También podría gustarte
- Chap 01Documento4 páginasChap 01roahamarerushiAún no hay calificaciones
- Application Form1Documento1 páginaApplication Form1roahamarerushiAún no hay calificaciones
- Driver LicenceDocumento2 páginasDriver LicenceN RakeshAún no hay calificaciones
- Purchase Order Template 01Documento1 páginaPurchase Order Template 01tajudinAún no hay calificaciones
- Student Data XII Sc.-1Documento85 páginasStudent Data XII Sc.-1roahamarerushiAún no hay calificaciones
- Curriculm Vitae: My Self & Career ObjectiveDocumento6 páginasCurriculm Vitae: My Self & Career ObjectiveroahamarerushiAún no hay calificaciones
- Driver LicenceDocumento2 páginasDriver LicenceN RakeshAún no hay calificaciones
- Course File: Subject: Applied Thermodynamics (202050) Name of FacultyDocumento1 páginaCourse File: Subject: Applied Thermodynamics (202050) Name of FacultyroahamarerushiAún no hay calificaciones
- Nilesh Dinkar NagareDocumento2 páginasNilesh Dinkar NagareroahamarerushiAún no hay calificaciones
- Res File 745Documento138 páginasRes File 745Saurabh PatilAún no hay calificaciones
- Curriculm Vitae: My Self & Career ObjectiveDocumento4 páginasCurriculm Vitae: My Self & Career ObjectiveroahamarerushiAún no hay calificaciones
- Mechanical Engineer Cover Letter AjayDocumento2 páginasMechanical Engineer Cover Letter Ajayroahamarerushi100% (1)
- T.e.2012 Course Examinationoct 2014Documento50 páginasT.e.2012 Course Examinationoct 2014roahamarerushiAún no hay calificaciones
- SEmechDocumento6 páginasSEmechroahamarerushiAún no hay calificaciones
- Final Load Without ETCDocumento32 páginasFinal Load Without ETCroahamarerushiAún no hay calificaciones
- Final Load Without ETCDocumento32 páginasFinal Load Without ETCroahamarerushiAún no hay calificaciones
- Sr. No. Date (A) Date (B) Title A 1 A2 A3 B1 B2 B3: Applied Thermodynamics IndexDocumento1 páginaSr. No. Date (A) Date (B) Title A 1 A2 A3 B1 B2 B3: Applied Thermodynamics IndexroahamarerushiAún no hay calificaciones
- MetaDocumento14 páginasMetaroahamarerushiAún no hay calificaciones
- Bill-Format For StudentDocumento1 páginaBill-Format For StudentroahamarerushiAún no hay calificaciones
- Scilab CouponsDocumento2 páginasScilab CouponsroahamarerushiAún no hay calificaciones
- List of Experiments1Documento3 páginasList of Experiments1roahamarerushiAún no hay calificaciones
- Shri Saibaba Institute of Engineering, Research and Allied Sciences, RahataDocumento2 páginasShri Saibaba Institute of Engineering, Research and Allied Sciences, RahataroahamarerushiAún no hay calificaciones
- Crash Course Attendence SheetDocumento2 páginasCrash Course Attendence SheetroahamarerushiAún no hay calificaciones
- List of PracticalsDocumento2 páginasList of PracticalsroahamarerushiAún no hay calificaciones
- Shri Saibaba Institute of Engineering, Research and Allied Sciences, RahataDocumento5 páginasShri Saibaba Institute of Engineering, Research and Allied Sciences, RahataroahamarerushiAún no hay calificaciones
- Crash Course TimetableDocumento1 páginaCrash Course TimetableroahamarerushiAún no hay calificaciones
- Subsequent Allotment Notice Second Round CWEPOIIDocumento1 páginaSubsequent Allotment Notice Second Round CWEPOIIroahamarerushiAún no hay calificaciones
- Department of Mechanical Engineering: Personal Time TableDocumento1 páginaDepartment of Mechanical Engineering: Personal Time TableroahamarerushiAún no hay calificaciones
- Resume: Career ObjectiveDocumento2 páginasResume: Career ObjectiveroahamarerushiAún no hay calificaciones
- T.e.seminar Reg FormDocumento2 páginasT.e.seminar Reg FormroahamarerushiAún no hay calificaciones
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2103)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- A2 Forecourt 06092019Documento22 páginasA2 Forecourt 06092019Zhulqi Pradifa100% (1)
