0% encontró este documento útil (0 votos)
44 vistas25 páginasUnidades SI: Definiciones y Ejemplos
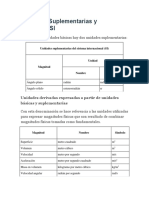
Las unidades básicas del SI son el metro, kilogramo, segundo, ampere, kelvin, mol y candela. Se definen otras unidades derivadas como el hertz, newton, pascal y joule. Cada unidad se define en términos de las propiedades fundamentales de longitud, masa, tiempo, corriente eléctrica, temperatura, cantidad de sustancia e intensidad luminosa.
Cargado por
DokamDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
44 vistas25 páginasUnidades SI: Definiciones y Ejemplos
Las unidades básicas del SI son el metro, kilogramo, segundo, ampere, kelvin, mol y candela. Se definen otras unidades derivadas como el hertz, newton, pascal y joule. Cada unidad se define en términos de las propiedades fundamentales de longitud, masa, tiempo, corriente eléctrica, temperatura, cantidad de sustancia e intensidad luminosa.
Cargado por
DokamDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd