También podría gustarte
- Robot Clamp MountDocumento1 páginaRobot Clamp Mountyudolft jhaniioAún no hay calificaciones
- Pieza 4Documento1 páginaPieza 4Erick AndresAún no hay calificaciones
- Pixma Tech 04/12/2014: Dise o de Revisado Por Aprobado Por Fecha FechaDocumento1 páginaPixma Tech 04/12/2014: Dise o de Revisado Por Aprobado Por Fecha FechaDENNIS DANIEL CÓNDORI MOLLOAún no hay calificaciones
- Plano de Carcaza Lado SucciónDocumento1 páginaPlano de Carcaza Lado SucciónTeofila SalasAún no hay calificaciones
- T02 PDFDocumento1 páginaT02 PDFSamanta JimenezAún no hay calificaciones
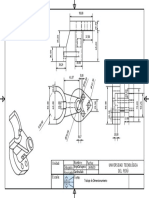
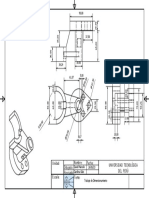
- Plano5Portacandado MariposaDocumento1 páginaPlano5Portacandado MariposaLalo AguilarAún no hay calificaciones
- Horno Rotatorio - Fundicion y MoldeoDocumento1 páginaHorno Rotatorio - Fundicion y MoldeoAlex Caleb Pocohuanca RomeroAún no hay calificaciones
- Tambor Motriz HojaDocumento1 páginaTambor Motriz HojaCarlos Olivares ZegarraAún no hay calificaciones
- Dibujo CadDocumento1 páginaDibujo CadbrayanhiamorAún no hay calificaciones
- Planos de Una Cancha de FutzalDocumento6 páginasPlanos de Una Cancha de Futzalgiovanni choqueAún no hay calificaciones
- Marco Durand Entregable 02Documento1 páginaMarco Durand Entregable 02Marco Antonio DurandAún no hay calificaciones
- Ing. Alan López 26/03/2023Documento1 páginaIng. Alan López 26/03/2023Samanta JimenezAún no hay calificaciones
- GANCHODocumento1 páginaGANCHOALEX MONTIELAún no hay calificaciones
- Planos Motor Stirling (Grupo 4)Documento25 páginasPlanos Motor Stirling (Grupo 4)Andrés BallénAún no hay calificaciones
- Cajetin Ejercicio 2Documento1 páginaCajetin Ejercicio 2GasparAún no hay calificaciones
- Gancho 1Documento1 páginaGancho 1gustavoAún no hay calificaciones
- Molde EmpaqueDocumento1 páginaMolde Empaquemiguel angel MunguiaAún no hay calificaciones
- Actividad 2.1 Arpi FaustoDocumento1 páginaActividad 2.1 Arpi FaustoFausto Arpi DelegAún no hay calificaciones
- Construccion Aulas Unidad Educativa Emilio FinotDocumento1 páginaConstruccion Aulas Unidad Educativa Emilio FinotAdhemar FloresAún no hay calificaciones
- Pieza 9Documento1 páginaPieza 9Nicolay LozanoAún no hay calificaciones
- DPT Perfil de SueloDocumento1 páginaDPT Perfil de SueloEssmeralda RojasAún no hay calificaciones
- Eje de Polea SuperiorDocumento1 páginaEje de Polea SuperiorLuis ArciaAún no hay calificaciones
- PRINTDocumento1 páginaPRINTElias moreno cAún no hay calificaciones
- BOCETO Clase4 RIVERAJIMMYDocumento1 páginaBOCETO Clase4 RIVERAJIMMYEmanuelAún no hay calificaciones
- Bornera HornoDocumento1 páginaBornera HornoingenieriacmoAún no hay calificaciones
- Master Rod DibujoDocumento1 páginaMaster Rod DibujojosegaelrodriguezAún no hay calificaciones
- Barra TelescopicaDocumento1 páginaBarra TelescopicaP.Alonso Rebolledo ArellanoAún no hay calificaciones
- Cajera Con MultinivelDocumento1 páginaCajera Con MultinivelEstudiante - Luisa SantanderAún no hay calificaciones
- Plano 1 BloqueDocumento1 páginaPlano 1 BloqueLuis Edward Soriano MuñozAún no hay calificaciones
- Plano Lateral InferiorDocumento1 páginaPlano Lateral InferiorYOANDRI GUERREROAún no hay calificaciones
- Plano para Gimnasio de GatoDocumento1 páginaPlano para Gimnasio de GatoKarenh BarreroAún no hay calificaciones
- Planta Por EtapasDocumento1 páginaPlanta Por EtapasJosé MAún no hay calificaciones
