Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Tesis Presentation in Spanish: Algoritmo Genético para La Planificación de Trayectorias en Robots Industriales
Tesis Presentation in Spanish: Algoritmo Genético para La Planificación de Trayectorias en Robots Industriales
Cargado por
Fares Abu-DakkaTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Tesis Presentation in Spanish: Algoritmo Genético para La Planificación de Trayectorias en Robots Industriales
Tesis Presentation in Spanish: Algoritmo Genético para La Planificación de Trayectorias en Robots Industriales
Cargado por
Fares Abu-DakkaCopyright:
Formatos disponibles
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Presentado por: D. Fares Jawad Abu-Dakka
Dirigida por: Dr. Francisco Valero
Centro de Investigacin de Tecnologa de Vehculos (CITV)
Departamento de Ingeniera Mecnica y de Materiales (DIMM)
Universitat Politcnica de Valncia
TESIS DOCTORAL
DEPARTAMENTO DE INGENIERA MECNICA Y DE MATERIALES
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 2
NDICE
1. Introduccin
2. Modelado del Problema
3. Planificacin de Caminos
4. Planificacin de Trayectorias
5. Conclusiones
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 3
NDICE
1. Introduccin
Motivacin.
Antecedentes.
Aproximacin a Los Algoritmos Genticos.
Objetivos.
2. Modelado del Problema
3. Planificacin de Caminos
4. Planificacin de Trayectorias
5. Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 4
1.- Introduccin
1.1. - Motivacin
El progresivo inters en dotar al sistema robtico la capacidad de planificar sus
propios movimientos.
Todava quedan abiertos ciertos problemas que pueden mejorar en las tcnicas de
planificacin de Caminos y Trayectorias.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 5
Algoritmos para la Planificacin de Caminos
Obtener una secuencia (camino) de configuraciones del robot entre una
configuracin inicial y otra final, que satisfaga algunas condiciones, entre
las que cabe destacar la prevencin de colisiones
Algoritmos para la Planificacin de Trayectorias
Obtener una historia temporal de la evolucin del robot, minimizando el
tiempo requerido o el consumo de energa y con restricciones tanto de
prevencin de colisiones como relacionadas con las limitaciones dinmicas
del robot.
1.- Introduccin
1.2. - Antecedentes
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 6
Planificacin de Caminos
Mtodos Globales: Trabajan sobre el entorno completo.
El mtodo por construccin de mapas Nilsson 1969, bsqueda de caminos en trminos
geomtricos de Lozano-Perez 1983, descomposicin celular de Schwartz y Sharir 1983, etc.
Mtodos Locales: Trabajan sobre entornos reducidos.
El campo potencial artificial de Khatib 1986, Barraquand and Latombe 1989, El mtodo de
restricciones de Faverjon y Tournassoud 1987, mapa de rutas probabilstico de Kavraki 1996,
etc.
Planificacin de Trayectorias
Mtodos Indirectos:
Shin y McKay 1985, Slotine y Yang 1989, Saramago1999, etc.
Mtodos Directos:
Saramago y Steffen 2001, Rubio 2009, etc.
1.- Introduccin
1.2. - Antecedentes
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 7
AG en la Planificacin de Caminos y de la Trayectoria
Khoogar and Parker 1991 trataron el problema de planificacin de caminos en 2D y
con robot de 3 GDL.
Davidor 1991 optimiz la trayectoria en 2D de un robot de 3 GDL.
Zhao 1992 trataron el problema de la planificacin de caminos para un manipulador
de 3 GDL sujeto en base mvil de 2 GDL.
Toogood 1995 utiliz los AG para obtener una trayectoria libre de colisiones para un
robot de 3 GDL.
Tse y Wang 1998 introdujeron un AG para minimizar el tiempo sujeto a un camino
dado para robots industriales con restricciones de velocidad, aceleracin, y jerk.
Vadakkepat 2000 combin los AG con el campo potencial artificial para resolver el
problema de la planificacin de Caminos.
Tian y Collinas 2005 utilizaron los AG en la planificacin de Caminos para analizar
el espacio de trabajo en 2D para un robot de 2 GDL.
1.- Introduccin
1.2. - Antecedentes
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 8
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Algoritmos de bsqueda basados en la mecnica de la evolucin, en particular:
La seleccin natural y La herencia gentica.
Combinan la supervivencia del ms fuerte con intercambio de informacin entre
individuos para generar descendientes.
As se consigue crear sistemas de cmputo artificiales con caractersticas propias de los
sistemas naturales, tales como:
Robustez, Flexibilidad, Auto-organizacin, Reproduccin, ...
Qu Son?
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 9
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Historia
Fueron introducidos por John Holland y algunos colegas en la Universidad de Michigan
en los aos 70. Sus objetivos fueron.
Abstraer y explicar el proceso adaptativo de los sistemas naturales
Disear sistemas artificiales que emulasen los mecanismos esenciales de los sistemas naturales
Primera monografa [Holland 1975]: Adaptation in Natural and Artificial Systems
Otras referencias relevantes ms recientes:
[Goldberg 1989] : Genetic Algoritms in Search Optimization and Machine Learning
[Michalewick 1992, 1994, 1996] : Genetic Algoritms = Data Structures + Evolution Programs
Algoritmos de bsqueda basados en la mecnica de la evolucin, en particular:
La seleccin natural y La herencia gentica.
Combinan la supervivencia del ms fuerte con intercambio de informacin entre
individuos para generar descendientes.
