También podría gustarte
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- CirclesDocumento15 páginasCirclesJustine ReanAún no hay calificaciones
- Chapter 20Documento58 páginasChapter 20Santiago Orellana CAún no hay calificaciones
- Angles Math ProblemsDocumento7 páginasAngles Math ProblemsRamkumar SundaramAún no hay calificaciones
- Construction Surveying and LayoutDocumento55 páginasConstruction Surveying and LayoutElla TalinoAún no hay calificaciones
- Solving Oblique Triangles Grade 9 MathDocumento5 páginasSolving Oblique Triangles Grade 9 Mathreyes emerieAún no hay calificaciones
- CH7Documento159 páginasCH7yvg95Aún no hay calificaciones
- Motion in a Straight Line Chapter 3 SolutionsDocumento46 páginasMotion in a Straight Line Chapter 3 Solutionsdivyashishtomar57% (21)
- Area of Plane FiguresDocumento28 páginasArea of Plane Figuresajmanrique 1988Aún no hay calificaciones
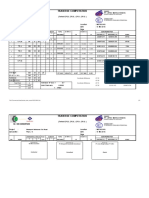
- Cikampek Palimanan Toll Road Traverse ComputationDocumento3 páginasCikampek Palimanan Toll Road Traverse ComputationdedeAún no hay calificaciones
- ACCELERATION AND MOTIONDocumento4 páginasACCELERATION AND MOTIONTrixia MadrigalAún no hay calificaciones
- Volume and Surface Area WorkbookDocumento41 páginasVolume and Surface Area WorkbookPopAún no hay calificaciones
- Angles FundamentalsDocumento7 páginasAngles FundamentalsLovely Amor CatipayAún no hay calificaciones
- Mathematics P2 Feb-March 2014 Memo Afr & EngDocumento14 páginasMathematics P2 Feb-March 2014 Memo Afr & Engaleck mthethwaAún no hay calificaciones
- Practice Test Trig Unit 1 Answer KeyDocumento4 páginasPractice Test Trig Unit 1 Answer KeysdenoyerAún no hay calificaciones
- Kuta Riemann SumsDocumento4 páginasKuta Riemann SumsJon HadleyAún no hay calificaciones
- Geometry: Volume of Rectangular and Triangular PrismsDocumento19 páginasGeometry: Volume of Rectangular and Triangular PrismsMedina WuistonAún no hay calificaciones
- LN 3 Motion in 2DDocumento40 páginasLN 3 Motion in 2DPraveen SAún no hay calificaciones
- 11 Secant AnglesDocumento4 páginas11 Secant AnglesAnwar HossainAún no hay calificaciones
- Potongan Materi John Bird Engineering Mathematics 0750685557-Halaman-493-499Documento7 páginasPotongan Materi John Bird Engineering Mathematics 0750685557-Halaman-493-499Maily MardliyahAún no hay calificaciones
- 5th Grade Math Georgia Milestones Study GuideDocumento4 páginas5th Grade Math Georgia Milestones Study Guideemmaniaunty100% (1)
- Your Warm Up Today Is The R.1&R.2 Review Ws On Itunes U.: R.3 Right Triangles in Q1Documento13 páginasYour Warm Up Today Is The R.1&R.2 Review Ws On Itunes U.: R.3 Right Triangles in Q1api-444439435Aún no hay calificaciones
- 682 SMP Seaa C10L04Documento5 páginas682 SMP Seaa C10L04Bobby OngAún no hay calificaciones
- Area Triangle BasicDocumento2 páginasArea Triangle BasicAsfaw Kelbessa0% (2)
- TRANSITDocumento24 páginasTRANSITIrah Kenth Owenson OberaAún no hay calificaciones
- Chapter 4 CompilationDocumento13 páginasChapter 4 CompilationRiver RunAún no hay calificaciones
- XDocumento20 páginasXRezi MalikAún no hay calificaciones
- (ENM012 AY22-23) W2 - Trigonometric Functions - D - 2Documento28 páginas(ENM012 AY22-23) W2 - Trigonometric Functions - D - 2Jaxon Riego100% (1)
- Summative Test TrigonometryDocumento3 páginasSummative Test TrigonometryAnabel Sta Cruz67% (3)
- Dinamik & Mechanism BMCG1253 Kinematic of Particles: Rectilinear MotionDocumento2 páginasDinamik & Mechanism BMCG1253 Kinematic of Particles: Rectilinear MotionHui ShanAún no hay calificaciones