También podría gustarte
- Electronic Structure Calculations on Graphics Processing Units: From Quantum Chemistry to Condensed Matter PhysicsDe EverandElectronic Structure Calculations on Graphics Processing Units: From Quantum Chemistry to Condensed Matter PhysicsRoss C. WalkerAún no hay calificaciones
- Applsci 12 09599 v2Documento14 páginasApplsci 12 09599 v2Ťüšhâř ĶêšãvâñAún no hay calificaciones
- Realtime Ray Tracing on GPU with BVHDocumento6 páginasRealtime Ray Tracing on GPU with BVHTeaaAún no hay calificaciones
- FPGA Implementation of Systolic Array Architecture For 3D-DWT Optimizing Speed and PowerDocumento12 páginasFPGA Implementation of Systolic Array Architecture For 3D-DWT Optimizing Speed and PowerIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalAún no hay calificaciones
- Achieving On-Mobile Real-Time Super-Resolution With Neural Architecture and Pruning SearchDocumento11 páginasAchieving On-Mobile Real-Time Super-Resolution With Neural Architecture and Pruning SearchThuan NguyenAún no hay calificaciones
- LinkNet - Exploiting Encoder Representations For Efficient Semantic SegmentationDocumento5 páginasLinkNet - Exploiting Encoder Representations For Efficient Semantic SegmentationMario Galindo QueraltAún no hay calificaciones
- Real-Time SAH BVH Construction For Ray Tracing Dynamic ScenesDocumento4 páginasReal-Time SAH BVH Construction For Ray Tracing Dynamic ScenesDenis BogolepovAún no hay calificaciones
- New VLSI Architecture For Motion Estimation Algorithm: V. S. K. Reddy, S. Sengupta, and Y. M. LathaDocumento4 páginasNew VLSI Architecture For Motion Estimation Algorithm: V. S. K. Reddy, S. Sengupta, and Y. M. LathaAlex RosarioAún no hay calificaciones
- Ray Engine Accelerates Ray Tracing on GPUDocumento31 páginasRay Engine Accelerates Ray Tracing on GPUSpoll1927Aún no hay calificaciones
- Applied Acoustics: Konstantinos Gkanos, Finnur Pind, Hans Henrik Brandenborg Sørensen, Cheol-Ho JeongDocumento9 páginasApplied Acoustics: Konstantinos Gkanos, Finnur Pind, Hans Henrik Brandenborg Sørensen, Cheol-Ho JeongRoshanAún no hay calificaciones
- An Efficient ASIC Architecture for Real-time Edge DetectionDocumento10 páginasAn Efficient ASIC Architecture for Real-time Edge Detectionprakashjyoti0901Aún no hay calificaciones
- Efficient GPU Screen-Space Ray TracingDocumento13 páginasEfficient GPU Screen-Space Ray TracingOlaru OlaruAún no hay calificaciones
- An FPGA Based Generic Framework For High Speed Sum of Absolute Difference ImplementationDocumento24 páginasAn FPGA Based Generic Framework For High Speed Sum of Absolute Difference ImplementationThippeswamy KhAún no hay calificaciones
- A CNN Accelerator On FPGA Using Depthwise Separable ConvolutionDocumento5 páginasA CNN Accelerator On FPGA Using Depthwise Separable ConvolutionTuhin KarakAún no hay calificaciones
- Design and Implementation of Convolutional Neural Network Accelerator Based On RISCVDocumento6 páginasDesign and Implementation of Convolutional Neural Network Accelerator Based On RISCVmadupiz@gmailAún no hay calificaciones
- GPU QuicksortDocumento22 páginasGPU QuicksortKriti JhaAún no hay calificaciones
- Efficient GPU Path Rendering Using Scanline RasterizationDocumento12 páginasEfficient GPU Path Rendering Using Scanline Rasterizationmarco nordiAún no hay calificaciones
- Fast Mobile DepthDocumento10 páginasFast Mobile Depthder tupAún no hay calificaciones