As se consigue crear sistemas de cmputo artificiales con caractersticas propias de los
sistemas naturales, tales como:
Robustez, Flexibilidad, Auto-organizacin, Reproduccin, ...
Qu Son?
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 10
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Han demostrado ser tiles en problemas de bsqueda en muchos campos:
Ingenieras, Ciencias, Administracin, Industria, ...
Son simples, fciles de entender y de disear.
No tienen limitaciones sobre la funcin objetivo:
Por ejemplo no es necesario que sean continuas ni derivables, etc.
Son robustos y razonablemente eficientes.
Aplicaciones y Ventajas
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 11
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Han demostrado ser tiles en problemas de bsqueda en muchos campos:
Ingenieras, Ciencias, Administracin, Industria, ...
Son simples, fciles de entender y de disear.
No tienen limitaciones sobre la funcin objetivo:
Por ejemplo no es necesario que sean continuas ni derivables, etc.
Son robustos y razonablemente eficientes.
Aplicaciones y Ventajas
Caractersticas
Utilizan codificaciones de las soluciones (normalmente cadenas de smbolos).
Buscan a partir de un conjunto de puntos del espacio de bsqueda, no un punto
nico.
Solamente utilizan el valor de la funcin objetivo (en lugar de derivadas u otras
propiedades): No requieren ms informacin del dominio del problema.
Usan reglas de transicin probabilistas en lugar de deterministas.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 12
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Inicio
Iniciar Parmetros:
Pc, Pm,
Poblacin Inicial
La funcin de
Fitness
Operador de
Seleccin
Cruce
Mutacin
Nueva Poblacin
Finaliza?
Poblacin Final
No
Si
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Parmetros: Pc, Pm, popsize, ngen, nmeg,
npop, etc.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 13
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Inicio
Iniciar Parametros:
Pc, Pm,
Poblacin Inicial
La funcin de
Fitness
Operador de
Seleccin
Cruce
Mutacin
Nueva Poblacin
Finaliza?
Poblacin Final
No
Si
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
La funcin de fitness gua el mecanismo de
bsqueda a travs del operador de
seleccin. La influencia de la funcin de
fitness es fundamental para determinar los
individuos candidatos a sobrevivir.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 14
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Inicio
Iniciar Parametros:
Pc, Pm,
Poblacin Inicial
La funcin de
Fitness
Operador de
Seleccin
Cruce
Mutacin
Nueva Poblacin
Finaliza?
Poblacin Final
No
Si
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
La operacin de reproduccin consiste en
seleccionar los individuos utilizando
alguno de los algoritmos de seleccin para
producir.
Tipos de Seleccin:
La ruleta.
Por torneo.
Basada en ranking.
Determinstica. Etc.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 15
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Inicio
Iniciar Parametros:
Pc, Pm,
Poblacin Inicial
La funcin de
Fitness
Operador de
Seleccin
Cruce
Mutacin
Nueva Poblacin
Finaliza?
Poblacin Final
No
Si
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
La idea principal del cruce se basa en que,
si se toman dos individuos correctamente
adaptados al medio y se obtiene una
descendencia que comparta genes de
ambos, existe la posibilidad de que los
genes heredados sean precisamente los
causantes de la bondad de los padres.
Tipos de Cruce:
De un punto.
De dos puntos.
PMX.
Uniforme.
Discretizado. Etc.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 16
1.- Introduccin
1.3. Aproximacin a Los Algoritmos Genticos.
Inicio
Iniciar Parametros:
Pc, Pm,
Poblacin Inicial
La funcin de
Fitness
Operador de
Seleccin
Cruce
Mutacin
Nueva Poblacin
Finaliza?
Poblacin Final
No
Si
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
La mutacin de un individuo provoca que
alguno de sus genes vare su valor de forma
aleatoria.
Una de las ventajas de la mutacin es sacar
el algoritmo de un bloqueo en un mnimo
local.
Tipos de Mutacin:
De un gen.
De multigen.
De un bit.
De multibit.
De intercambio.
De inversin. Etc.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 17
1.- Introduccin
1.4. - Objetivos
Un algoritmo gentico para resolver el problema de planificacin de
caminos.
Un algoritmo gentico para resolver el problema de planificacin de
trayectorias.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 18
NDICE
1. Introduccin
2. Modelado del Problema
3. Planificacin de Caminos
4. Planificacin de Trayectorias
5. Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 19
NDICE
1. Introduccin
2. Modelado del Problema
Modelado del Robot.
Modelo Cinemtico.
Modelo Dinmico.
Modelado del Entorno.
Prevencin de Colisiones.
