También podría gustarte
- Programação Em Assembly Para O Microcontrolador Pic12f Volume IDe EverandProgramação Em Assembly Para O Microcontrolador Pic12f Volume ICalificación: 5 de 5 estrellas5/5 (1)
- Microcontrolador PIC16F877: Introdução e AplicaçõesDocumento88 páginasMicrocontrolador PIC16F877: Introdução e AplicaçõesTeo JavaAún no hay calificaciones
- Microcontrolador PicDocumento18 páginasMicrocontrolador PicRafael AraujoAún no hay calificaciones
- Apostila Completa MPLAB PICDocumento225 páginasApostila Completa MPLAB PICnorpirayahoo0% (1)
- Aprendendo PICs 40cDocumento3 páginasAprendendo PICs 40cMarcus GonzalesAún no hay calificaciones
- Manual do drive para motor de passo modelo AKDMP5-1.7ADocumento17 páginasManual do drive para motor de passo modelo AKDMP5-1.7AelderpaesAún no hay calificaciones
- Shield LCD 16x2 Com Keypad - Arduino e Cia PDFDocumento18 páginasShield LCD 16x2 Com Keypad - Arduino e Cia PDFestevao_moraesAún no hay calificaciones
- Apostila Proteus ISISDocumento81 páginasApostila Proteus ISISWesllen Dias SouzaAún no hay calificaciones
- (HOW-To) Instalando Entrada Auxiliar No Som Do Stilo Versão MID - Artigos & How To - Clube Stilo BrasilDocumento12 páginas(HOW-To) Instalando Entrada Auxiliar No Som Do Stilo Versão MID - Artigos & How To - Clube Stilo BrasilLaffert Gomes100% (1)
- Manual - Kit ClpPic40B v2.1Documento13 páginasManual - Kit ClpPic40B v2.1Diogo GonçalvesAún no hay calificaciones
- Programação de CLP Básico - Conceitos e Configurações IniciaisDocumento244 páginasProgramação de CLP Básico - Conceitos e Configurações IniciaisRamon MotaAún no hay calificaciones
- Introdução à programação lógica em escada com LDmicroDocumento22 páginasIntrodução à programação lógica em escada com LDmicrorcimplastAún no hay calificaciones
- Manual STEP 5 V6.6 - Programação de Estação de Lavagem de CarrosDocumento51 páginasManual STEP 5 V6.6 - Programação de Estação de Lavagem de CarrosGilmacribdAún no hay calificaciones
- Osciloscópio USBDocumento91 páginasOsciloscópio USBJoyceCrisAún no hay calificaciones
- Conectando Um Display LCD No PICDocumento52 páginasConectando Um Display LCD No PICAsdhdhadAún no hay calificaciones
- Apostila C PICDocumento324 páginasApostila C PICSapinho FreitasAún no hay calificaciones
- Curso Manutenção de Notebooks + Placa-Mãe + Solda BGA em Maringá (Junho/2013)Documento6 páginasCurso Manutenção de Notebooks + Placa-Mãe + Solda BGA em Maringá (Junho/2013)Millennium TecnologiaAún no hay calificaciones
- Microprocessador 8085Documento28 páginasMicroprocessador 8085Gustavo BritoAún no hay calificaciones
- Conversor A/D com PIC - Termômetro e multímetro digitaisDocumento8 páginasConversor A/D com PIC - Termômetro e multímetro digitaisalexandresjr7Aún no hay calificaciones
- Apostila XL 40 p2Documento37 páginasApostila XL 40 p2Terra PassosAún no hay calificaciones
- Amplificadores Classe D e Circuitos de ÁudioDocumento14 páginasAmplificadores Classe D e Circuitos de ÁudioMickShazanAún no hay calificaciones
- Gerar Ondas com OsciloscópioDocumento6 páginasGerar Ondas com OsciloscópioVictor De Souza AlmeidaAún no hay calificaciones
- Treinamento Cps 4000Documento101 páginasTreinamento Cps 4000Yuri QueirozAún no hay calificaciones
- Tutorial Pedal Control Ad or USB Guitar RigDocumento8 páginasTutorial Pedal Control Ad or USB Guitar Rigjfdiasmendes100% (1)
- TPW 04 Modbus RtuDocumento70 páginasTPW 04 Modbus RtuGilson PaulattiAún no hay calificaciones
- Bancada CLP SchneiderDocumento10 páginasBancada CLP Schneiderdramos11Aún no hay calificaciones