- Remolque: Producto SOLIDWORKS Educational. Solo para Uso en La EnseñanzaDocumento1 páginaRemolque: Producto SOLIDWORKS Educational. Solo para Uso en La Enseñanzajuanda.rojaszaAún no hay calificaciones
- DimensionDocumento1 páginaDimensiondavid marceloAún no hay calificaciones
- Eje MaquinaDocumento1 páginaEje MaquinaWilly LimariAún no hay calificaciones
- EjemploDocumento1 páginaEjemploMelany Yadhira Salinas TapiaAún no hay calificaciones
- Dimension DavidDocumento1 páginaDimension Daviddavid marceloAún no hay calificaciones
- Plano Rodete JulioDocumento1 páginaPlano Rodete JulioKiabeth CháirezAún no hay calificaciones
- Ensamblaje .Nº1Documento6 páginasEnsamblaje .Nº1Darwin guido Suca DiazAún no hay calificaciones
- Chumacera .VISTASDocumento1 páginaChumacera .VISTASJilarry MAún no hay calificaciones
- Chumacera .VISTAS ,...Documento1 páginaChumacera .VISTAS ,...Jilarry MAún no hay calificaciones
- Rodillo Motriz 2 - Homogenizador - CubeteadoraDocumento1 páginaRodillo Motriz 2 - Homogenizador - CubeteadoraAndres MontalvoAún no hay calificaciones
- Levantamiento de Pieza Juan FerrerDocumento1 páginaLevantamiento de Pieza Juan FerrerIGNACIO ANDAURAún no hay calificaciones
- Inventor - Plano de Detalle - Eje MayorDocumento1 páginaInventor - Plano de Detalle - Eje MayorLUIS PRECIADOAún no hay calificaciones
- T04 PDFDocumento1 páginaT04 PDFSamanta JimenezAún no hay calificaciones
- Plano de Ensamblaje 3.Documento1 páginaPlano de Ensamblaje 3.Sebastian Andres Paternina MirandaAún no hay calificaciones
- Plano Proyecto 2019 (Convertido)Documento1 páginaPlano Proyecto 2019 (Convertido)Franklin René Tebelán castilloAún no hay calificaciones
- Plano Prototipo 1Documento1 páginaPlano Prototipo 1Alejandro Escobar GuevaraAún no hay calificaciones
- Practica 4Documento1 páginaPractica 4Myriam PalmerAún no hay calificaciones
- Pistil LoDocumento1 páginaPistil LoHector Geovanny Villacis JimenezAún no hay calificaciones
- Plano DFDFDDocumento1 páginaPlano DFDFDjosue sulca carrilloAún no hay calificaciones
- Nivel III-TP Nº1-Resolución de Pórticos-2019Documento22 páginasNivel III-TP Nº1-Resolución de Pórticos-2019Julian Adam CiancioAún no hay calificaciones
- Disco de 3Documento1 páginaDisco de 3carlos alberto Padilla RamirezAún no hay calificaciones
- Inventor - Plano de Detalle - Polea MayorDocumento1 páginaInventor - Plano de Detalle - Polea MayorLUIS PRECIADOAún no hay calificaciones
- Cilindro Blanco Planos PDFDocumento1 páginaCilindro Blanco Planos PDFJuan Alvarez OsoroAún no hay calificaciones
- Polea 2Documento1 páginaPolea 2yimmy cabreraAún no hay calificaciones
- PLANOSDocumento12 páginasPLANOSNaydu Alejandra Acosta CarpettaAún no hay calificaciones
- Planos de Diseño CR-PLANO DE TECHODocumento1 páginaPlanos de Diseño CR-PLANO DE TECHOKevin Palacios allaucaAún no hay calificaciones
- MARMITADocumento1 páginaMARMITAtheblinks worksAún no hay calificaciones
- Fundamentos de econometría intermedia: Teoría y aplicacionesDe EverandFundamentos de econometría intermedia: Teoría y aplicacionesAún no hay calificaciones
- En Puno El Uso de Los Baños Termales Se Realizan Desde El Periodo IncaicoDocumento11 páginasEn Puno El Uso de Los Baños Termales Se Realizan Desde El Periodo IncaicoLizFiorelyQuispeAún no hay calificaciones
- Video Día AmbientalDocumento3 páginasVideo Día AmbientalSophiAún no hay calificaciones
