También podría gustarte
- David Frawley - How I Became A HinduDocumento319 páginasDavid Frawley - How I Became A Hindufoxtrot23393% (14)
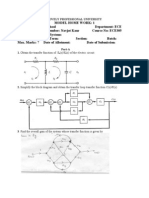
- LPU Model Homework Control SystemsDocumento3 páginasLPU Model Homework Control SystemsanujdandonaAún no hay calificaciones
- Propagation Vol.4 No.2 2013 Vol.5 No.1 2014Documento109 páginasPropagation Vol.4 No.2 2013 Vol.5 No.1 2014anujdandonaAún no hay calificaciones
- Reference Books 1Documento110 páginasReference Books 1anujdandonaAún no hay calificaciones
- ReadmeDocumento1 páginaReadmeanujdandonaAún no hay calificaciones
- Control System Term PaperDocumento4 páginasControl System Term PaperanujdandonaAún no hay calificaciones
- DM PDFDocumento27 páginasDM PDFAkshay JindalAún no hay calificaciones
- Lovely Professional University, Punjab: Course No Cours Title Course Planner Lectures Tutorial Practical CreditsDocumento6 páginasLovely Professional University, Punjab: Course No Cours Title Course Planner Lectures Tutorial Practical CreditsanujdandonaAún no hay calificaciones
- State Variable AnalysisDocumento28 páginasState Variable Analysis96chandrahasAún no hay calificaciones
- Multi Agent SystemDocumento20 páginasMulti Agent Systemanujdandona100% (1)
- GPS EXPLAINED: A GUIDE TO THE GLOBAL POSITIONING SYSTEMDocumento27 páginasGPS EXPLAINED: A GUIDE TO THE GLOBAL POSITIONING SYSTEManujdandonaAún no hay calificaciones
- 10 Things They Never Tell UDocumento24 páginas10 Things They Never Tell UMAR9Aún no hay calificaciones
- TrainsDocumento11 páginasTrainsanujdandonaAún no hay calificaciones
- Satellite Communication: Anuj DandonaDocumento22 páginasSatellite Communication: Anuj DandonaanujdandonaAún no hay calificaciones
- LangtonDocumento1 páginaLangtonanujdandonaAún no hay calificaciones
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Lesson Plan 160205 Jelly Snake PracticalDocumento7 páginasLesson Plan 160205 Jelly Snake Practicalapi-309206763Aún no hay calificaciones
- Upper Six 2013 STPM Physics 2 Trial ExamDocumento11 páginasUpper Six 2013 STPM Physics 2 Trial ExamOw Yu Zen100% (2)
- VV016042 Service Manual OS4 PDFDocumento141 páginasVV016042 Service Manual OS4 PDFCamilo Andres Uribe Lopez100% (1)
- 2017 Grade 9 Math Challenge OralsDocumento3 páginas2017 Grade 9 Math Challenge OralsGracy Mae PanganibanAún no hay calificaciones
- On MCH and Maternal Health in BangladeshDocumento46 páginasOn MCH and Maternal Health in BangladeshTanni ChowdhuryAún no hay calificaciones
- RCC Lintel and Slab PlanDocumento3 páginasRCC Lintel and Slab PlanSaurabh Parmar 28Aún no hay calificaciones
- Cbydp Draft SK BaracbacDocumento13 páginasCbydp Draft SK BaracbacLikey PromiseAún no hay calificaciones
- Flow Through Pipes: Departmentofcivilengineering Presidency University, Bangalore-64 BY Santhosh M B Asstistant ProfessorDocumento15 páginasFlow Through Pipes: Departmentofcivilengineering Presidency University, Bangalore-64 BY Santhosh M B Asstistant ProfessorSanthoshMBSanthuAún no hay calificaciones
- College Physics Reasoning and Relationships 2nd Edition Nicholas Giordano Solutions ManualDocumento36 páginasCollege Physics Reasoning and Relationships 2nd Edition Nicholas Giordano Solutions Manualshippo.mackerels072100% (22)
- Estimating PSCC for Electrical InstallationsDocumento2 páginasEstimating PSCC for Electrical InstallationsgmuitaAún no hay calificaciones
- Provisional List of Institutes1652433727Documento27 páginasProvisional List of Institutes1652433727qwerty qwertyAún no hay calificaciones
- Good Evil EssayDocumento2 páginasGood Evil EssayuniquebythemillionsAún no hay calificaciones
- Curriculum Vitae: Name: Bhupal Shrestha Address: Kamalamai Municipality-12, Sindhuli, Nepal. Email: ObjectiveDocumento1 páginaCurriculum Vitae: Name: Bhupal Shrestha Address: Kamalamai Municipality-12, Sindhuli, Nepal. Email: Objectivebhupal shresthaAún no hay calificaciones
- Cambridge IGCSE: 0450/11 Business StudiesDocumento12 páginasCambridge IGCSE: 0450/11 Business StudiesGodfreyFrankMwakalingaAún no hay calificaciones
- Facelift at Your Fingertips - An Aromatherapy Massage Program For Healthy Skin and A Younger FaceDocumento136 páginasFacelift at Your Fingertips - An Aromatherapy Massage Program For Healthy Skin and A Younger Faceugur gebologluAún no hay calificaciones
- UNDERSTANDING CULTURE SOCIETY & POLITICS12 - LAS - Week7Documento6 páginasUNDERSTANDING CULTURE SOCIETY & POLITICS12 - LAS - Week7Bergonsolutions AingelAún no hay calificaciones
- Theravada BuddhismDocumento21 páginasTheravada BuddhismClarence John G. BelzaAún no hay calificaciones
- Case Study On Global Branding - DuluxDocumento18 páginasCase Study On Global Branding - DuluxAakriti NegiAún no hay calificaciones
- Lecturer No 1 - Transformer BasicDocumento1 páginaLecturer No 1 - Transformer Basiclvb123Aún no hay calificaciones
- Purnanandalahari p3D4Documento60 páginasPurnanandalahari p3D4anilkumar100% (1)
- Harajuku: Rebels On The BridgeDocumento31 páginasHarajuku: Rebels On The BridgeChristian Perry100% (41)
- Test 1 Grammar, Revised Ecpe HonorsDocumento3 páginasTest 1 Grammar, Revised Ecpe HonorsAnna Chronopoulou100% (1)
- VIACRYL VSC 6250w/65MP: Technical DatasheetDocumento2 páginasVIACRYL VSC 6250w/65MP: Technical DatasheetPratik MehtaAún no hay calificaciones
- 4439 Chap01Documento28 páginas4439 Chap01bouthaina otAún no hay calificaciones
- MRP Format MbaDocumento6 páginasMRP Format Mbasankshep panchalAún no hay calificaciones
- ARTS 9 Q4 Week 1Documento3 páginasARTS 9 Q4 Week 1Elaissa MaglanqueAún no hay calificaciones
- Diwali - An Overview of The Festival of LightsDocumento3 páginasDiwali - An Overview of The Festival of LightsSumeetAún no hay calificaciones
- GooglepreviewDocumento69 páginasGooglepreviewtarunchatAún no hay calificaciones
- Automorphic Representations and L-Functions For The General Linear Group - Volume 2cDocumento210 páginasAutomorphic Representations and L-Functions For The General Linear Group - Volume 2cluisufspaiandreAún no hay calificaciones
- Unit 5 Vocabulary Basic 1 Match 1-10 With A-J To Make Innovations and InventionsDocumento6 páginasUnit 5 Vocabulary Basic 1 Match 1-10 With A-J To Make Innovations and InventionsCristina Garcia50% (2)