3. Planificacin de Caminos
4. Planificacin de Trayectorias
5. Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 20
2.- Modelado del Problema
2.1. Modelado del Robot.
Modelo almbrico
La configuracin del robot en
coordenadas de nudos
( )
i
j
q C
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
X
Y
Z
O
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 21
2.- Modelado del Problema
2.1. Modelado del Robot.
Modelo almbrico
La configuracin del robot en
coordenadas de nudos
( )
i
j
q C
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
X
Y
Z
O
4
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 22
2.- Modelado del Problema
2.1. Modelado del Robot.
Modelo almbrico
La configuracin del robot en
coordenadas de nudos
La configuracin del robot en
coordenadas Cartesianas
Puntos significativos
Puntos de inters
( )
i
j
m
q
( )
i
j
k
q
( )
i
j
q C
( )
j
k
j
m
j
C ,
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
X
Y
Z
O
4
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 23
2.- Modelado del Problema
2.2. Modelo Cinemtico.
Para describir la cadena cinemtica de forma precisa y eficaz, se requiere una
convencin. En esta tesis, se utiliza la notacin de la Denavit-Hartenberg Modificada,
presentada por Craig 2005
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 24
2.- Modelado del Problema
2.3. Modelo Dinmico.
Formulacin de Newton-Euler:
Procedimiento recursivo
Hacia fuera calculando velocidades y aceleraciones
lineales y angulares
Hacia dentro calculando pares y esfuerzos en las
articulaciones
Basado en operaciones vectoriales
Ecuaciones poco estructuradas
Complejidad computacional: O(n)
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 25
2.- Modelado del Problema
2.4. Modelado del Entorno.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
El entorno de trabajo en esta tesis se define como el espacio que
contiene al menos un conjunto de configuraciones del robot
obtenidos en base a un conjunto discreto de posiciones del
elemento terminal.
El entorno de trabajo segn Craig 2005: la existencia o
inexistencia de una solucin cinemtica de un manipulador dado.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 26
2.- Modelado del Problema
2.4. Modelado del Entorno.
4
i
4
f
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Se considera un prisma rectangular asociado a las
posiciones del elemento terminal en el espacio,
entre las configuraciones inicial y final del robot.
Las aristas del prisma son paralelas a los ejes del
sistema de referencia cartesiano global.
El entorno de trabajo en esta tesis se define como el espacio que
contiene al menos un conjunto de configuraciones del robot
obtenidos en base a un conjunto discreto de posiciones del
elemento terminal.
El entorno de trabajo segn Craig 2005: la existencia o
inexistencia de una solucin cinemtica de un manipulador dado.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 27
2.- Modelado del Problema
2.4. Modelado del Entorno.
4
i
4
f
|
|
|
.
|
\
|
+ =
= A
|
|
|
.
|
\
|
+ =
= A
|
|
|
.
|
\
|
+ =
= A
D
ceil Pts donde
Pts
D
ceil Pts donde
Pts
D
ceil Pts donde
Pts
i
z
f
z
z
z
i
z
f
z
z
i
y
f
y
y
y
i
y
f
y
y
i
x
f
x
x
x
i
x
f
x
x
4 4
4 4
4 4
4 4
4 4
4 4
1 ;
1
1 ;
1
1 ;
1
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
El conjunto de posiciones que puede ocupar el elemento
terminal viene en funcin del tamao de la discretizacin
que se realice del prisma de trabajo.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 28
2.- Modelado del Problema
2.4. Modelado del Entorno.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 29
2.- Modelado del Problema
2.5. Prevencin de Colisiones.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
X
Y
Z
O
m
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 30
2.- Modelado del Problema
2.5. Prevencin de Colisiones.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
X
Y
Z
O
m
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 32
NDICE
1. Introduccin
2. Modelado del Problema
3. Planificacin de Caminos
4. Planificacin de Trayectorias
5. Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 33
NDICE
1. Introduccin
2. Modelado del Problema
3. Planificacin de Caminos
Configuraciones Adyacentes.
Algoritmo Gentico para la Planificacin de Caminos.
Ejemplos.
4. Planificacin de Trayectorias
5. Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 34
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
Discretizacin del Espacio de Trabajo
A
x
A
y
A
z
4
j
4
j+1
4
j+2
4
j+3
4
j+4
4
j+6
4
j+5
4
i
4
f
X
Y
Z
O
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 35
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
Se dice que las configuraciones C
p
, C
k
son adyacentes si
son factibles y cumple lo siguiente:
La distancia que pasa el elemento terminal para ir de C
p
a C
k
es menor que el tamao de el obstculo ms pequeo.
Las distancias entre los puntos significativos de C
p
y C
k
tienen que ser menor que el tamao del obstculo ms
pequeo.
Minimiza la funcin:
( ) ,... 2 , 1 ; 3 , 2 , 1 ; min 2 = = s j i r
j
k
i
p
i
( )
( )
( )
( )
= =
+
|
|
|
|
|
|
.
|
\
|
+
+
=
6
1
2
4
1
2
2
2
i
k
i
f
i
j
z
p
j
k
j
y
p
j
k
j
x
p
j
k
j
p k
q q B A C C
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 36
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
1- La cinemtica inversa; analticamente.
2- Utilizando un Algoritmo Gentico.
p
k
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 37
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
1- La cinemtica inversa; analticamente.
2- Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Este algoritmo gentico usa poblaciones superpuestos.
Esto significa, la capacidad de especificar qu parte de
la poblacin deben ser reemplazados en cada
generacin. Los nuevos descendientes generados se
aaden a la poblacin y, a continuacin los peores se
eliminan.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 38
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
1- La cinemtica inversa; analticamente.
2- Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
Robot Configuration
Gene 1
q
1
q
2
q
3
q
4
q
5
q
6
Gene 6
gene(i) = RV(q
i,min
, q
i,max
); i = 1 6
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 39
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
1- La cinemtica inversa; analticamente.
2- Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin: La ruleta
Cruce
Mutacin
Funcin Objetivo
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
La seleccin de ruleta conste en asignar probabilidades
de acuerdo al grado de adaptacin de los cromosomas.
La seleccin de ruleta permite que los mejores
individuos sean elegidos con una mayor probabilidad.
