También podría gustarte
- Tesis 60%Documento44 páginasTesis 60%Alexander Alex VP50% (2)
- Circuitos RCDocumento4 páginasCircuitos RCapi-3826879100% (2)
- Práctica de Carga y Descarga de Un CondensadorDocumento5 páginasPráctica de Carga y Descarga de Un CondensadorMario Martin CerezoAún no hay calificaciones
- Informe L6 CondensadoresDocumento14 páginasInforme L6 CondensadoresCamilo Rios PAún no hay calificaciones
- Lab 1 PotenciaDocumento7 páginasLab 1 PotenciaHernando NegreteAún no hay calificaciones
- Circuit RC y Fuentes ReguladasDocumento13 páginasCircuit RC y Fuentes ReguladasAntonio HenaoAún no hay calificaciones
- Laboratorio Numero 3 de Fisica III 2Documento7 páginasLaboratorio Numero 3 de Fisica III 2HugoAún no hay calificaciones
- Lab 6 Grupo 1Documento8 páginasLab 6 Grupo 1Diiego FernandoAún no hay calificaciones
- Wuolah Free PRACTICA 7 CARGA Y DESCARGADocumento14 páginasWuolah Free PRACTICA 7 CARGA Y DESCARGAAngie eAún no hay calificaciones
- Práctica 7 Carga y DescargaDocumento14 páginasPráctica 7 Carga y DescargaJOSE carmonaAún no hay calificaciones
- Carga y Descarga de Un CondensadorDocumento11 páginasCarga y Descarga de Un CondensadorTahic PAún no hay calificaciones
- Circuito RCDocumento9 páginasCircuito RCFabiola VenegasAún no hay calificaciones
- Ensayo de MotoresDocumento32 páginasEnsayo de MotoresKonami ZhyperAún no hay calificaciones
- Laboratorio Numero 3 de Fisica IIIDocumento6 páginasLaboratorio Numero 3 de Fisica IIIHugoAún no hay calificaciones
- Circuito RCDocumento15 páginasCircuito RCsasuke 214Aún no hay calificaciones
- Circuito R-CDocumento15 páginasCircuito R-CMiriam PaezAún no hay calificaciones
- Potencia 2Documento10 páginasPotencia 2laura esferaAún no hay calificaciones
- Carga y Descarga de Un CapacitadorDocumento7 páginasCarga y Descarga de Un CapacitadorSaray CubasAún no hay calificaciones
- Carga y Descarga de Un CondensadorDocumento7 páginasCarga y Descarga de Un CondensadorLeslie RamirezAún no hay calificaciones
- Maquinas 2-4Documento40 páginasMaquinas 2-4milner12Aún no hay calificaciones
- 01 - Clase Especificación de Motores Eléctricos RE01Documento37 páginas01 - Clase Especificación de Motores Eléctricos RE01Diego CristaldoAún no hay calificaciones
- Carga y Descarga de Un Condensador 2017Documento9 páginasCarga y Descarga de Un Condensador 2017Leonardo Romero0% (2)
- Tercer Laboratorio (Motor Daihatsu)Documento10 páginasTercer Laboratorio (Motor Daihatsu)Jorg Meza ParionaAún no hay calificaciones
- Curso Turbomáquinas I 2018-1 SGCH (Semana 4 A 8)Documento28 páginasCurso Turbomáquinas I 2018-1 SGCH (Semana 4 A 8)wasere2014Aún no hay calificaciones
- Tarea de La Carga y Descarga de Un CapacitorDocumento4 páginasTarea de La Carga y Descarga de Un CapacitorMaria Juliana Arenas JimenezAún no hay calificaciones
- Proceso Experimental de Carga y Descarga de Un CondensadorDocumento8 páginasProceso Experimental de Carga y Descarga de Un CondensadorCamilo SandovalAún no hay calificaciones
- CARGA Y DESCARGA DE UN CONDENSADOR #11 TerminadoDocumento14 páginasCARGA Y DESCARGA DE UN CONDENSADOR #11 Terminadoluis splashAún no hay calificaciones
- 012-P12-Carga de Un Capacitor (Pags 27-36)Documento11 páginas012-P12-Carga de Un Capacitor (Pags 27-36)Cristhian Sanchez PichenAún no hay calificaciones
- Guion 1 PDFDocumento8 páginasGuion 1 PDFMiguelAngelFerreteOrtegaAún no hay calificaciones
