También podría gustarte
- 2 ParcialDocumento31 páginas2 Parcialluis galanAún no hay calificaciones
- Manual de Cálculo Diferencial UCMDocumento103 páginasManual de Cálculo Diferencial UCMSergioAún no hay calificaciones
- Ecuaciones Diferenciales y Sistemas Dinamicos Una PDFDocumento49 páginasEcuaciones Diferenciales y Sistemas Dinamicos Una PDFjorgeAún no hay calificaciones
- Tema 1.2 - Normas matricialesDocumento15 páginasTema 1.2 - Normas matricialesPablo MenéndezAún no hay calificaciones
- Teorias Gauge JESUS SEVILLADocumento31 páginasTeorias Gauge JESUS SEVILLAJesús Sevilla PérezAún no hay calificaciones
- Facultad de Ciencias Matem Aticas. UCM: Manual de C Alculo DiferencialDocumento103 páginasFacultad de Ciencias Matem Aticas. UCM: Manual de C Alculo DiferencialluisitolazitoAún no hay calificaciones
- Metodos AlcubierreDocumento22 páginasMetodos AlcubierreCarlos MillanAún no hay calificaciones
- Ecuaciones diferenciales y sistemas dinámicosDocumento50 páginasEcuaciones diferenciales y sistemas dinámicosBoris CocaricoAún no hay calificaciones
- Numeros P AdicosDocumento39 páginasNumeros P AdicosKatherineAyalaAún no hay calificaciones
- Trabajo de Unidad II Algebra SuperiorDocumento23 páginasTrabajo de Unidad II Algebra SuperiorERICK EDUARDO GONZALES CASTROAún no hay calificaciones
- Análisis II - Artemio González PDFDocumento102 páginasAnálisis II - Artemio González PDFRosi Marleny Machuca rojasAún no hay calificaciones
- Resumen de InvestigacionDocumento33 páginasResumen de InvestigacionRaúl Barrios MendozaAún no hay calificaciones
- Cadenas de Markov finitasDocumento104 páginasCadenas de Markov finitasMiguel Angel Varela LópezAún no hay calificaciones
- Capitulo 1 Guia Mecanica Cuantica 1 PDFDocumento11 páginasCapitulo 1 Guia Mecanica Cuantica 1 PDFEdgar Noe Ahedo MendozaAún no hay calificaciones
- TituloDocumento65 páginasTituloHaxel Pelayo GarciaAún no hay calificaciones
- Not As Olimpia Das MateDocumento9 páginasNot As Olimpia Das MateHenry MongeAún no hay calificaciones
- Apuntes Gobernado Sin AnunciosDocumento67 páginasApuntes Gobernado Sin Anunciossamuel.vicente.abAún no hay calificaciones
- Cadenas de MarkovDocumento37 páginasCadenas de MarkovCarlos Nava100% (1)
- El Método de Shooting: Universitat de Les Illes BalearsDocumento6 páginasEl Método de Shooting: Universitat de Les Illes BalearsMariaAún no hay calificaciones
- NavierDocumento13 páginasNavierKelly Guevara MosqueraAún no hay calificaciones
- SL IiiDocumento17 páginasSL Iiifernanda gaticaAún no hay calificaciones
- Trabajo Mec Nica Cu NticaDocumento21 páginasTrabajo Mec Nica Cu NticaGuillermo Martínez RamónAún no hay calificaciones
- Trabajo Mec Nica Cu NticaDocumento21 páginasTrabajo Mec Nica Cu NticaGuillermo Martínez RamónAún no hay calificaciones
- Diferencia Finitas PDFDocumento70 páginasDiferencia Finitas PDFLeila SequeiraAún no hay calificaciones
- Ampliacion de MatematicasDocumento49 páginasAmpliacion de MatematicasRodri XerezAún no hay calificaciones
- PRESENTACIÓNDocumento46 páginasPRESENTACIÓNCristhian Lenin Mata CabanaAún no hay calificaciones
- Modelos Cosmológicos Alternativos Al de Friedmann PDFDocumento37 páginasModelos Cosmológicos Alternativos Al de Friedmann PDFJuan David García FuentesAún no hay calificaciones