Ind. 1
Ind. 2
Ind. 3
Ind. 4
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 40
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
1- La cinemtica inversa; analticamente.
2- Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Cruce de
un Punto
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 41
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
1- La cinemtica inversa; analticamente.
2- Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
gene(i) = gene(i) + RV(q
i,min
, q
i,max
) [RV(q
i,min
, q
i,max
) - RV(q
i,min
, q
i,max
)]
Mutacin
de un Gen
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 42
3.- Planificacin de Caminos
3.1. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
1- La cinemtica inversa; analticamente.
2- Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
( )
( )
( )
( )
= =
+
|
|
|
|
|
|
.
|
\
|
+
+
=
6
1
2
4
1
2
2
2
i
k
i
f
i
j
z
p
j
k
j
y
p
j
k
j
x
p
j
k
j
p k
q q B A C C
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 43
3.- Planificacin de Caminos
3.2. Algoritmo Gentico para la Planificacin de Caminos.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Utiliza poblaciones en paralelo con la tcnica de la
migracin.
Tiene mltiples poblaciones, independientes.
Cada poblacin se desarrolla utilizando algoritmo
gentico que usa poblaciones superpuestos.
En cada generacin, algunos individuos emigran de
una poblacin a otra.
Cada poblacin migra un nmero fijo de sus
mejores individuos a su vecino.
La poblacin principal se actualiza cada generacin
con el mejor individuo de cada poblacin.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 44
3.- Planificacin de Caminos
3.2. Algoritmo Gentico para la Planificacin de Caminos.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 46
3.- Planificacin de Caminos
3.2. Algoritmo Gentico para la Planificacin de Caminos.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin: La ruleta
Funcin Objetivo
Cruce
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 47
3.- Planificacin de Caminos
3.2. Algoritmo Gentico para la Planificacin de Caminos.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
( ) ( ) ( )
)
+ +
= =
+ + +
1
1 1
2
1
2
1
2
1
n
i
m
j
z
i
j
i
j
y
i
j
i
j
x
i
j
i
j
Minimize
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 48
3.- Planificacin de Caminos
3.2. Algoritmo Gentico para la Planificacin de Caminos.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 49
3.- Planificacin de Caminos
3.2. Algoritmo Gentico para la Planificacin de Caminos.
n
Dad
i
Dad Dad Dad
C C C C Dad
2 1
=
m
Mom
j
Mom Mom Mom
C C C C Mom
2 1
=
( ) ( ) ( ) { }
1 2 1
, ,..., , , ,
l
p
Mom
k
Dad
p
Mom
k
Dad
p
Mom
k
Dad
C C C C C C Mom Dad =
( ) ( ) ( ) { }
2 2 1
, ,..., , , ,
l
p
Dad
k
Mom
p
Dad
k
Mom
p
Dad
k
Mom
C C C C C C Dad Mom =
m
Mom
j
Mom
i
Dad Dad Dad
C C C C C sis Offspring
2 1
1 = =
n
Dad
i
Dad
j
Mom Mom Mom
C C C C C bro Offspring
2 1
2 = =
El Cruce
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 50
3.- Planificacin de Caminos
3.2. Algoritmo Gentico para la Planificacin de Caminos.
Reproduccin de un hijo slo
El Cruce
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 51
3.- Planificacin de Caminos
3.2. Algoritmo Gentico para la Planificacin de Caminos.
La
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 52
3.- Planificacin de Caminos
3.5. Ejemplos.
Benchmark 1: Obstculos patrn
Un conjunto de cinco configuraciones
iniciales y finales.
Para cada juego de configuraciones se
resuelven 10 entornos de trabajo:
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Los algoritmos presentados han sido
desarrollados utilizando Object
Oriented C++, y se han ejecutados en
un ordenador Intel Xeon CPU E5440 @
2.83 GHz, 8 GB de RAM.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 53
3.- Planificacin de Caminos
3.5. Ejemplos.
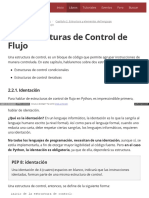
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
0
2
4
6
8
10
12
T
r
a
v
e
l
l
e
d
D
i
s
t
a
n
c
e
(
m
)
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49
GA
A1
A2
A3
A4
Examples
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 54
3.- Planificacin de Caminos
3.5. Ejemplos.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
50%
60%
70%
80%
90%
100%
110%
120%
1 5 9
1
3
1
7
2
1
2
5
2
9
3
3
3
7
4
1
4
5
4
9
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A1)
Average = 87,7%
50%
60%
70%
80%
90%
100%
110%
120%
1 5 9
1
3
1
7
2
1
2
5
2
9
3
3
3
7
4
1
4
5
4
9
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A2)
Average =
84,3%
50%
60%
70%
80%
90%
100%
110%
120%
1 5 9
1
3
1
7
2
1
2
5
2
9
3
3
3
7
4
1
4
5
4
9
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A3)
Average =
84,4%
40%
50%
60%
70%
80%
90%
100%
110%
120%
1 5 9
1
3
1
7
2
1
2
5
2
9
3
3
3
7
4
1
4
5
4
9
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A4)
Average =
68,8%
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 55
3.- Planificacin de Caminos
3.5. Ejemplos.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
1
10
100
1000
10000
100000
C
o
m
p
u
t
a
t
i
o
n
a
l
T
i
m
e
(
s
)
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49
A4
A1
A2
A3
GA
Examples
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 56
3.- Planificacin de Caminos
3.5. Ejemplos.
d
s
(m) t
c
(s) t
e
(s)
Benchmark 2
A1 5.82 17049 35
A2 5.41 16233 29
A3 5.43 2674 45
Thesis Results 4.3181 17782 1.6342
Benchmark 2: Aplicacin Industrial:
Comparacin de Resultados
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 57
NDICE
1. Introduccin
2. Modelado del Problema
3. Planificacin de Caminos
4. Planificacin de Trayectorias
5. Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 58
NDICE
1. Introduccin
2. Modelado del Problema
3. Planificacin de Caminos
4. Planificacin de Trayectorias
Mtodo Indirecto.
