También podría gustarte
- Sujet VeloDocumento10 páginasSujet VeloKhaled SouaissaAún no hay calificaciones
- SujetDocumento28 páginasSujetbargo90Aún no hay calificaciones
- Exercice: Les Nombres AmisDocumento12 páginasExercice: Les Nombres AmisMIMOUNIAún no hay calificaciones
- CINEMATIQUE GRAPHIQUE Preparation 214 PDFDocumento10 páginasCINEMATIQUE GRAPHIQUE Preparation 214 PDFYoussef RachidAún no hay calificaciones
- TD 11 - Cinématique Graphique - Composition Des Vecteurs VitessesDocumento4 páginasTD 11 - Cinématique Graphique - Composition Des Vecteurs Vitessesmouly100% (1)
- TD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocumento6 páginasTD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationibrahim rabbajAún no hay calificaciones
- TD 1Documento4 páginasTD 1Jeremie Ivann NGOYEAún no hay calificaciones
- Si MP 2022Documento16 páginasSi MP 2022NguyenAún no hay calificaciones
- Ex 15 16Documento18 páginasEx 15 16Sd instruAún no hay calificaciones
- Cours Electronique ESTC Chapitre 5Documento23 páginasCours Electronique ESTC Chapitre 5Mohamed Amine TouatiAún no hay calificaciones
- Corrrect Cnc10 PH1 TSIDocumento6 páginasCorrrect Cnc10 PH1 TSIzazazaz2000Aún no hay calificaciones
- CCP Tsi Si 2016eDocumento30 páginasCCP Tsi Si 2016ekamalAún no hay calificaciones
- Tipe Mcot 2023Documento4 páginasTipe Mcot 2023Nz 'Aún no hay calificaciones
- Corrige IMN 01.1Documento14 páginasCorrige IMN 01.1Nowe AhmadeAún no hay calificaciones
- TD 1 EngreanagesDocumento3 páginasTD 1 EngreanagesAbdellah FaqdaniAún no hay calificaciones
- TDDocumento14 páginasTDYassir Ez-znafryAún no hay calificaciones
- TD Les Actions MécaniqueDocumento18 páginasTD Les Actions MécaniqueMAJDA TAHIRIAún no hay calificaciones
- Vis EcrouDocumento8 páginasVis EcrouAsma MoussaAún no hay calificaciones
- TD 01Documento4 páginasTD 01Asmaa KasmiAún no hay calificaciones
- Prob 21402Documento8 páginasProb 21402Ayoüb Sou UadAún no hay calificaciones
- CCP DEUG 2003 - Thermodynamique - Electro - OptiqueDocumento13 páginasCCP DEUG 2003 - Thermodynamique - Electro - OptiqueYahya ElamraniAún no hay calificaciones
- TD3 CinematiqueDocumento4 páginasTD3 Cinematiqueimenrds0% (1)
- (Cin) (TD) Robot de Soudure PDFDocumento3 páginas(Cin) (TD) Robot de Soudure PDFMario Di CramineAún no hay calificaciones
- DM02 SujetDocumento22 páginasDM02 SujetSami BennourAún no hay calificaciones
- Referentiel Non GaliléenDocumento24 páginasReferentiel Non GaliléenVictor B.Aún no hay calificaciones
- TD Flexion Groupe ADocumento2 páginasTD Flexion Groupe Aerzrzretgertfertge100% (1)
- TipeDocumento1 páginaTipeaissa agoujilAún no hay calificaciones
- 01 Exercice EngrenageDocumento4 páginas01 Exercice EngrenageEl Hâfÿîdÿî KamelAún no hay calificaciones
- Cours MPSI-IPTDocumento185 páginasCours MPSI-IPTCéline LuttiAún no hay calificaciones
- Transmission de Puissance Avec Transformation de MouvementDocumento19 páginasTransmission de Puissance Avec Transformation de MouvementPhil ČhrýstaĺAún no hay calificaciones
- CCP Tsi 2018 Physique Chimie CorrigeDocumento13 páginasCCP Tsi 2018 Physique Chimie CorrigeIsmAil EneGadiAún no hay calificaciones
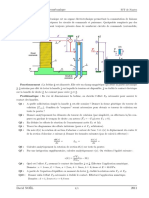