- Animated Hydraulic Circuits: Certification Empowers OpportunityDocumento2 páginasAnimated Hydraulic Circuits: Certification Empowers OpportunityEvelin Isabel Postigo ValdiviaAún no hay calificaciones
- ALPHACVV Business Check GuideDocumento2 páginasALPHACVV Business Check GuideCyberAún no hay calificaciones
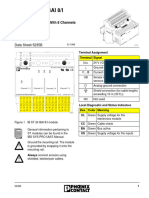
- Ib ST (ZF) 24 Bai 8/I: Analog Input Module With 8 ChannelsDocumento24 páginasIb ST (ZF) 24 Bai 8/I: Analog Input Module With 8 ChannelsJosep Giménez CreixellAún no hay calificaciones
- 8.5-MMD65R Report-Well Ru-473 - Comments by ChenDocumento11 páginas8.5-MMD65R Report-Well Ru-473 - Comments by ChenWHWENAún no hay calificaciones
- Lab Report 4 ZARYAB RAUF FA17-ECE-046Documento17 páginasLab Report 4 ZARYAB RAUF FA17-ECE-046HAMZA ALIAún no hay calificaciones
- ICT-CSS-12 Q1 W2 Mod 4Documento16 páginasICT-CSS-12 Q1 W2 Mod 4AJ Bacarisas RochaAún no hay calificaciones
- Engineering Economic Analysis (Week 7) Comparative Analysis of Alternatives, Repeatability, Coterminated and Capitalized WorthDocumento44 páginasEngineering Economic Analysis (Week 7) Comparative Analysis of Alternatives, Repeatability, Coterminated and Capitalized WorthNaganna ChettyAún no hay calificaciones
- Yesko Code Bata OS Ko Project GarneDocumento17 páginasYesko Code Bata OS Ko Project GarnetheonlygodAún no hay calificaciones
- 1 Dealer AddressDocumento1 página1 Dealer AddressguneshwwarAún no hay calificaciones
- 3012 6087Documento3 páginas3012 6087Shaswata BoseAún no hay calificaciones
- Sony Cdx-gt130, Gt180, Gt230, Gt280, Gt280s, Gt282s Ver-1.0 SMDocumento38 páginasSony Cdx-gt130, Gt180, Gt230, Gt280, Gt280s, Gt282s Ver-1.0 SMAnonymous JIvcJUAún no hay calificaciones
- Piccolo Alternate FingeringsDocumento5 páginasPiccolo Alternate FingeringsCatherine Ryann HirabayashiAún no hay calificaciones
- Python Module 1 NotesDocumento39 páginasPython Module 1 Notessushmitha patilAún no hay calificaciones
- Manually Actuated FL and FLS Gate ValvesDocumento50 páginasManually Actuated FL and FLS Gate ValvesMiguel A. Fernandez100% (8)
- Khalie Bang NSTP QuestionsDocumento3 páginasKhalie Bang NSTP QuestionsLeeAún no hay calificaciones
- Project - Charter1 Template-1Documento5 páginasProject - Charter1 Template-1Jwaone KosiAún no hay calificaciones
- Cholesterol Bk200 BiobaseDocumento2 páginasCholesterol Bk200 BiobaseReactivos Del Valle S.A.SAún no hay calificaciones
- Ticket - MR MHD Anas AlmerstaniDocumento2 páginasTicket - MR MHD Anas AlmerstaniNILSON RANGELAún no hay calificaciones
- The History of The InternetDocumento9 páginasThe History of The InternetMark M. MijaresAún no hay calificaciones
- Interacting With Aws SlidesDocumento24 páginasInteracting With Aws SlidesP. ShinyAún no hay calificaciones
- Instruction Manual: Fusion SplicerDocumento89 páginasInstruction Manual: Fusion SplicerIgor SetasAún no hay calificaciones
- The Application of Cvavr, Avrstudio, Proteus in Mcu TeachingDocumento2 páginasThe Application of Cvavr, Avrstudio, Proteus in Mcu Teachinghusam haiderAún no hay calificaciones
- 2667 SpecDocumento27 páginas2667 SpecanuragpugaliaAún no hay calificaciones
- Couesera Python On OsDocumento3 páginasCouesera Python On OsJashwanth REddyAún no hay calificaciones
- Projet: Telecom Africa Distrubition Expertise Security (Tades)Documento8 páginasProjet: Telecom Africa Distrubition Expertise Security (Tades)Maimouna NdiayeAún no hay calificaciones
- Unit 6: Editing Text in Word 2013Documento7 páginasUnit 6: Editing Text in Word 2013Raeesa ShoaibAún no hay calificaciones
- Oracle 1Z0-071 Updated Page 1Documento3 páginasOracle 1Z0-071 Updated Page 1AljuanAún no hay calificaciones
- Chapter 2 The System Unit, Processing, and MemoryDocumento2 páginasChapter 2 The System Unit, Processing, and MemoryJayson BadilloAún no hay calificaciones
- Verificacion de Presiones de Tren Depotencia d6hDocumento21 páginasVerificacion de Presiones de Tren Depotencia d6hJuan Amanqui Garcia100% (2)