Configuraciones Adyacentes.
Obtencin de la Trayectoria
Ejemplos
5. Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 59
4.- Planificacin de Trayectorias
4.1. Mtodo Indirecto.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
Utiliza spline cbico forzado (Clamped).
Restricciones:
Fsicas: Velocidad, Aceleracin,
Sobreaceleracin.
Dinmicas: pares, potencia, energa.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 60
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
Tiempo
Gene 0
t
0
t
1
t
f-1
t
f
Gene f
4.- Planificacin de Trayectorias
4.1. Mtodo Indirecto.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 61
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin: La ruleta
Funcin Objetivo
Cruce
Mutacin
4.- Planificacin de Trayectorias
4.1. Mtodo Indirecto.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 62
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
=
=
f
i
i pk
t t
1
,
4.- Planificacin de Trayectorias
4.1. Mtodo Indirecto.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 63
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
arr
j
= RV(0, t
j,max
) [RV(0, t
j,max
) - RV(0, t
j,max
)]
gene
j
Bro
= arr
j
gene
j
Dad
+ (1 - arr
j
) gene
j
Mom
gene
j
Sis
= arr
j
gene
j
Mom
+ (1 - arr
j
) gene
j
Dad
4.- Planificacin de Trayectorias
4.1. Mtodo Indirecto.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 64
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
gene
j
= gene
j
+ RV(0, t
j,max
) [RV(0, t
j,max
) - RV(0, t
j,max
)]
4.- Planificacin de Trayectorias
4.1. Mtodo Indirecto.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 65
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
Se dice que las configuraciones C
p
, C
k
son adyacentes si
son factibles y cumple lo siguiente:
La distancia que pasa el elemento terminal para ir de C
p
a
C
k
es menor que el tamao de el obstculo ms pequeo.
Las distancias entre los puntos significativos de C
p
y C
k
tienen que ser menor que el tamao del obstculo ms
pequeo.
Minimiza la funcin:
Restricciones:
( ) ,... 2 , 1 ; 3 , 2 , 1 ; min 2 = = s j i r
j
k
i
p
i
( )
( )
( )
( )
|
|
|
|
|
|
.
|
\
|
+
+
+ + =
= =
4
1
2
2
2
6
1
2
2
j
z
p
j
k
j
y
p
j
k
j
x
p
j
k
j
i
k
i
f
i
p k
C q q B t A C C
6 ,.., 2 , 1
max, min,
= < < i
i i i
t t t
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 66
Obtencin de la Trayectoria de Tiempo Mnimo Entre Dos Configuraciones
Adyacentes
3 2
pk
pk
i pk
pk
i pk
pk
i
pk
i
pk
i
t d t c t b a q + + + =
2
3 2
pk
pk
i pk
pk
i
pk
i
pk
i
t d t c b q + + =
pk
pk
i
pk
i
pk
i
t d c q 6 2 + =
( )
( )
( )
( )
=
=
=
=
=
=
0
0 0
0
0
pk
pk
i
k
i pk
pk
i
pk
pk
i
p
i
pk
i
t q
q t q
t t
q
q q
t
( )
( )
p
i
k
i
pk
i
p
i
k
i
pk
i
pk
i
p
i
pk
i
q q
t
d
q q
t
c
b
q a
|
.
|
\
|
=
|
.
|
\
|
=
=
=
3
2
2
3
0
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 67
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
Utilizando un Algoritmo Gentico.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 68
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 69
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
gene(i) = RV(q
i,min
, q
i,max
); i = 1 6
Robot Configuration
Gene 1
Gene 6 Gene 7
q
1
q
2
q
3
q
4
q
5
q
6
t
pk
Time to be
optimized
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
gene(7) = RV(0.05, t
max
)
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 70
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin: La ruleta
Cruce
Mutacin
Funcin Objetivo
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 71
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Cruce de
un Punto
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 72
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
gene(i) = gene(i) + RV(q
i,min
, q
i,max
) [RV(q
i,min
, q
i,max
) - RV(q
i,min
, q
i,max
)]
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Mutacin
de un Gen
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 73
4.- Planificacin de Trayectorias
4.2. Configuraciones Adyacentes.
La obtencin de la configuracin C
k
Utilizando un Algoritmo Gentico.