- Mux Demux 4canaisDocumento4 páginasMux Demux 4canaisJoaquim TomazAún no hay calificaciones
- Apostila PIC 16F628 (Prof. Wagner de Aguiar - IfSP)Documento145 páginasApostila PIC 16F628 (Prof. Wagner de Aguiar - IfSP)Ricardo Lima de Almeida100% (1)
- Frequencímetro Com PICDocumento2 páginasFrequencímetro Com PICd3r0c1Aún no hay calificaciones
- Manual do Relógio de Ponto MICROPOINT SDocumento26 páginasManual do Relógio de Ponto MICROPOINT SOneir Lima0% (1)
- 2 Manual CLP Pic40 v3Documento14 páginas2 Manual CLP Pic40 v3filipegomessilvaAún no hay calificaciones
- Curso de Reparo em Impressora Epson LX 300Documento6 páginasCurso de Reparo em Impressora Epson LX 300Ricarte BalbinoAún no hay calificaciones
- Fonte chaveada simetrica SMPS 600W IR2153Documento4 páginasFonte chaveada simetrica SMPS 600W IR2153Manoel Calheiros100% (1)
- McLab2 Hardware e Software CompletoDocumento29 páginasMcLab2 Hardware e Software CompletoRamon H SouzaAún no hay calificaciones
- Calendário de atividades e avaliações de disciplinaDocumento40 páginasCalendário de atividades e avaliações de disciplinaThaylane NogueiraAún no hay calificaciones
- SPI-Flash Programmer ManualDocumento4 páginasSPI-Flash Programmer ManualAlbert NewtonAún no hay calificaciones
- Manual IS1423G PDFDocumento36 páginasManual IS1423G PDFJeffersonAún no hay calificaciones
- Multiplexacion Isdb-TDocumento141 páginasMultiplexacion Isdb-TFernando MartinezAún no hay calificaciones
- Programação básica de CLP com memórias internas e simulação de 3 motoresDocumento63 páginasProgramação básica de CLP com memórias internas e simulação de 3 motoresWesley DavidAún no hay calificaciones
- Roland Alpha 07Documento13 páginasRoland Alpha 07dudarp100% (1)
- PIC16 F 628 ADocumento0 páginasPIC16 F 628 ADaniel TaveiraAún no hay calificaciones
- Sistema de amplificação Audimax SD SeriesDocumento14 páginasSistema de amplificação Audimax SD SeriesGilberto RodriguesAún no hay calificaciones
- Apostila de CLP Nivel BasicoDocumento104 páginasApostila de CLP Nivel Basiconilsonery100% (1)
- Construindo Um Gravador de PICDocumento26 páginasConstruindo Um Gravador de PICjoseadnilson100% (1)
- Como ler esquemas elétricosDocumento7 páginasComo ler esquemas elétricosHumberto Cadori FilhoAún no hay calificaciones
- Apostila - Microcontrolador PIC16F84 PDFDocumento116 páginasApostila - Microcontrolador PIC16F84 PDFDaniel HenriqueAún no hay calificaciones
- Temporizador 555: Funcionamento e aplicações do circuito integrado mais versátilDocumento11 páginasTemporizador 555: Funcionamento e aplicações do circuito integrado mais versátilMichel BackAún no hay calificaciones
- Programação Em C E Assembly Para A Família Mc68hc908De EverandProgramação Em C E Assembly Para A Família Mc68hc908Aún no hay calificaciones
- Desenvolvendo Um Medidor De Vazão Para A Rede Can Programado Em ArduinoDe EverandDesenvolvendo Um Medidor De Vazão Para A Rede Can Programado Em ArduinoAún no hay calificaciones
- Antologia De Projetos No Arduino Com Display Lcd Volume VDe EverandAntologia De Projetos No Arduino Com Display Lcd Volume VAún no hay calificaciones
- Curso LPI LinuxDocumento3 páginasCurso LPI LinuxluisAún no hay calificaciones
- Lista Exercícios Redes Computadores UFERSADocumento16 páginasLista Exercícios Redes Computadores UFERSAGiovanni GuimarãesAún no hay calificaciones
- Simulado Computação em Nuvem Ava2Documento5 páginasSimulado Computação em Nuvem Ava2Doctor KillAún no hay calificaciones
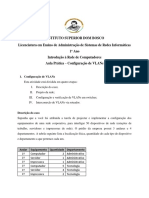
- Config VLANs Rede CorporativaDocumento18 páginasConfig VLANs Rede CorporativaYuri YcAún no hay calificaciones