- Circuito RC, Informe 3Documento9 páginasCircuito RC, Informe 3Duncan McAún no hay calificaciones
- Relajacion Exponencial Carga y Descarga de Un Capacitor PDFDocumento6 páginasRelajacion Exponencial Carga y Descarga de Un Capacitor PDFBrian Aguirre LennisAún no hay calificaciones
- Control Motor CDDocumento3 páginasControl Motor CDPacheco ÁngelAún no hay calificaciones
- TP Nº6 - Cadenas TransportadorasDocumento4 páginasTP Nº6 - Cadenas TransportadorasRaush José AlbertoAún no hay calificaciones
- Clase 2Documento15 páginasClase 2CristoferAún no hay calificaciones
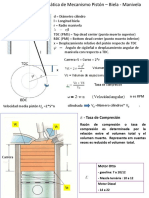
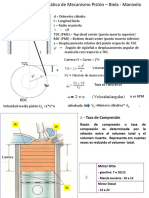
- Cinemática Motores PDFDocumento15 páginasCinemática Motores PDFIgnacio MoragaAún no hay calificaciones
- Clase 2Documento15 páginasClase 2CristoferAún no hay calificaciones
- Circuito RCDocumento17 páginasCircuito RCwilmarAún no hay calificaciones
- 4 Descarga de Un CondensadorDocumento2 páginas4 Descarga de Un CondensadorJunny CeronAún no hay calificaciones
- Curva de Carga de Los CapacitoresDocumento6 páginasCurva de Carga de Los CapacitoresRicardo Velasco BraggartAún no hay calificaciones
- Resistencia Del BuqueDocumento9 páginasResistencia Del BuqueFernando Cevallos TenorioAún no hay calificaciones
- Generador SincronoDocumento4 páginasGenerador SincronoLuis LaymeAún no hay calificaciones
- Circuitos RCDocumento11 páginasCircuitos RCnarimon456Aún no hay calificaciones
- Circuito RCDocumento13 páginasCircuito RCDaniel DuranAún no hay calificaciones
- CálculosDocumento9 páginasCálculosDANNY KELVER VARGAS INGAAún no hay calificaciones
- Informe 8. Circuito RCDocumento4 páginasInforme 8. Circuito RCShirley AndreaAún no hay calificaciones
- Circuito RC 3Documento6 páginasCircuito RC 3Andres AldanaAún no hay calificaciones
- 2 CapacitanciaDocumento10 páginas2 CapacitanciaMauricio Montaño SaavedraAún no hay calificaciones
- Practica Numero 5Documento6 páginasPractica Numero 5MANUELAún no hay calificaciones
- Rendimiento PropulsivoDocumento8 páginasRendimiento PropulsivoJuniorRodriguez0% (1)
- 2 - Carga y Descarga de Un CondensadorDocumento7 páginas2 - Carga y Descarga de Un Condensadormar.buenoceAún no hay calificaciones
- FERROBUSDocumento22 páginasFERROBUSAlejandro Quinteros CabreraAún no hay calificaciones
- Circuito RCDocumento12 páginasCircuito RCcesar augusto Sierra FlorezAún no hay calificaciones
- Informe de Laboratorio N 4Documento23 páginasInforme de Laboratorio N 4Estif Emerson Landeo LliuyaAún no hay calificaciones
- Version 12 RESISTENCIA Y PROPULSIËN 3Documento134 páginasVersion 12 RESISTENCIA Y PROPULSIËN 3massacre30Aún no hay calificaciones
- Carga y Descarga de Un CapacitorDocumento11 páginasCarga y Descarga de Un CapacitorvictorAún no hay calificaciones
- Pre Informe Carga y Descarga de Un CondensadorDocumento7 páginasPre Informe Carga y Descarga de Un Condensadororiana peñaranda lopezAún no hay calificaciones
- Modelo Educativo de La UnahDocumento12 páginasModelo Educativo de La UnahahawAún no hay calificaciones
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaDe EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaAún no hay calificaciones
- Power CemDocumento7 páginasPower CemDanny Pallo100% (1)
- AntologíaDocumento359 páginasAntologíaAzulita KarreraAún no hay calificaciones
- Actividad 2ppjbDocumento7 páginasActividad 2ppjbsamuel castañedaAún no hay calificaciones
