También podría gustarte
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Antenas verticales para bajas frecuencias: (MF y HF)De EverandAntenas verticales para bajas frecuencias: (MF y HF)Aún no hay calificaciones
- ds311 Specification Sheet English - En.esDocumento4 páginasds311 Specification Sheet English - En.esCENVIM UNSCH CEMROBAún no hay calificaciones
- Parametros Eléctricos - Lineas ElectricasDocumento2 páginasParametros Eléctricos - Lineas ElectricasJackson Aranda Solis100% (1)
- Calculos Energia Incidente y Fronteras de Arc Flash 2019 FINALDocumento33 páginasCalculos Energia Incidente y Fronteras de Arc Flash 2019 FINALHenryMuñozAún no hay calificaciones
- Características: Serie 22 - Contactores Modulares 25 - 40 - 63 ADocumento6 páginasCaracterísticas: Serie 22 - Contactores Modulares 25 - 40 - 63 ARodolfo VázquezAún no hay calificaciones
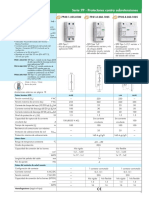
- Gemidi 1º Interruptores Automaticos 2010Documento22 páginasGemidi 1º Interruptores Automaticos 2010CristihanAún no hay calificaciones
- Sensor de VibracionDocumento2 páginasSensor de VibracionFuerza MotrizAún no hay calificaciones
- 3271 Fema Datasheet Isc-VacDocumento2 páginas3271 Fema Datasheet Isc-VacJlavieraAún no hay calificaciones
- Finder Reles Serie 40Documento8 páginasFinder Reles Serie 40Jorge Luis MalagonAún no hay calificaciones
- ShuntDocumento2 páginasShuntManuel Gomez100% (1)
- Serie 10 S10 - 01Documento2 páginasSerie 10 S10 - 01Emilio BonnetAún no hay calificaciones
- HP Ea7b02l eDocumento2 páginasHP Ea7b02l eJorgeAún no hay calificaciones
- Telerruptor FinderDocumento3 páginasTelerruptor FinderjmarambioAún no hay calificaciones
- Serie 10Documento2 páginasSerie 10Julio MendezAún no hay calificaciones
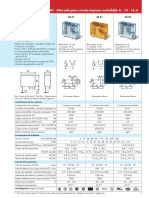
- Características: Serie 40 - Mini-Relé para Circuito Impreso Enchufable 8 - 10 - 12 - 16 ADocumento18 páginasCaracterísticas: Serie 40 - Mini-Relé para Circuito Impreso Enchufable 8 - 10 - 12 - 16 AYul GoncalvesAún no hay calificaciones
- CATES - Serie62 Relé de Potencia Con Diodo HornitosDocumento39 páginasCATES - Serie62 Relé de Potencia Con Diodo HornitosMario Carvajal VergaraAún no hay calificaciones
- Datasheet Minibreaker ChintDocumento3 páginasDatasheet Minibreaker ChintSantiago Mejía RAún no hay calificaciones
- Finder - S7PESDocumento20 páginasFinder - S7PESSantiago BAún no hay calificaciones
- HGM800 DatasheetDocumento2 páginasHGM800 DatasheetivanAún no hay calificaciones
- ManualdeUsuariodeCHIKIv1 0Documento20 páginasManualdeUsuariodeCHIKIv1 0Miguel Angel LopezAún no hay calificaciones
- HGM250 DatasheetDocumento2 páginasHGM250 DatasheetJhonn OjedaAún no hay calificaciones
- Transductores LinealesDocumento2 páginasTransductores LinealesEstefania GomezAún no hay calificaciones
- PE - 7 - Unidad 3 - RelésDocumento33 páginasPE - 7 - Unidad 3 - RelésnelferjezAún no hay calificaciones
- j013 Myk General-Purpose Latching Relay Datasheet EsDocumento4 páginasj013 Myk General-Purpose Latching Relay Datasheet EsaaaguilarmAún no hay calificaciones
- Kyo RitsuDocumento16 páginasKyo RitsuFernando CespedesAún no hay calificaciones
- Guardamotor HyundaiDocumento1 páginaGuardamotor Hyundaioscard1ofAún no hay calificaciones