- David NOËL - TD de RDM - Relais ÉlectromagnétiqueDocumento1 páginaDavid NOËL - TD de RDM - Relais ÉlectromagnétiqueCesaire DanAún no hay calificaciones
- Devoir RégulationDocumento1 páginaDevoir RégulationAshraf TrescaAún no hay calificaciones
- Grue Portuaire - CorrectionDocumento13 páginasGrue Portuaire - CorrectionKOUADIO PATRICEAún no hay calificaciones
- CHIM105BS1DS20405Documento2 páginasCHIM105BS1DS20405tv tvAún no hay calificaciones
- PhA ESA 2018Documento8 páginasPhA ESA 2018othmane mrichAún no hay calificaciones
- Exercice 4 Banc Pneumatique A1Documento2 páginasExercice 4 Banc Pneumatique A1Mohamed Amine FaidiAún no hay calificaciones
- Cours Sur Les StructuresDocumento29 páginasCours Sur Les Structuresapi-302372012Aún no hay calificaciones
- Electronique-ANALOGIQUE Modi enDocumento99 páginasElectronique-ANALOGIQUE Modi enHAMZAAún no hay calificaciones
- CNC 2009 Physique-1 TSI CorrectionDocumento9 páginasCNC 2009 Physique-1 TSI CorrectionAya MANYANIAún no hay calificaciones
- Optimisation de La Collecte Des Déchets (Poubelle Connectée)Documento34 páginasOptimisation de La Collecte Des Déchets (Poubelle Connectée)Siham SlimaniAún no hay calificaciones
- RAPPORT TP PICos18 G6 LASRI OULAASRIDocumento28 páginasRAPPORT TP PICos18 G6 LASRI OULAASRIYassine OULAASRIAún no hay calificaciones
- 2004 Reunion Sujet Exo2 QROC Electrolyse 3ptsDocumento2 páginas2004 Reunion Sujet Exo2 QROC Electrolyse 3ptsdjoudi mourad100% (1)
- CI02 TD03 Sujet - Interpréter Un Schéma CinématiqueDocumento3 páginasCI02 TD03 Sujet - Interpréter Un Schéma CinématiqueKhaled JberiAún no hay calificaciones
- Devoir 1esaDocumento6 páginasDevoir 1esasb aliAún no hay calificaciones
- Chapitre 4 EngrenagesDroitsDocumento20 páginasChapitre 4 EngrenagesDroitsKaram QaoubAún no hay calificaciones
- EngrenageDocumento18 páginasEngrenageMohamed El HajjamAún no hay calificaciones
- Exos CH 15Documento2 páginasExos CH 15lol testAún no hay calificaciones
- TD132 CorrectionDocumento6 páginasTD132 CorrectionTalel MissaouiAún no hay calificaciones
- Chaîne en Mouvement Sur Le Bord D'une Table)Documento3 páginasChaîne en Mouvement Sur Le Bord D'une Table)Kamel KamatchoAún no hay calificaciones
- DS1 Mécanique 2016-2017Documento3 páginasDS1 Mécanique 2016-2017ssèf yøuAún no hay calificaciones
- Cours Résumé Sur Les Timers Du PIC (PIC18F252 Et Autres)Documento9 páginasCours Résumé Sur Les Timers Du PIC (PIC18F252 Et Autres)barbareAún no hay calificaciones
- Cinematique Des Fluides Exercices - Compress PDFDocumento2 páginasCinematique Des Fluides Exercices - Compress PDFRenaud NsiepingAún no hay calificaciones
- TRAVAUX DIRIGES N°1 Réaction Acido-BasiqueDocumento3 páginasTRAVAUX DIRIGES N°1 Réaction Acido-BasiqueAlex N'zue100% (1)
- Statique Forces Et MomentsDocumento10 páginasStatique Forces Et MomentsPaul EssongAún no hay calificaciones
- Classiques en InformatiqueDocumento2 páginasClassiques en InformatiqueElkarni SoumayaAún no hay calificaciones
- Variateur TDDocumento4 páginasVariateur TDmecaniquesti100% (1)
- CAM - Rappel Sur Les Liaisons Mécaniques 1Documento20 páginasCAM - Rappel Sur Les Liaisons Mécaniques 1Moslem ZariatAún no hay calificaciones
- 3 - DC N°1 2019 - 2020 (Trottinette Electrique)Documento6 páginas3 - DC N°1 2019 - 2020 (Trottinette Electrique)Elafif Hamdi100% (1)