- Coherent Hierarchical Culling: Hardware Occlusion Queries Made UsefulDocumento10 páginasCoherent Hierarchical Culling: Hardware Occlusion Queries Made UsefulAlexx AlexAún no hay calificaciones
- A Real-Time Object Detection Processor With Xnor-BDocumento13 páginasA Real-Time Object Detection Processor With Xnor-BcattiewpieAún no hay calificaciones
- IEEEVis2016 OSPRay Paper SmallDocumento10 páginasIEEEVis2016 OSPRay Paper SmallSteve AttwoodAún no hay calificaciones
- Auto Splats: Dynamic Point Cloud Visualization On The GPUDocumento10 páginasAuto Splats: Dynamic Point Cloud Visualization On The GPU张啊康Aún no hay calificaciones
- Interactive Inspection of Complex Multi-Object Industrial AssembliesDocumento17 páginasInteractive Inspection of Complex Multi-Object Industrial AssembliesRares BentaAún no hay calificaciones
- A Directional-Edge-Based Real-Time Object Tracking System Employing Multiple Candidate-Location GenerationDocumento15 páginasA Directional-Edge-Based Real-Time Object Tracking System Employing Multiple Candidate-Location Generationroychan1012Aún no hay calificaciones
- Image Processing Using Fpgas: ImagingDocumento4 páginasImage Processing Using Fpgas: ImagingAnonymous s516rsAún no hay calificaciones
- Concurrent Queue For Irr Workload On GpuDocumento11 páginasConcurrent Queue For Irr Workload On GpuJash KhatriAún no hay calificaciones
- CUDA Cuts Fast Graph Cuts On The GPUDocumento8 páginasCUDA Cuts Fast Graph Cuts On The GPUas.dcdvfdAún no hay calificaciones
- Betweenness Centrality On Gpus and Heterogeneous ArchitecturesDocumento10 páginasBetweenness Centrality On Gpus and Heterogeneous Architecturesqwerty1214Aún no hay calificaciones
- An Efficient CNN Accelerator Using Inter-Frame Data Reuse of Videos On FPGAsDocumento14 páginasAn Efficient CNN Accelerator Using Inter-Frame Data Reuse of Videos On FPGAspalansamyAún no hay calificaciones
- Electronics 08 00065Documento19 páginasElectronics 08 00065Maryam WaheedAún no hay calificaciones
- Hybrid CPU-GPU SystemDocumento9 páginasHybrid CPU-GPU SystemGary Ryan DonovanAún no hay calificaciones
- An Automatic Circuit Design Framework For Level Shifter CircuitsDocumento13 páginasAn Automatic Circuit Design Framework For Level Shifter CircuitsVani YamaniAún no hay calificaciones
- Scherl07 IOTDocumento10 páginasScherl07 IOTSuresh K KrishnasamyAún no hay calificaciones
- IEEE AccessDocumento15 páginasIEEE AccessHassan MostafaAún no hay calificaciones
- Electronics: FPGA Implementation For CNN-Based Optical Remote Sensing Object DetectionDocumento24 páginasElectronics: FPGA Implementation For CNN-Based Optical Remote Sensing Object Detection楊凱閔Aún no hay calificaciones
- Mobilepotrait c&g19Documento10 páginasMobilepotrait c&g19yueyue19991013Aún no hay calificaciones
- Improving The Performance of A Ray Tracing Algorithm Using A GPUDocumento10 páginasImproving The Performance of A Ray Tracing Algorithm Using A GPUŤüšhâř ĶêšãvâñAún no hay calificaciones
- Real Time Object Detection Using CNNDocumento5 páginasReal Time Object Detection Using CNNyevanAún no hay calificaciones
- 6 SegnetDocumento14 páginas6 SegnetSUMOD SUNDARAún no hay calificaciones
- Research Article: System Architecture For Real-Time Face Detection On Analog Video CameraDocumento11 páginasResearch Article: System Architecture For Real-Time Face Detection On Analog Video CameraWafa BenzaouiAún no hay calificaciones
- Visual Cross-Image Fusion Using Deep Neural Networks Achieves High Accuracy Edge DetectionDocumento12 páginasVisual Cross-Image Fusion Using Deep Neural Networks Achieves High Accuracy Edge DetectionWilluAún no hay calificaciones
