También podría gustarte
- Nomenclatura de las sustancias químicasDe EverandNomenclatura de las sustancias químicasCalificación: 5 de 5 estrellas5/5 (2)
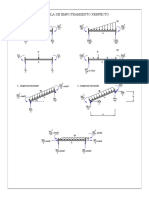
- Formulas ME Vigas Elab Hector DiazDocumento4 páginasFormulas ME Vigas Elab Hector DiazHector DiazAún no hay calificaciones
- Oportunidad de Aprendizaje 2 Aula de JuliaDocumento5 páginasOportunidad de Aprendizaje 2 Aula de JuliaDavid100% (1)
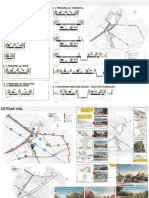
- Sistema Vial PDF Sector - ArequipaDocumento2 páginasSistema Vial PDF Sector - ArequipaNatali Madeli HO100% (1)
- Momentos de Empotramiento Perfecto PDFDocumento1 páginaMomentos de Empotramiento Perfecto PDFJulio Gamez100% (1)
- Química VerdeDocumento23 páginasQuímica VerdeMichell ReyesAún no hay calificaciones
- Uso EPPDocumento36 páginasUso EPPMiGuelANgelInGarucaAún no hay calificaciones
- Momentos de Empotramiento Perfecto PDFDocumento1 páginaMomentos de Empotramiento Perfecto PDFOscar Sabogal100% (1)
- Momentos de Empotramiento Perfecto PDFDocumento1 páginaMomentos de Empotramiento Perfecto PDFEfrain Roque FloresAún no hay calificaciones
- Momentos de Empotramiento Perfecto PDFDocumento1 páginaMomentos de Empotramiento Perfecto PDFMiguel MezaAún no hay calificaciones
- Momentos de Empotramiento PerfectoDocumento2 páginasMomentos de Empotramiento PerfectoAndres F Lux0% (1)
- Tabla Mep 2019 PDFDocumento1 páginaTabla Mep 2019 PDFNatlia GomezAún no hay calificaciones
- Tablas EstructurasDocumento10 páginasTablas EstructurasMarcelo VissaniAún no hay calificaciones
- Tablas EstructurasDocumento10 páginasTablas EstructurasJhosep Bustamante HuamanAún no hay calificaciones
- Tipos de carga y reacciones en apoyosDocumento1 páginaTipos de carga y reacciones en apoyosMiguel Zuasnabar AllcaAún no hay calificaciones
- Demostración de Las Deformaciones AngularesDocumento1 páginaDemostración de Las Deformaciones AngularesH MVAún no hay calificaciones
- Ritmos de Cajon PeruanoDocumento1 páginaRitmos de Cajon PeruanoLeonardo RodriguezAún no hay calificaciones
- Formulario de Geometría Del EspacioDocumento1 páginaFormulario de Geometría Del EspacioKenny Oñate QuirozAún no hay calificaciones
- Tema 6 - Momentos de Extremos Fijos PDFDocumento2 páginasTema 6 - Momentos de Extremos Fijos PDFAlvaroMarínFloresAún no hay calificaciones
- MOMENTOS-EXTREMOS-FIJOSDocumento2 páginasMOMENTOS-EXTREMOS-FIJOSAlvaroMarínFloresAún no hay calificaciones
- Hoja Del ArcaDocumento2 páginasHoja Del ArcaCamilo FurioluAún no hay calificaciones
- Hoja Del ArcaDocumento2 páginasHoja Del ArcaMarlon SandovalAún no hay calificaciones
- Tabla Momentos Empotramiento VigasDocumento2 páginasTabla Momentos Empotramiento VigasKEVIN MARÍN ACEVEDOAún no hay calificaciones
- Tabla de Vigas Continuas SimplificadaDocumento1 páginaTabla de Vigas Continuas Simplificadaflorencia listaAún no hay calificaciones
- Ejemplo de Planillas de InformesDocumento23 páginasEjemplo de Planillas de InformesKaren VillarruelAún no hay calificaciones
- Pracitca 1 ELT 240 AuxiliaturaDocumento3 páginasPracitca 1 ELT 240 AuxiliaturaNelson Neiber Chara AlizaresAún no hay calificaciones
- Practica 2 Deformaciones en Secciones VariablesDocumento7 páginasPractica 2 Deformaciones en Secciones VariablesjosephAún no hay calificaciones
- Geometria en El Espacio 1Documento1 páginaGeometria en El Espacio 1juan perezAún no hay calificaciones
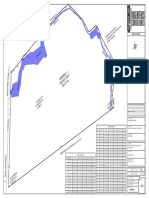