Algoritmo Gentico:
Steady State Genetic Algorithm (SSGA)
Cromosoma
Seleccin
Cruce
Mutacin
Funcin Objetivo
( )
( )
( )
( )
|
|
|
|
|
|
.
|
\
|
+
+
+ + =
= =
4
1
2
2
2
6
1
2
2
j
z
p
j
k
j
y
p
j
k
j
x
p
j
k
j
i
k
i
f
i
p k
C q q B t A C C
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 74
4.- Planificacin de Trayectorias
4.3. Obtencin de la Trayectoria.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 75
4.- Planificacin de Trayectorias
4.3. Obtencin de la Trayectoria.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 76
4.- Planificacin de Trayectorias
4.3. Obtencin de la Trayectoria.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin: La ruleta
Funcin Objetivo
Cruce
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 77
4.- Planificacin de Trayectorias
4.3. Obtencin de la Trayectoria.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
=
=
f
i
i pk
t t
1
,
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 78
4.- Planificacin de Trayectorias
4.3. Obtencin de la Trayectoria.
Algoritmo Gentico:
Algoritmos Genticos Paralelos
Cromosoma
Seleccin
Funcin Objetivo
Cruce
Mutacin
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 79
4.- Planificacin de Trayectorias
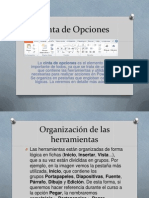
4.4. Resultados.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
17
18
19
20
21
22
23
0 50 100 150 200
No. of Generations
T
i
m
e
(
s
)
pc=0,35
pc=0,65
pc=0,95
Probabilidad de
Cruce = 0.95
Probabilidad de Mutacin
0.001 0.01 0.05 0.1 0.2 0.3 0.4
Tse and Wang 1998 20.156 19.880 18.211 18.226 18.929 18.957 19.062
Thesis Results 18.091 17.726 17.706 17.971 17.896 17.897 17.931
Ejemplo: Comparacin de resultados con Tse y Wang 1998.
Un camino de 10 configuraciones
incluidos la inicial y la final.
Las restricciones son de velocidad,
aceleracin, y sobreaceleracin.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 80
4.- Planificacin de Trayectorias
4.4. Resultados.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Ejemplo: Mtodo Indirecto.
-4,0
-3,0
-2,0
-1,0
0,0
1,0
2,0
0,0 0,5 1,0 1,5
Time (sec)
J
o
i
n
t
s
P
o
s
i
t
i
o
n
(
r
a
d
)
q1
q2
q3
-4
-2
0
2
4
0,0 0,5 1,0 1,5
Time (sec)
J
o
i
n
t
s
v
e
l
o
s
i
t
i
e
s
(
r
a
d
/
s
)
v1
v2
v3
-60
-40
-20
0
20
40
60
0,0 0,5 1,0 1,5
Time (sec)
J
o
i
n
t
s
a
c
c
e
l
e
r
a
t
i
o
n
s
(
r
a
d
/
s
.
s
)
a1
a2
a3
-200
-100
0
100
200
0,0 0,5 1,0 1,5
Time (sec)
J
o
i
n
t
s
t
o
r
q
u
e
(
N
.
m
)
TAU1
TAU2
TAU3
-300
-200
-100
0
100
200
300
400
0,0 0,5 1,0 1,5
Time (sec)
J
o
i
n
t
s
p
o
w
e
r
(
W
a
t
t
)
POT1
POT2
POT3
Las limitaciones de par (en N.m) son:
1
|140|,
2
|180|,
3
|140|,
4
|80|,
5
|80|,
6
|40|.
Las Limitaciones de potencia (en Watt) son:
Pot
1
|275|, Pot
2
|350|, Pot
3
|275|, Pot
4
|150|, Pot
5
|150|, Pot
6
|75|.
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 81
4.- Planificacin de Trayectorias
4.4. Resultados.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Benchmark 1: Obstculos patrn
Un conjunto de cinco configuraciones
iniciales y finales.
Para cada juego de configuraciones se
resuelven 4 entornos de trabajo:
1
10
100
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
E
x
e
c
u
t
i
o
n
T
i
m
e
(
s
)
A1 A2 A3 GA
0
2
4
6
8
10
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
T
r
a
v
e
l
l
e
d
D
i
s
t
a
n
c
e
(
m
)
A1 A2 A3 GA
1
10
100
1000
10000
100000
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
C
o
m
p
u
t
a
t
i
o
n
a
l
T
i
m
e
(
s
)
A1 A2 A3 GA
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 82
4.- Planificacin de Trayectorias
4.4. Resultados.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Benchmark 2: Obstculos patrn
15%
25%
35%
45%
55%
65%
75%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Execution Time Relation (GA / A1)
Average = 43%
15%
25%
35%
45%
55%
65%
75%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Execution Time Relation (GA / A2)
Average = 43%
15%
25%
35%
45%
55%
65%
75%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Execution Time Relation (GA / A3)
Average = 44%
0
2
4
6
8
10
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
E
x
e
c
u
t
i
o
n
T
i
m
e
(
s
e
c
)
A1
A2
A3
GA
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 83
4.- Planificacin de Trayectorias
4.4. Resultados.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Benchmark 2: Obstculos patrn
0
1
2
3
4
5
6
7
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
T
r
a
v
e
l
l
e
d
D
i
s
t
a
n
c
e
(
m
)
A1 A2
A3 GA
60%
70%
80%
90%
100%
110%
120%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A1)
Average = 93%
60%
70%
80%
90%
100%
110%
120%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A2)
Average = 92%
60%
70%
80%
90%
100%
110%
120%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A3)
Average = 92%
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 84
4.- Planificacin de Trayectorias
4.4. Resultados.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Benchmark 2: Obstculos patrn
0
1
2
3
4
5
6
7
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
T
r
a
v
e
l
l
e
d
D
i
s
t
a
n
c
e
(
m
)
A1 A2
A3 GA
60%
70%
80%
90%
100%
110%
120%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A1)
Average = 93%
60%
70%
80%
90%
100%
110%
120%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A2)
Average = 92%
60%
70%
80%
90%
100%
110%
120%
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
P
e
r
c
e
n
t
a
g
e
%
Travelled Distance Relation (GA / A3)