- Dimensionamiento de Líneas Eléctricas Aéreas en Alta Tensión Con Conductores Utilizados en España Tipo AL1-ST1A - 1Documento8 páginasDimensionamiento de Líneas Eléctricas Aéreas en Alta Tensión Con Conductores Utilizados en España Tipo AL1-ST1A - 1Danny Jefferson Sánchez YánezAún no hay calificaciones
- 177 Folleto Contactores Modulares Serie CMDocumento2 páginas177 Folleto Contactores Modulares Serie CMjuanmg1984Aún no hay calificaciones
- Filtros FagorDocumento2 páginasFiltros FagorRogério PereiraAún no hay calificaciones
- Finder Reles Serie 80Documento7 páginasFinder Reles Serie 80Moniko Moises Magaña MaldonadoAún no hay calificaciones
- sdm32 sdr450Documento2 páginassdm32 sdr450Jamal HabbasAún no hay calificaciones
- FT Ficha Tecnica PDFDocumento1 páginaFT Ficha Tecnica PDFAlejandro D AAún no hay calificaciones
- Eba200-200s EsDocumento4 páginasEba200-200s EsPaul Arturo Boza HuarocAún no hay calificaciones
- Finder Reles Serie 70Documento9 páginasFinder Reles Serie 70Harold Torrico SalazarAún no hay calificaciones
- CABLE PARA BALIZA HP - EA2Y0HA - eDocumento3 páginasCABLE PARA BALIZA HP - EA2Y0HA - erolando marquezAún no hay calificaciones
- Finder Reles Serie 60 PDFDocumento6 páginasFinder Reles Serie 60 PDFPedro Nuñez SuarezAún no hay calificaciones
- Fibra OpticaDocumento95 páginasFibra OpticaAna Paucar AyllonAún no hay calificaciones
- Ficha - Chint - Serie DZ158Documento3 páginasFicha - Chint - Serie DZ158Rulo Hdez LazoAún no hay calificaciones
- Ficha Omega TRDocumento2 páginasFicha Omega TRMiguel Pino BAún no hay calificaciones
- 1SAM350000R1015Documento8 páginas1SAM350000R1015elliotmoralesAún no hay calificaciones
- Cable 5 8Documento1 páginaCable 5 8juan carlos moraAún no hay calificaciones
- Clamper PRBT RdsDocumento2 páginasClamper PRBT RdsAlex Laurean MartinezAún no hay calificaciones
- Clamper PRBT RdsDocumento2 páginasClamper PRBT RdsMarcelo VillarAún no hay calificaciones
- Clamper PRBT RDS PDFDocumento2 páginasClamper PRBT RDS PDFMarcelo VillarAún no hay calificaciones
- Lebrero 135 TTDocumento1 páginaLebrero 135 TTcasigreAún no hay calificaciones
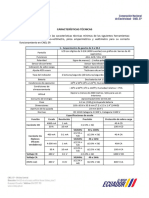
- Características TécnicasDocumento8 páginasCaracterísticas TécnicasMonserrate AcostaAún no hay calificaciones
- FT MC1 SP PDFDocumento1 páginaFT MC1 SP PDFJose Raul Moreta ViciosoAún no hay calificaciones
- Ficha Tecnica 525601Documento1 páginaFicha Tecnica 525601Luis MendozaAún no hay calificaciones
- 2CSF202001R1250 f202 Ac 25 0 03Documento5 páginas2CSF202001R1250 f202 Ac 25 0 03Jose LopezAún no hay calificaciones
- Eba200-200s EsDocumento4 páginasEba200-200s EsJOSE LUIS QUISPE COLLAZOSAún no hay calificaciones
- BenderDocumento4 páginasBenderDavid RojasAún no hay calificaciones
- Rele EbcapsuladoDocumento12 páginasRele EbcapsuladoHipolito MBAún no hay calificaciones
- Catalogo Schneider GralDocumento46 páginasCatalogo Schneider GralDiego RamonAún no hay calificaciones
- FT Ficha TecnicaDocumento1 páginaFT Ficha Tecnicadaviddc93Aún no hay calificaciones
- HT77 InfoDocumento1 páginaHT77 InfoJose Antonio ReinaAún no hay calificaciones
- BrochureDocumento1 páginaBrochureIván GonzálezAún no hay calificaciones
- Vex 01Documento2 páginasVex 01Antonio RiquelmeAún no hay calificaciones
- Serie 80 Timers FinderDocumento8 páginasSerie 80 Timers FinderJuan EscutiaAún no hay calificaciones
- ET AT 001 - Unlocked PDFDocumento46 páginasET AT 001 - Unlocked PDFIldeMillanoAún no hay calificaciones