- T100 - Plano GeneralDocumento1 páginaT100 - Plano Generaljrlr19993Aún no hay calificaciones
- EA1 - Tabla - Ecuación de Los 3 MomentosDocumento2 páginasEA1 - Tabla - Ecuación de Los 3 MomentosLuz RodaAún no hay calificaciones
- Planos de DesagueDocumento6 páginasPlanos de DesagueFabrizio VillanAún no hay calificaciones
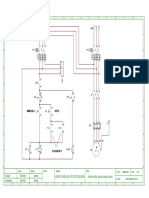
- Ligação Qta TrifasicoDocumento1 páginaLigação Qta TrifasicoSistema MPA de ComunicaçãoAún no hay calificaciones
- Familia Condezo: Principal DormitorioDocumento1 páginaFamilia Condezo: Principal DormitorioMaria CastroAún no hay calificaciones
- Valvulas de Presion 3 RPM PDFDocumento19 páginasValvulas de Presion 3 RPM PDFRenato ManchegoAún no hay calificaciones
- Formatos Si-I-01Documento4 páginasFormatos Si-I-01Luis RendonAún no hay calificaciones
- Civ 451 Practico #1Documento3 páginasCiv 451 Practico #1Dagnio Aldo Girón SubiaAún no hay calificaciones
- Hidráulica - Válvulas Reguladoras de Caudal y de Presión PDFDocumento1 páginaHidráulica - Válvulas Reguladoras de Caudal y de Presión PDFJose CabalAún no hay calificaciones
- Esquema Plano ElectricoDocumento1 páginaEsquema Plano Electricoalexocrew93Aún no hay calificaciones
- Daftar Hadir USDocumento10 páginasDaftar Hadir USAnton RestAún no hay calificaciones
- Tabela Método Dos Deslocamentos #AmorpelaengenhariaDocumento2 páginasTabela Método Dos Deslocamentos #AmorpelaengenhariaM'mylla SarmentoAún no hay calificaciones
- R-3 Prot. Arquitectonicos PDFDocumento7 páginasR-3 Prot. Arquitectonicos PDFMichelle LealAún no hay calificaciones
- Vigas Hiperestáticas 3Documento5 páginasVigas Hiperestáticas 3antonio de jesus garcia nangullasmuAún no hay calificaciones
- Control WAGO CK4Documento8 páginasControl WAGO CK4Jesus Ariel ToledoAún no hay calificaciones
- Ccc33,3arr Bomb FlotDocumento1 páginaCcc33,3arr Bomb Floteduardoguerra155_604Aún no hay calificaciones
- Copia de Programa de Limpieza Higt TechDocumento9 páginasCopia de Programa de Limpieza Higt Techcarlos sanchez alonsoAún no hay calificaciones
- Curso Movimiento de Tierras UPTC TYV 2013Documento39 páginasCurso Movimiento de Tierras UPTC TYV 2013juan 26Aún no hay calificaciones
- Ejercicios Sintesis 2Documento4 páginasEjercicios Sintesis 2Jesús Leyva GarcíaAún no hay calificaciones
- Trabajo 23Documento1 páginaTrabajo 23PAOLA ANDREA QUENALLATA CHIPANAAún no hay calificaciones
- Momentos de Empotramiento Perfecto PDFDocumento1 páginaMomentos de Empotramiento Perfecto PDFMiguel Angel Bautista GarciaAún no hay calificaciones
- Momentos de empotramiento perfectoDocumento1 páginaMomentos de empotramiento perfectojorginho50% (2)
- Trasformada .Mat 1207hDocumento9 páginasTrasformada .Mat 1207hALBERTO GUTIERREZ QUISPEAún no hay calificaciones
- Et22ag 12.1Documento5 páginasEt22ag 12.1baldera22Aún no hay calificaciones
- REVISION 1 28.02.24Documento1 páginaREVISION 1 28.02.24earturo663Aún no hay calificaciones
- Tabla de Empotramiento Perfecto: WL 30 WL 20 WL 12 WL 12Documento1 páginaTabla de Empotramiento Perfecto: WL 30 WL 20 WL 12 WL 12Fabiano PazAún no hay calificaciones
- Tabla Empotram - PerfectoDocumento1 páginaTabla Empotram - PerfectoRenzo Chuquilin GarciaAún no hay calificaciones
- Ejercicios Tema 4 - CentroidesDocumento2 páginasEjercicios Tema 4 - CentroidessilviaAún no hay calificaciones
- PHB tgs.03 Pl. Layout1Documento1 páginaPHB tgs.03 Pl. Layout1alfonsoAún no hay calificaciones