Average = 92%
0
5000
10000
15000
20000
25000
1 2 3 4 5 6 7 8 9
1
0
1
1
1
2
1
3
1
4
1
5
1
6
1
7
1
8
1
9
2
0
Examples
C
o
m
p
u
t
a
t
i
o
n
a
l
T
i
m
e
(
s
e
c
) A1
A2
A3
GA
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 85
4.- Planificacin de Trayectorias
4.4. Resultados.
Execution Time (s) Travelled Distance (m) Computational Time (s)
Indirect (Chapter 3)
0 Obstacle 2,00408 3,7358 13413
1 Obstacles 2,11442 3,8029 19805
2 Obstacles 2,37418 4,0187 16292
3 Obstacles 3,36064 4,1585 21408
Direct (Chapter 4)
0 Obstacle 1,68652 3,9446 4876
1 Obstacles 1,80759 4,0642 7321
2 Obstacles 1,96055 4,1335 6749
3 Obstacles 2,67079 4,2554 6799
Ejemplo : Comparacin entre resultados de
capitulo 3 y 4
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 86
4.- Planificacin de Trayectorias
4.4. Resultados.
Results of
this thesis
Benchmark 3
A1 A2 A3
t
e
(s) 1.42842 35.61 29.23 45.70
d
s
(m) 4.2556 5.82 5.41 5.43
t
c
(s) 28885 17049.94 16233.08 2674.69
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Benchmark 3: Aplicacin Industrial
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 87
4.- Planificacin de Trayectorias
4.4. Resultados.
t
e
(s) t
c
(s) d
e
(m) d
s
(m)
0 Obstacles 2.42217 12915 1.7106 4.7870
With Obstacles 3.85854 57080 1.7802 5.2227
Ejemplo : Aplicacin Industrial: Caso con y sin
Obstculos.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 88
4.- Planificacin de Trayectorias
4.4. Resultados.
t
e
(s) t
c
(s) d
e
(m) d
s
(m)
1.52102 9720-2173 1.1335 3.2619
Ejemplo : Aplicacin Industrial.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 89
NDICE
1. Introduccin
2. Modelado del Problema
3. Planificacin de Caminos
4. Planificacin de Trayectorias
5. Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 90
5.- Conclusiones
En esta tesis se ha construido dos algoritmos distintos basados en los
algoritmos genticos para resolver los problemas de planificacin de
Caminos y Trayectorias.
El espacio de trabajo se ha construido de modo que permite modificar su
dimensin segn sea necesario.
Se ha diseado nuevo procedimiento para realizar el cruce y la mutacin.
Los algoritmos presentados se han validado con una serie de ejemplos. Una
parte de estos ejemplos se ha comparado con los resultados de otros autores
demostrando una mejora por un promedio de 81.3% para la planificacin de
Caminos, y 43% para la planificacin de trayectorias.
El tiempo computacional es alto. Adems se incrementa cada vez que se
incrementa la complejidad del problema. Eso es la desventaja de los
algoritmos genticos en general. Sin embargo, como los robots industriales
trabajan de forma repetitiva, normalmente se hace la planificacin offline.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 91
5.- Conclusiones
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
PUBLICACIONES
Revisitas Fares Abu-Dakka, Francisco Valero, Jose Luis Suer, and Vicente Mata. An
Algorithm to Solve Trajectory Planning Problem Using Genetic Algorithm,
with Robot Dynamics Considerations, Mechanism and Machine Theory, under
reviewing.
Fares Abu-Dakka, Francisco Valero, Vicente Mata. Evolutionary Path Planning
Algorithm for Industrial Robots, Advance Robotics, under reviewing.
Congresos
Internacionales
Fares Abu-Dakka, Francisco Valero, Allan Tubaileh, and Francisco Rubio.
Obtaining Adjacent Configurations with Minimum Time Considering Robot
Dynamics, proceeding for the 12th IFToMM World Congress, Besanon
(France), June18-21, 2007
Fares Abu-Dakka, Francisco Valero, Vicente Mata, and Iyad F. I. Assad. PATH
Planning Optimization of Industrial Robots Using Genetic Algorithm,
proceeding for the 16th Int. Workshop on Robotics in Alpe-Adria-Danube Region
- RAAD 2007 Ljubljana, June 7-9, 2007
Fares Abu-Dakka, Francisco Valero, and Vicente Mata. Obtaining Adjacent
Configurations with Minimum Time Considering Robot Dynamics Using
Genetic Algorithms, proceeding for the 17th Int. Workshop on Robotics in Alpe-
Adria-Danube Region - RAAD 2008 Ancona, September 15-17, 2008
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Fares Jawad Abu-Dakka
Universitat Politcnica de Valncia
Valencia, Marzo de 2011 92
5.- Conclusiones
Futuros Trabajos
Ampliar el procedimiento introducido para incluir la orientacin del
elemento terminal.
Aplicar otros algoritmos de bsqueda como el algoritmo de las hormigas.