- Métodos Matemáticos de la FísicaDocumento82 páginasMétodos Matemáticos de la FísicaJuan Jose Martinez ValladaresAún no hay calificaciones
- Problemas Resueltos MAT1630 Por Sebastian UrrutiaDocumento97 páginasProblemas Resueltos MAT1630 Por Sebastian Urrutiarosselot1234Aún no hay calificaciones
- Introduccion Al Algebra Lineal NumericaDocumento151 páginasIntroduccion Al Algebra Lineal NumericaOmarAún no hay calificaciones
- Ecuaciones Diferenciales Punto Fijo PDFDocumento39 páginasEcuaciones Diferenciales Punto Fijo PDFBrandon CarhuasAún no hay calificaciones
- Polinomios y RaícesDocumento40 páginasPolinomios y RaícesOlha SharhorodskaAún no hay calificaciones
- Universidad Nacional de Ingenier IA Facultad de CienciasDocumento113 páginasUniversidad Nacional de Ingenier IA Facultad de CienciasHaxel Pelayo GarciaAún no hay calificaciones
- Apunte EDO - Prof. Manuel Del PinoDocumento128 páginasApunte EDO - Prof. Manuel Del Pino7wordzAún no hay calificaciones
- Programacion ConicaDocumento6 páginasProgramacion ConicaUlises ArayaAún no hay calificaciones
- Solución Actividad Evaluativa Eje 4 - Ecuaciones DiferencialesDocumento8 páginasSolución Actividad Evaluativa Eje 4 - Ecuaciones Diferencialesfredy diazAún no hay calificaciones
- Teoremas Convergencia Metodos Iterativos SelDocumento69 páginasTeoremas Convergencia Metodos Iterativos SelJohnny Alexander Perafán A.Aún no hay calificaciones
- Introducción a la segunda cuantización en mecánica cuánticaDocumento14 páginasIntroducción a la segunda cuantización en mecánica cuánticaGuillermo Martínez RamónAún no hay calificaciones
- Capitulo 3. Modelos Con Ecuaciones Recursivas EstocasticasDocumento41 páginasCapitulo 3. Modelos Con Ecuaciones Recursivas EstocasticasOctavio Tarazona VelasquezAún no hay calificaciones
- Introduccion A Los Sistemas DinamicosDocumento74 páginasIntroduccion A Los Sistemas Dinamicosalberto rojasAún no hay calificaciones
- Análisis 1Documento120 páginasAnálisis 1Walter OrtegaAún no hay calificaciones
- Métodos computacionales para resolver problemas de optimización unidimensional y multidimensionalDocumento49 páginasMétodos computacionales para resolver problemas de optimización unidimensional y multidimensionalJosé Andrés Martínez PalicheAún no hay calificaciones
- Ayudantía 2 - Newton RaphsonDocumento17 páginasAyudantía 2 - Newton RaphsonRicardo David Villavicencio RosalesAún no hay calificaciones
- Tesis Magister PreliminarDocumento41 páginasTesis Magister Preliminarsanti10sepAún no hay calificaciones
- García Rosa, IgnacioDocumento77 páginasGarcía Rosa, IgnacioDavid SolanoAún no hay calificaciones
- Apuntes Difrencias FinitasDocumento31 páginasApuntes Difrencias FinitasHspetrocrusosAún no hay calificaciones
- Práctica 1 Respuesta A La Frecuencia de Un Sistema Lineal Discreto ICADocumento6 páginasPráctica 1 Respuesta A La Frecuencia de Un Sistema Lineal Discreto ICAg.galarzaAún no hay calificaciones
- Método de Newton para la optimización sin restriccionesDocumento31 páginasMétodo de Newton para la optimización sin restriccionesosnel-gomez-5576Aún no hay calificaciones
- Teoremas Del Punto Fijo para T - ContraccionesDocumento63 páginasTeoremas Del Punto Fijo para T - ContraccionesMauro MalcaAún no hay calificaciones