- Cat MinicentralesDocumento9 páginasCat MinicentralespanalcaAún no hay calificaciones
- Regimen de SesionesDocumento33 páginasRegimen de SesionesGarza112Aún no hay calificaciones
- Tramite DocumentarioDocumento3 páginasTramite DocumentarioCinthya Eusebia Quispe PomaAún no hay calificaciones
- MANUAL Lumix g7Documento68 páginasMANUAL Lumix g7jcaro26Aún no hay calificaciones
- 7 Pasos Probados para Conseguir Un BUEN TRABAJO Como Arquitecto Incluso SIN Tener Experiencia PDFDocumento17 páginas7 Pasos Probados para Conseguir Un BUEN TRABAJO Como Arquitecto Incluso SIN Tener Experiencia PDFlopez1001Aún no hay calificaciones
- Calentamiento PDFDocumento5 páginasCalentamiento PDFMarta Hernandez VianaAún no hay calificaciones
- ELECTROSTÁTICOSDocumento14 páginasELECTROSTÁTICOSduba12350% (2)
- Porcentajes ResueltoDocumento4 páginasPorcentajes ResueltoYOLKATANIAAún no hay calificaciones
- Policia Preventiva Y ComunitariaDocumento4 páginasPolicia Preventiva Y ComunitariaGenesis VillacresAún no hay calificaciones
- 16 El Cerebro Cambia y Rejuvenece 1Documento14 páginas16 El Cerebro Cambia y Rejuvenece 1Agus CabelloAún no hay calificaciones
- Documentos Requeridos para Recepcion MunicipalDocumento1 páginaDocumentos Requeridos para Recepcion MunicipalValyria EvergardenAún no hay calificaciones
- Paula Martinez Sagredo (2007) - Algunas Consideraciones en Torno Al Concepto de Oralidad y Su Aplicacion en El Analisis de Textos ColonialesDocumento11 páginasPaula Martinez Sagredo (2007) - Algunas Consideraciones en Torno Al Concepto de Oralidad y Su Aplicacion en El Analisis de Textos ColonialesVanesa Ledesma UrrutiAún no hay calificaciones
- Coloración PasDocumento21 páginasColoración PasVicttoryaAún no hay calificaciones
- Valores y AntivaloresDocumento3 páginasValores y AntivaloresFernando Callata CardenasAún no hay calificaciones
- FaltanteCaja$1275Documento3 páginasFaltanteCaja$1275Blanca AguilarAún no hay calificaciones
- La Maquinaria de Movimiento de TierrasDocumento6 páginasLa Maquinaria de Movimiento de TierrasKarinaCastilloAún no hay calificaciones
- Informe Instalación de DesagueDocumento6 páginasInforme Instalación de DesagueWilman IshpilcoAún no hay calificaciones
- Cationes Del Grupo IiiaDocumento4 páginasCationes Del Grupo IiiaJhoelvis ChoqueAún no hay calificaciones
- PrematurosDocumento10 páginasPrematurosMaria Pia Francisca Lopez PradenasAún no hay calificaciones
- Dolor de GargantaDocumento3 páginasDolor de GargantaRuperto CahuanaAún no hay calificaciones
- T1 Sistemas Activos-Ventilación y CalefacciónDocumento146 páginasT1 Sistemas Activos-Ventilación y CalefacciónEmanuel Carril MedinaAún no hay calificaciones
- PRACTICA 7 Configuracion de TerrenoDocumento10 páginasPRACTICA 7 Configuracion de TerrenoRigFabyAún no hay calificaciones
- Universidad Nacional de Chimborazo Plan CurricularDocumento6 páginasUniversidad Nacional de Chimborazo Plan Curricularrichycc7Aún no hay calificaciones
- ConvocatoriaCASNo 001 2023 UNSAACDocumento31 páginasConvocatoriaCASNo 001 2023 UNSAACAngie Aucca AuquipumaAún no hay calificaciones
- Muestreo Por Conglomerados TemaDocumento7 páginasMuestreo Por Conglomerados Temakat HernandezAún no hay calificaciones
- 54 Perforacion DiamantinaDocumento14 páginas54 Perforacion DiamantinaJUAN DANIEL HIDALGO CASTROAún no hay calificaciones
- Recoleccion Información Primera EtapaDocumento84 páginasRecoleccion Información Primera EtapaLuz Dary CuastumalAún no hay calificaciones