1. Introduccin 3. Caminos 5. Conclusiones
2. Problema 4. Trayectorias
Algoritmo Gentico Para La Planificacin De
Trayectorias En Robots Industriales
Presentado por: D. Fares Jawad Abu-Dakka
Dirigida por: Dr. Francisco Valero
Centro de Investigacin de Tecnologa de Vehculos (CITV)
Departamento de Ingeniera Mecnica y de Materiales (DIMM)
Universitat Politcnica de Valencia
TESIS DOCTORAL
DEPARTAMENTO DE INGENIERA MECNICA Y DE MATERIALES
También podría gustarte
- Ingenieria Del Software - Roger S. Pressman 6ta Edicion2 PDFDocumento980 páginasIngenieria Del Software - Roger S. Pressman 6ta Edicion2 PDFJavier Ibarra100% (6)
- Implementación de Un Sistema de Venta de Pasajes para Una Agencia de Viajes Mediante El Uso de GrafosDocumento3 páginasImplementación de Un Sistema de Venta de Pasajes para Una Agencia de Viajes Mediante El Uso de GrafosMiguel Angel Coria CaveroAún no hay calificaciones
- Ejemplo de Como Crear Una Base de Datos Con Visual BasicDocumento86 páginasEjemplo de Como Crear Una Base de Datos Con Visual BasicKarol Garbanzo Carballo90% (20)
- OPENCV - Integración de MediosDocumento20 páginasOPENCV - Integración de MedioscereteAún no hay calificaciones
- Tarea I Unidad IIIDocumento6 páginasTarea I Unidad IIITheWolfdark Drauner DakorianAún no hay calificaciones
- 2.2. Estructuras de Control de FlujoDocumento16 páginas2.2. Estructuras de Control de FlujogerarAún no hay calificaciones
- SO Silberschatz - Capítulo 04Documento7 páginasSO Silberschatz - Capítulo 04Daniela PetSocietiiAún no hay calificaciones
- Enrutamiento-Estatico Equipo 3Documento71 páginasEnrutamiento-Estatico Equipo 3Ulisses MoralesAún no hay calificaciones
- Actividad 6 Sistemas Operativos ODFGDocumento4 páginasActividad 6 Sistemas Operativos ODFGOscar DaliAún no hay calificaciones
- TC1 Ap1 Darwin HurtadoDocumento4 páginasTC1 Ap1 Darwin HurtadoJaison FacheAún no hay calificaciones
- MEMORIA RAM y LÓGICA DE TRANSFERENCIA DE REGISTROSDocumento38 páginasMEMORIA RAM y LÓGICA DE TRANSFERENCIA DE REGISTROSAlex Cusihuaman Huambo100% (1)
- Generaciones de Las Computadoras PDFDocumento6 páginasGeneraciones de Las Computadoras PDFOscar Gabriel Chávez GómezAún no hay calificaciones
- Netacad 3 ResumenDocumento24 páginasNetacad 3 ResumenXDXDXD100% (1)
- Tecnologias Graficas Intel y Sus ConfiguracionesDocumento41 páginasTecnologias Graficas Intel y Sus Configuracionesdeic017Aún no hay calificaciones
- Cinta de Opciones Power PointDocumento9 páginasCinta de Opciones Power Pointjuanjoi810% (1)
- RecuperAr Contraseña Router 2900Documento8 páginasRecuperAr Contraseña Router 2900Mome HernandezAún no hay calificaciones
- Laboratorio 2 Métodos Numéricos Avanzados en IngenieríaDocumento14 páginasLaboratorio 2 Métodos Numéricos Avanzados en IngenieríaGabrielAún no hay calificaciones
- Manu1 U2 Ea V1 RaicDocumento9 páginasManu1 U2 Ea V1 RaicRaúl Ibáñez Couoh100% (1)
- Teoria de PunterosDocumento15 páginasTeoria de PunterosJeffer Hoyos MajinAún no hay calificaciones
- Usando WinRS y WinrmDocumento3 páginasUsando WinRS y WinrmJoséMiguelLeonisioTorrejónAún no hay calificaciones
- JF 3 3 EspDocumento35 páginasJF 3 3 EspDenzel HernandezAún no hay calificaciones
- Cuestionario de WindowsDocumento4 páginasCuestionario de WindowsJoseLuisCarrilloAún no hay calificaciones
- Macros en MatlabDocumento2 páginasMacros en MatlabRuth ApazaAún no hay calificaciones
- Redes y Procesamiento de DatosDocumento17 páginasRedes y Procesamiento de DatosjoseAún no hay calificaciones
- Modelo en VDocumento2 páginasModelo en VMichel Angelo100% (1)
- SGY 2016 2017 Doc01 UT 1 CortafuegosConIPTABLESDocumento6 páginasSGY 2016 2017 Doc01 UT 1 CortafuegosConIPTABLESa034273Aún no hay calificaciones
- Electronica y Computacion - Un Pic Por Dentro - Diagrama en Bloques Del 15f84Documento4 páginasElectronica y Computacion - Un Pic Por Dentro - Diagrama en Bloques Del 15f84Anonymous iTHJZaFR0ZAún no hay calificaciones
- Manejo de Archivos y Directorios UNIXDocumento6 páginasManejo de Archivos y Directorios UNIXGustav Roldden VentrueAún no hay calificaciones
- PRACTICA No 5 ZELIO SOFTDocumento15 páginasPRACTICA No 5 ZELIO SOFTManuel Lopez100% (1)
- Preguntas U 4Documento2 páginasPreguntas U 4xiadany100% (1)