- Muestra 22Documento148 páginasMuestra 22Asís López EfracioAún no hay calificaciones
- Algoritmo Optimizacion No Lineal Sin Restricciones MA 33ADocumento14 páginasAlgoritmo Optimizacion No Lineal Sin Restricciones MA 33AMilton TorresAún no hay calificaciones
- EDO Notas de CursoDocumento146 páginasEDO Notas de CursoShantilonAún no hay calificaciones
- Contenido Activador Unidad 3 EconometríaDocumento22 páginasContenido Activador Unidad 3 Econometríaalmendra4943Aún no hay calificaciones
- Cap 8. EdpevolDocumento38 páginasCap 8. EdpevolDeisy monroyAún no hay calificaciones
- Tesis Claudia Constanza Tamayo VDocumento79 páginasTesis Claudia Constanza Tamayo VMac UserAún no hay calificaciones
- Lectura 4 Problemas No LinealesDocumento8 páginasLectura 4 Problemas No LinealesEsteban MiguelAún no hay calificaciones
- MarkovDocumento11 páginasMarkovvictorAún no hay calificaciones
- Currículo Matemática Bachillerato SB GuayaquilDocumento259 páginasCurrículo Matemática Bachillerato SB GuayaquilCarlos CherrezAún no hay calificaciones
- Notas de Topología General: Introducción a las Bases TopológicasDocumento55 páginasNotas de Topología General: Introducción a las Bases TopológicasYordan FloresAún no hay calificaciones
- Nociones de Ecuaciones Fisicas-MatematicasDocumento13 páginasNociones de Ecuaciones Fisicas-MatematicasGabriela Mayorga SanchezAún no hay calificaciones
- Mat. y Raz. Matemático I 2023-IDocumento61 páginasMat. y Raz. Matemático I 2023-IFabian GHAún no hay calificaciones
- La Estructura de Grupo de Las Curvas ElípticasDocumento17 páginasLa Estructura de Grupo de Las Curvas ElípticasRicardo VallejoAún no hay calificaciones
- Problemas de TransporteDocumento4 páginasProblemas de TransporteJhon Ipurre MamaniAún no hay calificaciones
- Coordenadas PolaresDocumento11 páginasCoordenadas PolaresLizzKatherineVasquezEnequeAún no hay calificaciones
- Trabajo Practico 9 Continuidad de Una FunciónDocumento7 páginasTrabajo Practico 9 Continuidad de Una FunciónJenifer Castillo ZavaletaAún no hay calificaciones
- Guia Exponenciales Logaritmos 9 A BDocumento4 páginasGuia Exponenciales Logaritmos 9 A BnelsonAún no hay calificaciones
- Sucesiones y series numéricasDocumento11 páginasSucesiones y series numéricasGabriela HuanacuniAún no hay calificaciones
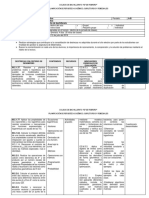
- Planificación de refuerzo académico en MatemáticaDocumento3 páginasPlanificación de refuerzo académico en MatemáticaAngel Lara100% (1)
- Diciembre 2018 Mod3Documento4 páginasDiciembre 2018 Mod3Iker RamónAún no hay calificaciones
- Examen Matemáticas I Ingeniería MecánicaDocumento2 páginasExamen Matemáticas I Ingeniería MecánicacarmenAún no hay calificaciones
- Teormas de Weierstrass, Bolzano, Rolle y LagrangeDocumento7 páginasTeormas de Weierstrass, Bolzano, Rolle y Lagrangejp12Aún no hay calificaciones
- Ejercicios de Matrices y DeterminantesDocumento51 páginasEjercicios de Matrices y Determinantesclebert_conde50% (2)
- Programacion Grafica PrimitivasDocumento51 páginasProgramacion Grafica PrimitivaselvysAún no hay calificaciones
- Cadenas de Markov PDFDocumento12 páginasCadenas de Markov PDFMarco Andres Munoz AvilaAún no hay calificaciones
- 3 PolinomiosDocumento17 páginas3 PolinomiosPablo M. TrujilloAún no hay calificaciones