- Real-Time Approximate and Combined 2D Convolvers FDocumento29 páginasReal-Time Approximate and Combined 2D Convolvers Fsyncc500Aún no hay calificaciones
- 3 ENetDocumento10 páginas3 ENetAnandAún no hay calificaciones
- Image Parallel Processing Based On GPU PDFDocumento4 páginasImage Parallel Processing Based On GPU PDFEider CarlosAún no hay calificaciones
- Image Restoration Using Deep LearningDocumento12 páginasImage Restoration Using Deep LearningInternational Journal of Innovative Science and Research TechnologyAún no hay calificaciones
- Design of Reconfigurable Array Processor For Multimedia ApplicationDocumento19 páginasDesign of Reconfigurable Array Processor For Multimedia ApplicationAl-Ami SarkerAún no hay calificaciones
- Vision GNN: An Image Is Worth Graph of Nodes: Equal ContributionDocumento14 páginasVision GNN: An Image Is Worth Graph of Nodes: Equal ContributionvinoAún no hay calificaciones
- Parallel Ray Tracing Using Mpi and Openmp: January 2008Documento18 páginasParallel Ray Tracing Using Mpi and Openmp: January 2008Chandan SinghAún no hay calificaciones
- Real-Time Obstacle Detection Using Range Images: Processing Dynamically-Sized Sliding Windows On A GPUDocumento13 páginasReal-Time Obstacle Detection Using Range Images: Processing Dynamically-Sized Sliding Windows On A GPURoger SacchelliAún no hay calificaciones
- Eficient Integration of TSDF in Mobile Devices 2023Documento10 páginasEficient Integration of TSDF in Mobile Devices 2023jomamuregAún no hay calificaciones
- Group 3 - Project - Paper Review - Comp ArcDocumento9 páginasGroup 3 - Project - Paper Review - Comp Arcdevaneyan kumarAún no hay calificaciones
- A High-Throughput and Power-Efficient FPGA Implementation of Yolo CNN For Object DetectionDocumento13 páginasA High-Throughput and Power-Efficient FPGA Implementation of Yolo CNN For Object DetectionVinh Lê HữuAún no hay calificaciones
- U-Net Convolutional Network for Biomedical Image SegmentationDocumento8 páginasU-Net Convolutional Network for Biomedical Image SegmentationUsman SaeedAún no hay calificaciones
- EDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkDocumento15 páginasEDGE-Net: Efficient Deep-Learning Gradients Extraction NetworkAdam HansenAún no hay calificaciones
- Persistent Grid MappingDocumento10 páginasPersistent Grid Mappingxarek-zaudorAún no hay calificaciones
- An Efficient Sorting Algorithm With CUDADocumento8 páginasAn Efficient Sorting Algorithm With CUDA87zeroAún no hay calificaciones
- DVR Based ThesisDocumento5 páginasDVR Based Thesistinajordanhuntsville100% (1)
- Survey On Change Detection Techniques For Multitemporal Aerial Video SequencesDocumento11 páginasSurvey On Change Detection Techniques For Multitemporal Aerial Video SequencesIJRASETPublicationsAún no hay calificaciones
- Design of Flexible Hardware Accelerators For Image Convolutions and Transposed ConvolutionsDocumento16 páginasDesign of Flexible Hardware Accelerators For Image Convolutions and Transposed ConvolutionsYogeshwar nath singhAún no hay calificaciones
- Pragmatic Skills Checklist - 0Documento4 páginasPragmatic Skills Checklist - 0rathishvAún no hay calificaciones
- Automatic fabric spreader and cutting machinesDocumento12 páginasAutomatic fabric spreader and cutting machinesPayal MahantAún no hay calificaciones
- Tape Op 131 Subscriber 243028Documento76 páginasTape Op 131 Subscriber 243028ZenergiaAún no hay calificaciones
