También podría gustarte
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5795)
- State of Old MataramDocumento40 páginasState of Old MataramIwan SuryolaksonoAún no hay calificaciones
- Tentang KometDocumento1 páginaTentang KometIwan SuryolaksonoAún no hay calificaciones
- The Queen of ShebaDocumento6 páginasThe Queen of ShebaIwan SuryolaksonoAún no hay calificaciones
- Seminar Abdul Qadir BedilDocumento3 páginasSeminar Abdul Qadir BedilIwan Suryolaksono100% (1)
- Merek RefrigeratorDocumento1 páginaMerek RefrigeratorIwan SuryolaksonoAún no hay calificaciones
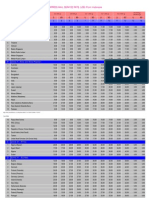
- Express Mail Service Rate (Us$) From Indonesia: No Country of DestinationDocumento4 páginasExpress Mail Service Rate (Us$) From Indonesia: No Country of DestinationIwan SuryolaksonoAún no hay calificaciones
- Harga Emas Di IndonesiaDocumento1 páginaHarga Emas Di IndonesiaIwan SuryolaksonoAún no hay calificaciones
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (121)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2104)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- Chapter 2 Fiber Optics A Brief History of Fiber Optics Lesson 4Documento5 páginasChapter 2 Fiber Optics A Brief History of Fiber Optics Lesson 4elevitas2016Aún no hay calificaciones
- RTD9420 0003 121 1120Documento3 páginasRTD9420 0003 121 1120Faustino CañapatañaAún no hay calificaciones
- Mechatronics 2.3Documento2 páginasMechatronics 2.3Rohan YadavAún no hay calificaciones
- SPM Physics Summative Test 2 - Form 5 Chapter 2 and 3Documento8 páginasSPM Physics Summative Test 2 - Form 5 Chapter 2 and 3Winnie Lim Li Sze0% (1)
- Fujitsu Air Conditioner Service ManualDocumento22 páginasFujitsu Air Conditioner Service Manualnovy100% (1)
- Topik 5 - Introduction To Other Semiconductor ComponentsDocumento27 páginasTopik 5 - Introduction To Other Semiconductor ComponentsfaizahAún no hay calificaciones
- Stack Project Report On Smoke Detector - Ilovepdf-CompressedDocumento36 páginasStack Project Report On Smoke Detector - Ilovepdf-CompressedSanthosh Kumar H O50% (6)
- Weighbeam DWB40-200 TDocumento4 páginasWeighbeam DWB40-200 TdassoumennAún no hay calificaciones
- 303 Med PDFDocumento50 páginas303 Med PDFZalatiel Mecott ArandaAún no hay calificaciones
- AMSAT Eagle - 70 CM Receiver Circuit DescriptionDocumento9 páginasAMSAT Eagle - 70 CM Receiver Circuit Descriptionettore68Aún no hay calificaciones
- Trasistor Mosfet Placa MotorDocumento9 páginasTrasistor Mosfet Placa MotorDemóstenes Moraes OlintoAún no hay calificaciones
- Permanent Magnet MotorDocumento2 páginasPermanent Magnet Motorahmed sanirAún no hay calificaciones
- Panasonic Th-42pz85u CH Gpf11du PDFDocumento126 páginasPanasonic Th-42pz85u CH Gpf11du PDFRadu BriaAún no hay calificaciones
- RR-65B-R2: General SpecificationsDocumento4 páginasRR-65B-R2: General SpecificationsyasirAún no hay calificaciones
- 2nd Electrical Machines 1Documento2 páginas2nd Electrical Machines 1KakaoxAún no hay calificaciones
- Insem 1 - PE - Handbook - 2023Documento3 páginasInsem 1 - PE - Handbook - 2023Ananya VAún no hay calificaciones
- Eaton 066167 Emt6 DB en GBDocumento5 páginasEaton 066167 Emt6 DB en GBDejanAún no hay calificaciones
- Controladores Crompton GreavesDocumento16 páginasControladores Crompton GreavesoeovcAún no hay calificaciones
- Analysis of Leak and Water Absorption Test Results For Water-Cooled Generator Stator WindingsDocumento6 páginasAnalysis of Leak and Water Absorption Test Results For Water-Cooled Generator Stator WindingsHeryanto SyamAún no hay calificaciones
- Ch-11 Electricity and MagDocumento56 páginasCh-11 Electricity and MagTakkee BireeAún no hay calificaciones
- Troubleshooting For Rb711Ga-5Hnd and Rb711G-5Hnd: Routerboard Does Not Powered UpDocumento12 páginasTroubleshooting For Rb711Ga-5Hnd and Rb711G-5Hnd: Routerboard Does Not Powered UpIdeal soluções em segurança e tecnológiaAún no hay calificaciones
- Operators Manual AND Installation and Service Manual: 8000-3488 Universal Uni-Matic 325D Generator MODEL NO. 3488/3550Documento38 páginasOperators Manual AND Installation and Service Manual: 8000-3488 Universal Uni-Matic 325D Generator MODEL NO. 3488/3550Henry Sánchez EstradaAún no hay calificaciones
- Ho Hsing Manual EnglishDocumento4 páginasHo Hsing Manual EnglishvictorhpaAún no hay calificaciones
- Troubleshooting: Troubleshooting The 604 (41TE) The 604 (41TE)Documento4 páginasTroubleshooting: Troubleshooting The 604 (41TE) The 604 (41TE)Autof FerreiraAún no hay calificaciones
- Chemistry-Independent Battery Chargers: - General Description - FeaturesDocumento24 páginasChemistry-Independent Battery Chargers: - General Description - FeaturesJie99Aún no hay calificaciones
- Manual Lenovo G555Documento92 páginasManual Lenovo G555vukas24Aún no hay calificaciones
- KAS101T Phy AKTU 5yearDocumento8 páginasKAS101T Phy AKTU 5yearDevansh BansalAún no hay calificaciones
- Teori TheveninDocumento6 páginasTeori TheveninAwa StelkAún no hay calificaciones
- Surface Chemistry and ElectroplatingDocumento33 páginasSurface Chemistry and ElectroplatingAhmed ImranAún no hay calificaciones