- Algebra Lineal Actividad S4Documento9 páginasAlgebra Lineal Actividad S4Josh VegaAún no hay calificaciones
- Nsga2 AlgoritmoDocumento7 páginasNsga2 AlgoritmobartolomeggAún no hay calificaciones
- Mamt2 U3 A2 LapbDocumento9 páginasMamt2 U3 A2 LapbLaura Pontón BecerrilAún no hay calificaciones
- 1er Seminario AM1-2022 IIDocumento2 páginas1er Seminario AM1-2022 IIOkay?Aún no hay calificaciones
- libroED PDFDocumento407 páginaslibroED PDFMax Giver Michael Avila HanccoAún no hay calificaciones
- 14 - Parametrización de CurvasDocumento27 páginas14 - Parametrización de CurvasSOLANGE TERESA CASA QUISPEAún no hay calificaciones
- Trabajo Final AlgebraDocumento3 páginasTrabajo Final AlgebraJuliana OquendoAún no hay calificaciones
- 111 - Tarea 2Documento17 páginas111 - Tarea 2Jesus MantillaAún no hay calificaciones
- Calculo diferencial bachillerato UEA ChihuahuaDocumento3 páginasCalculo diferencial bachillerato UEA ChihuahuaMeny ChaviraAún no hay calificaciones
- Aplicacion Funcion VectorialDocumento37 páginasAplicacion Funcion VectorialSergio Garcia Alfaro100% (1)
- 01 AritmeticaDocumento12 páginas01 AritmeticaJorgethorr0% (1)
- Ejemplo de solución de EDO con métodos numéricos y analíticosDocumento3 páginasEjemplo de solución de EDO con métodos numéricos y analíticosNatalia FariñaAún no hay calificaciones
- Cuántica: Qué significa la teoría de la ciencia más extrañaDe EverandCuántica: Qué significa la teoría de la ciencia más extrañaCalificación: 1 de 5 estrellas1/5 (1)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Modelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralDe EverandModelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- La matriz divina: Un puente entre el tiempo, el espacio, las creencias y los milagrosDe EverandLa matriz divina: Un puente entre el tiempo, el espacio, las creencias y los milagrosCalificación: 4 de 5 estrellas4/5 (72)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- El físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoDe EverandEl físico y el filósofo: Albert Einstein, Henri Bergson y el debate que cambió nuestra comprensión del tiempoAún no hay calificaciones
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Mecánica cuántica para principiantesDe EverandMecánica cuántica para principiantesCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Álgebra Tomo Ii: Hake MateDe EverandÁlgebra Tomo Ii: Hake MateCalificación: 5 de 5 estrellas5/5 (2)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Álgebra lineal aplicada a las ciencias económicas 2edDe EverandÁlgebra lineal aplicada a las ciencias económicas 2edCalificación: 4 de 5 estrellas4/5 (1)
- Física y metafísica del espacio y el tiempo: La filosofía en el laboratorioDe EverandFísica y metafísica del espacio y el tiempo: La filosofía en el laboratorioCalificación: 5 de 5 estrellas5/5 (1)
- Las ideas fundamentales del Universo: Espacio, tiempo y movimientoDe EverandLas ideas fundamentales del Universo: Espacio, tiempo y movimientoCalificación: 3.5 de 5 estrellas3.5/5 (3)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Fundamentos de matemática: Introducción al nivel universitarioDe EverandFundamentos de matemática: Introducción al nivel universitarioCalificación: 3 de 5 estrellas3/5 (9)