- Ficha Tecnica T832150UL Nominal Rev1703Documento2 páginasFicha Tecnica T832150UL Nominal Rev1703Omar QuisbertAún no hay calificaciones
- B - Especialización en SQLDocumento19 páginasB - Especialización en SQLleo rojasAún no hay calificaciones
- Ejercicio U2 CédulasDocumento2 páginasEjercicio U2 CédulasRAMONAAún no hay calificaciones
- 03 Vivienda Adulto Mayor - Arquitectura Detalle de Zocalos, Zanjas y Otros D-01 D-02-D-01Documento1 página03 Vivienda Adulto Mayor - Arquitectura Detalle de Zocalos, Zanjas y Otros D-01 D-02-D-01Ernest Venaver0% (1)
- Ejercicio Motores Electricos Software RETScreenDocumento6 páginasEjercicio Motores Electricos Software RETScreenSandra Milena Téllez GutiérrezAún no hay calificaciones
- AVANSE GUIA ORDEN - Recuperacion MejoradaDocumento3 páginasAVANSE GUIA ORDEN - Recuperacion MejoradaGonzalo vargasAún no hay calificaciones
- 3ER Jueves AACE - Santiago Ramirez PDFDocumento27 páginas3ER Jueves AACE - Santiago Ramirez PDFLuis PrietoAún no hay calificaciones
- Práctica 6Documento2 páginasPráctica 6XavierZITAún no hay calificaciones
- Ecuaciones Cuadráticas Utilizando Fórmula General PDFDocumento5 páginasEcuaciones Cuadráticas Utilizando Fórmula General PDFElimar GallegosAún no hay calificaciones
- 4º Sesion 2 CCSS SecDocumento5 páginas4º Sesion 2 CCSS Secnuestra señora del rosarioAún no hay calificaciones
- Guía de Estudio para El Examen de Admisión en Línea Tec Linares.v3Documento40 páginasGuía de Estudio para El Examen de Admisión en Línea Tec Linares.v3Yeni MondragonAún no hay calificaciones
- CV Liseht Garcez GodoyDocumento2 páginasCV Liseht Garcez GodoybbenitezAún no hay calificaciones
- Convertido1 FusionadoDocumento15 páginasConvertido1 FusionadoDante Fernando HormigoAún no hay calificaciones
- Guias de Trabajo AlgebraDocumento3 páginasGuias de Trabajo AlgebraAndrés RodríguezAún no hay calificaciones
- Estacion DXXXXXDocumento8 páginasEstacion DXXXXXCARLOSAún no hay calificaciones
- Iso 1012Documento85 páginasIso 1012RuthAún no hay calificaciones
- Nave Estructural de ZarandaDocumento10 páginasNave Estructural de ZarandaDaniel Herrera QuintoAún no hay calificaciones
- Sistemas de Información para EjecutivosDocumento16 páginasSistemas de Información para EjecutivosMaritza BenavidesAún no hay calificaciones
- Inf. Control de Calidad Julio 2021Documento19 páginasInf. Control de Calidad Julio 2021Nestor Daniel Flores SajamiAún no hay calificaciones
- Acuerdo Morroa EotDocumento184 páginasAcuerdo Morroa EotAndres Lopez0% (1)
- Unidad 4 Procesos Y Administración Del ProcesadorDocumento12 páginasUnidad 4 Procesos Y Administración Del ProcesadorLuis Eliecer EscorciaAún no hay calificaciones
- Mii515 s2 Entregable PDF Planificación de Recursos Empresariales Computación en La NubeDocumento1 páginaMii515 s2 Entregable PDF Planificación de Recursos Empresariales Computación en La NubedilimagoAún no hay calificaciones
- Libro Físico Versus Libro ElectrónicoDocumento2 páginasLibro Físico Versus Libro ElectrónicomariajulianaoterohAún no hay calificaciones
- Brochure Produccion Musical OnlineDocumento9 páginasBrochure Produccion Musical OnlinesamirvalentinmarquinezmoralesAún no hay calificaciones
- Proyecto de Sistemas de Control - V1Documento2 páginasProyecto de Sistemas de Control - V1cayetanojcmAún no hay calificaciones
- Evaluacion NeumaDocumento3 páginasEvaluacion NeumaDavid Santiago López SúarezAún no hay calificaciones