- Guia de Instalação Do SPED 64 Bits-V2Documento13 páginasGuia de Instalação Do SPED 64 Bits-V2Marcelo de AzevedoAún no hay calificaciones
- Aula2 1 RevisadoDocumento14 páginasAula2 1 RevisadoQualidadeSidertecnicAún no hay calificaciones
- Estudo de Performance Das Arquiteturas Risc e CiscDocumento6 páginasEstudo de Performance Das Arquiteturas Risc e CiscGeraldo Rabelo JúniorAún no hay calificaciones
- 3 Formas de Copiar Arquivos No Prompt de ComandoDocumento4 páginas3 Formas de Copiar Arquivos No Prompt de ComandoAlex Robson Dos Anjos Dos SantosAún no hay calificaciones
- Segurança de Redes e Sistemas curso com arquivos e instruçõesDocumento5 páginasSegurança de Redes e Sistemas curso com arquivos e instruçõesAdalício SantosAún no hay calificaciones
- Manual Usuário DVRDocumento19 páginasManual Usuário DVRSuzange PereiraAún no hay calificaciones
- Padrao WANDocumento2 páginasPadrao WANZeca SoutoAún no hay calificaciones
- Protocolo RIPDocumento21 páginasProtocolo RIPWiltemberg LimaAún no hay calificaciones
- Threads em Java - Conceitos e CriaçãoDocumento49 páginasThreads em Java - Conceitos e CriaçãoMax WeltonAún no hay calificaciones
- Aula 07 - ExerciciosDocumento5 páginasAula 07 - ExerciciosLuciano FerreiraAún no hay calificaciones
- Alocação de memória com first-fit, best-fit, worst-fit e next-fitDocumento2 páginasAlocação de memória com first-fit, best-fit, worst-fit e next-fitTarcísio azevedoAún no hay calificaciones
- Forced Download decodificador SAGEMCOM SAG4K362Documento1 páginaForced Download decodificador SAGEMCOM SAG4K362Davi GomesAún no hay calificaciones
- Aspire 3Documento2 páginasAspire 3Charmander CharmandescoAún no hay calificaciones
- Circuito seleção memórias 8KDocumento8 páginasCircuito seleção memórias 8KGabriela Barbieri AlvarezAún no hay calificaciones
- Multilaser PRO by ZTE - Primeiros PassosDocumento50 páginasMultilaser PRO by ZTE - Primeiros PassosSamuel JesusAún no hay calificaciones
- Linux para Concursos: Gratuito, Estável e PersonalizávelDocumento0 páginasLinux para Concursos: Gratuito, Estável e Personalizávellauralima_1Aún no hay calificaciones
- PT-BR Ethical Hacking With Kali Linux Learn Fast How To Hack Like A ProDocumento166 páginasPT-BR Ethical Hacking With Kali Linux Learn Fast How To Hack Like A ProGabriel SilvaAún no hay calificaciones
- Fundamental - 6 - Ano - Placa MãeDocumento4 páginasFundamental - 6 - Ano - Placa MãeCristiane Martins de OliveiraAún no hay calificaciones
- Asus Manual Placa Mae bp8599 - h81m SeriesDocumento48 páginasAsus Manual Placa Mae bp8599 - h81m SeriesRalph WillianAún no hay calificaciones
- Lista de exercícios sobre Redes de ComputadoresDocumento3 páginasLista de exercícios sobre Redes de ComputadoresSandra RodriguesAún no hay calificaciones
- Como Configurar Um Servidor DNS No Windows 2003 Server PDFDocumento2 páginasComo Configurar Um Servidor DNS No Windows 2003 Server PDFDarrellAún no hay calificaciones
- Servidor Dell PowerEdge R710Documento6 páginasServidor Dell PowerEdge R710Carlos Henrique NucciAún no hay calificaciones
- TechNet Brasil - Capítulo 5 - Implementação, Administração e Monitoração Da Diretiva de GruposDocumento36 páginasTechNet Brasil - Capítulo 5 - Implementação, Administração e Monitoração Da Diretiva de GruposTitoAún no hay calificaciones
- Linux - Samba (PT - BR)Documento88 páginasLinux - Samba (PT - BR)Alfredo FariaAún no hay calificaciones
- 2 - Processos e ThreadsDocumento78 páginas2 - Processos e ThreadslukkassAún no hay calificaciones
- Instalando Asterisk em VM DebianDocumento67 páginasInstalando Asterisk em VM DebianAna KarinaAún no hay calificaciones