- Respuesta A Las Declaraciones de GoirizelaiaDocumento3 páginasRespuesta A Las Declaraciones de Goirizelaiamaría_lorenzo_2Aún no hay calificaciones
- Solteros Muy Irresistibles - Un Soltero Excepcional - Layla HagenDocumento394 páginasSolteros Muy Irresistibles - Un Soltero Excepcional - Layla HagenJesenia ValenciaAún no hay calificaciones
- Permisos de Trabajo en AlturaDocumento1 páginaPermisos de Trabajo en AlturaALEXANDER JUNIOR HUAYANA ESPINOZAAún no hay calificaciones
- 1 - Matrices TeoríaDocumento9 páginas1 - Matrices TeoríaMirtha Isamar Manchego HuaycocheaAún no hay calificaciones
- Guía de Aprendizaje Matematica11mo Grado 2020Documento14 páginasGuía de Aprendizaje Matematica11mo Grado 2020Cliffor Jerry Herrera CastrilloAún no hay calificaciones
- Ciclo de Vida de Las AvesDocumento7 páginasCiclo de Vida de Las Avesmiriam0% (1)
- Puente de TakomaDocumento10 páginasPuente de TakomaYORDAN BENJI ALVAREZ LLAZAAún no hay calificaciones
- Saponificación LaboratorioDocumento9 páginasSaponificación Laboratoriojhon muesesAún no hay calificaciones
- Ácido SulfúricoDocumento5 páginasÁcido SulfúricoAntonio HernandezAún no hay calificaciones
- Biotecnología BiocomercioDocumento28 páginasBiotecnología BiocomercioWilliam GarcíaAún no hay calificaciones
- Tarea 4 Presentacion de HazopDocumento15 páginasTarea 4 Presentacion de HazopAna AlvaradoAún no hay calificaciones
- Enfermedades Del Sistema Respiratorio PowerDocumento25 páginasEnfermedades Del Sistema Respiratorio PowerAilin CeresoleAún no hay calificaciones
- 2 2020 ELT3841 Ep2Documento1 página2 2020 ELT3841 Ep2Fabian Arce RiosAún no hay calificaciones
- Fo-Check List Topico de Emergencias - ActaulizadoDocumento3 páginasFo-Check List Topico de Emergencias - Actaulizadojuliojvc640Aún no hay calificaciones
- Medio Ambiente y Usos Del PSDocumento4 páginasMedio Ambiente y Usos Del PSgabriela llanos valenciaAún no hay calificaciones
- Nsid Nsid-308 FormatoalumnotrabajofinalDocumento27 páginasNsid Nsid-308 FormatoalumnotrabajofinalMendoza ShirleyAún no hay calificaciones
- El Pesimismo en Tres Obras de Guillermo FadanelliDocumento20 páginasEl Pesimismo en Tres Obras de Guillermo FadanelliGloria Henao SánchezAún no hay calificaciones
- Leccion 5 OntologiaDocumento4 páginasLeccion 5 OntologiaDetál ValdezAún no hay calificaciones
- ElipseDocumento6 páginasElipsecharlygreenhouseAún no hay calificaciones
- Taller Balanceo de EcuacionesDocumento5 páginasTaller Balanceo de Ecuacioneswilson rodriguez100% (2)
- Inovacion Biomecanica - Diciembre - 2020Documento7 páginasInovacion Biomecanica - Diciembre - 2020Santiago LopezAún no hay calificaciones
- Caso #3 Planta IndustrialDocumento6 páginasCaso #3 Planta IndustrialKiara DelgadoAún no hay calificaciones
- Ficha Tecnoca Chorizo La CunciaDocumento2 páginasFicha Tecnoca Chorizo La CunciaDully MolinaAún no hay calificaciones
- 4.1 Introducción: Diseño de Formas y Reportes, El Cual Describe Cómo Los DatosDocumento28 páginas4.1 Introducción: Diseño de Formas y Reportes, El Cual Describe Cómo Los DatosEdgar LluscoAún no hay calificaciones
- Articulacion de PlanesDocumento32 páginasArticulacion de PlanesDavidH1608Aún no hay calificaciones
- Semana 04 Funciones y Funciones InversaDocumento19 páginasSemana 04 Funciones y Funciones InversaNavy SealAún no hay calificaciones
- Casi ListeilorDocumento14 páginasCasi Listeilormauricio espinosaAún no hay calificaciones
- Práctica 5 Lab IDocumento6 páginasPráctica 5 Lab IAby Ponce GonzálezAún no hay calificaciones