- One in A MillionDocumento4 páginasOne in A MillionVasu DevanAún no hay calificaciones
- Cartilla Preicfes Once 3 Periodo 2021Documento3 páginasCartilla Preicfes Once 3 Periodo 2021Elver GalindoAún no hay calificaciones
- Activate! B2 Extra Vocabulary Tests Test 9: The ShopsDocumento5 páginasActivate! B2 Extra Vocabulary Tests Test 9: The ShopsIsaac CarrilloAún no hay calificaciones
- 90 Blue Plus ProgrammingDocumento2 páginas90 Blue Plus ProgrammingDaniel TaradaciucAún no hay calificaciones
- WantedDocumento6 páginasWantedAlbeth Yuan WijayaAún no hay calificaciones
- Works Series II II 1 Wq139Documento14 páginasWorks Series II II 1 Wq139Simona GastoldiAún no hay calificaciones
- Fernando Amorsolo's "Dalagang BukidDocumento4 páginasFernando Amorsolo's "Dalagang BukidSinead MolinosAún no hay calificaciones
- Betty Bolte - Dressage - 2002Documento65 páginasBetty Bolte - Dressage - 2002Laura CimpoesuAún no hay calificaciones
- BTS Chun-Li Song LyricsDocumento3 páginasBTS Chun-Li Song LyricsAlek RojasAún no hay calificaciones
- How To File A FPLDocumento2 páginasHow To File A FPLElliot BennettAún no hay calificaciones
- Bosch To BruegelDocumento45 páginasBosch To BruegelAnonymous yAH8LaVDUCAún no hay calificaciones
- POEA Records VerificationDocumento2 páginasPOEA Records VerificationERROYD KEVIN TOLENTINOAún no hay calificaciones
- 88H Manual - IdiposDocumento8 páginas88H Manual - IdiposErfan OktafianAún no hay calificaciones
- Read About This Traditional Wedding, Then Answer The True/false QuestionsDocumento2 páginasRead About This Traditional Wedding, Then Answer The True/false QuestionsMisha ZhegulovtsevAún no hay calificaciones
- Basic Dance Steps in 4/4 Time SignatureDocumento23 páginasBasic Dance Steps in 4/4 Time SignatureErma PolintangAún no hay calificaciones
- ICT and Entrepreneurship TX Week 10Documento13 páginasICT and Entrepreneurship TX Week 10Vicmyla Mae A. CabonelasAún no hay calificaciones
- Analisis Sonata Mozart PDFDocumento10 páginasAnalisis Sonata Mozart PDFarodcar564Aún no hay calificaciones
- Let's Talk About: Conversation CardsDocumento1 páginaLet's Talk About: Conversation CardsElena B. Herrero100% (1)
- Mechanical Puller Catalog - EU PDFDocumento20 páginasMechanical Puller Catalog - EU PDFAlvaroAún no hay calificaciones
- 512 Vic On SW ManualDocumento289 páginas512 Vic On SW ManualSam StuartAún no hay calificaciones
- New Fakes of Standing Caliph Coins / Ingrid SchulzeDocumento8 páginasNew Fakes of Standing Caliph Coins / Ingrid SchulzeDigital Library Numis (DLN)Aún no hay calificaciones
- PC Venetica ENG ManualDocumento64 páginasPC Venetica ENG Manualandrewh3Aún no hay calificaciones
- DS-2CE76K0T-EXLPF Datasheet 20230605Documento4 páginasDS-2CE76K0T-EXLPF Datasheet 20230605Jorge CaleroAún no hay calificaciones
- BIOS Seminar PresentationDocumento23 páginasBIOS Seminar PresentationVIKALP KULSHRESTHA67% (3)
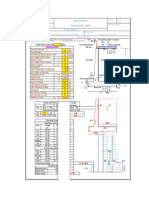
- Design of Retaining Wall Type1 As Per ACI-318-95Documento3 páginasDesign of Retaining Wall Type1 As Per ACI-318-95DIRACLTDAAún no hay calificaciones
- Radio Nepal Is The State-Owned Radio Broadcasting Organisation of Nepal, Which Was Established On 2Documento2 páginasRadio Nepal Is The State-Owned Radio Broadcasting Organisation of Nepal, Which Was Established On 2Sundar GwachhaAún no hay calificaciones
- How To Install HolyQuran 8 in Windows 7Documento9 páginasHow To Install HolyQuran 8 in Windows 7Badruddin HarunAún no hay calificaciones