic: Robert S. WolfUrahara JefAún no hay calificaciones
- Cavalieri Principle (Kin Y. Li)Documento4 páginasCavalieri Principle (Kin Y. Li)Hicham ElyassamiAún no hay calificaciones
- Tapered Vector Spiral in InkscapeDocumento5 páginasTapered Vector Spiral in InkscapejeanAún no hay calificaciones
- Introduction To AcousticsDocumento4 páginasIntroduction To AcousticsClarence MamucodAún no hay calificaciones
- UNAVCO 2008 LiDAR Campaign Processing ReportDocumento23 páginasUNAVCO 2008 LiDAR Campaign Processing ReportLina Xiomara SierraAún no hay calificaciones
- UNIT IV: Calculating Probability Using Fundamental ConceptsDocumento15 páginasUNIT IV: Calculating Probability Using Fundamental ConceptsGaurav SonkarAún no hay calificaciones
- Engineering Chemistry Lab Osmania UniversityDocumento83 páginasEngineering Chemistry Lab Osmania UniversityMujtaba khanAún no hay calificaciones
- TG 7FS LTE A Product Data Sheet Final WEB WhiteDocumento2 páginasTG 7FS LTE A Product Data Sheet Final WEB WhiteMedSparkAún no hay calificaciones
- Esolutions Manual - Powered by CogneroDocumento31 páginasEsolutions Manual - Powered by CogneroAll About MusicAún no hay calificaciones
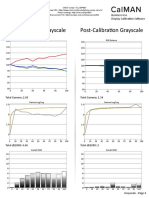
- TCL 55P607 CNET Review Calibration ResultsDocumento3 páginasTCL 55P607 CNET Review Calibration ResultsDavid KatzmaierAún no hay calificaciones
- PAI Industries, Inc. - Catalog Polea de MotorDocumento2 páginasPAI Industries, Inc. - Catalog Polea de MotorAlexis ValleAún no hay calificaciones
- Module 3 - Data and Database ManagementDocumento11 páginasModule 3 - Data and Database ManagementDarrilyn VillalunaAún no hay calificaciones