- Chapitre IIIDocumento16 páginasChapitre IIIAbdalah Cheick OuedraogoAún no hay calificaciones
- MID 130 Unité de Commande TransmissionDocumento5 páginasMID 130 Unité de Commande TransmissionAbdelhakAún no hay calificaciones
- TC1 Chapitre 3 Echangeur de Chaleur TubulaireDocumento18 páginasTC1 Chapitre 3 Echangeur de Chaleur TubulairebrandonAún no hay calificaciones
- Maintiens Au DeversementDocumento3 páginasMaintiens Au DeversementAbdel Autoroute du KiffAún no hay calificaciones
- Manual Partes D6RDocumento853 páginasManual Partes D6RLuis CornejoAún no hay calificaciones
- Présentation Cours Alimenter TCTDocumento45 páginasPrésentation Cours Alimenter TCTLhadi IbnziatenAún no hay calificaciones
- 2M Trait PSPDocumento6 páginas2M Trait PSPfazfrito lacaviataAún no hay calificaciones
- DT Ge 110kvaDocumento17 páginasDT Ge 110kvaSarah FithaneAún no hay calificaciones
- Cac - PMDocumento3 páginasCac - PMHamza KHAún no hay calificaciones
- C.M. 2Documento36 páginasC.M. 2hdoi91775Aún no hay calificaciones
- Fiche Camion Howo 5T 8TDocumento4 páginasFiche Camion Howo 5T 8TCheikh Ahmed KOITAAún no hay calificaciones
- Cours de PhysiqueDocumento8 páginasCours de PhysiqueFERICHEAún no hay calificaciones
- PR - Compact 8w - Compact 2047e - Compact 12 - Compact 3347e - E02.15Documento317 páginasPR - Compact 8w - Compact 2047e - Compact 12 - Compact 3347e - E02.15SARAMQR100% (1)
- A Savoir EnergetiqueDocumento3 páginasA Savoir EnergetiqueemyazAún no hay calificaciones
- Classe Tle F2 Programme en Relecture ADONGDocumento62 páginasClasse Tle F2 Programme en Relecture ADONGRefrain Petoh moufoAún no hay calificaciones
- E) 03 Principe de Base Théorique de La Climatisation FDocumento4 páginasE) 03 Principe de Base Théorique de La Climatisation FFilipe CorreiaAún no hay calificaciones
- Td1 Acm AutoDocumento5 páginasTd1 Acm AutoMoussa YhAún no hay calificaciones
- Caracteristique Des MoteursDocumento5 páginasCaracteristique Des MoteursYacouba OuedraogoAún no hay calificaciones
- Chapitre 1.2Documento37 páginasChapitre 1.2hamzaAún no hay calificaciones
- Cogénération - TS JMS620 CARTHAGE GRAIN Ver02 PDFDocumento36 páginasCogénération - TS JMS620 CARTHAGE GRAIN Ver02 PDFlasmarAún no hay calificaciones
- L05 PHR004 2010 PDFDocumento22 páginasL05 PHR004 2010 PDFMarwane OuadadAún no hay calificaciones
- Cours CVC - Chapitre 2Documento28 páginasCours CVC - Chapitre 2Youssef YakoubiAún no hay calificaciones
- Master2 - DFE - 04 - Dynamique Des GazDocumento28 páginasMaster2 - DFE - 04 - Dynamique Des GazTriki BilelAún no hay calificaciones
- Maintenance Et Réparation Des Equipements D'ExtrusionDocumento9 páginasMaintenance Et Réparation Des Equipements D'Extrusiondjamila alfadis100% (1)
- Chrysler Jeep A500 40RH 42RH 42RE 44REDocumento14 páginasChrysler Jeep A500 40RH 42RH 42RE 44REBruno MOSZKOWSKIAún no hay calificaciones
- Cour Techno TransmissionsDocumento4 páginasCour Techno TransmissionsMakrem Cherif100% (1)
- Liste Des Symboles Énergétiques 1Documento3 páginasListe Des Symboles Énergétiques 1Topina Rahim100% (1)
- Chemin de Roulement Courigé Mrs MeridaDocumento26 páginasChemin de Roulement Courigé Mrs MeridaHamza Halhouli100% (1)
- Cor Exam16octDocumento4 páginasCor Exam16octdsiscnAún no hay calificaciones