También podría gustarte
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryCalificación: 3.5 de 5 estrellas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Calificación: 4.5 de 5 estrellas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe EverandNever Split the Difference: Negotiating As If Your Life Depended On ItCalificación: 4.5 de 5 estrellas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaCalificación: 4.5 de 5 estrellas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe EverandThe Little Book of Hygge: Danish Secrets to Happy LivingCalificación: 3.5 de 5 estrellas3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe EverandGrit: The Power of Passion and PerseveranceCalificación: 4 de 5 estrellas4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyCalificación: 3.5 de 5 estrellas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeCalificación: 4 de 5 estrellas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe EverandTeam of Rivals: The Political Genius of Abraham LincolnCalificación: 4.5 de 5 estrellas4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDe EverandRise of ISIS: A Threat We Can't IgnoreCalificación: 3.5 de 5 estrellas3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDe EverandShoe Dog: A Memoir by the Creator of NikeCalificación: 4.5 de 5 estrellas4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe EverandThe Emperor of All Maladies: A Biography of CancerCalificación: 4.5 de 5 estrellas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreCalificación: 4 de 5 estrellas4/5 (1090)
- Her Body and Other Parties: StoriesDe EverandHer Body and Other Parties: StoriesCalificación: 4 de 5 estrellas4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersCalificación: 4.5 de 5 estrellas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceCalificación: 4 de 5 estrellas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureCalificación: 4.5 de 5 estrellas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe EverandThe Unwinding: An Inner History of the New AmericaCalificación: 4 de 5 estrellas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Calificación: 4 de 5 estrellas4/5 (98)
- The Perks of Being a WallflowerDe EverandThe Perks of Being a WallflowerCalificación: 4.5 de 5 estrellas4.5/5 (2099)
- Linde Service Manual (3358042411) 335-02 E18C E20P 0700 (33502 - GB - 0007)Documento134 páginasLinde Service Manual (3358042411) 335-02 E18C E20P 0700 (33502 - GB - 0007)ANGELES NIETOAún no hay calificaciones
- Hydraulic and Electric DiagramDocumento20 páginasHydraulic and Electric DiagramEvert Vargas Torrez100% (1)
- On Fire: The (Burning) Case for a Green New DealDe EverandOn Fire: The (Burning) Case for a Green New DealCalificación: 4 de 5 estrellas4/5 (73)
- Electric Motor EE ST and L - EEA Comment Attended 22 July 2015Documento193 páginasElectric Motor EE ST and L - EEA Comment Attended 22 July 2015gomeraAún no hay calificaciones
- D10D622 Electrical Schematic DiagramDocumento174 páginasD10D622 Electrical Schematic DiagramVertec Engineering100% (3)
- 2.0 en-US 2016-05 SR.2190 2201Documento96 páginas2.0 en-US 2016-05 SR.2190 2201Edgar IbañezAún no hay calificaciones
- Nettur Technical Training FoundationDocumento192 páginasNettur Technical Training FoundationJasopAún no hay calificaciones
- Kap140 LineDocumento108 páginasKap140 LineHenry Blandon50% (4)
- Motor ProtectionDocumento47 páginasMotor ProtectionKhaled RabeaAún no hay calificaciones
- HP Gearless Ball Mill Drive in Cement-Why Not! PDFDocumento15 páginasHP Gearless Ball Mill Drive in Cement-Why Not! PDFRajuAún no hay calificaciones
- Energies: Regenerative Intelligent Brake Control For Electric MotorcyclesDocumento16 páginasEnergies: Regenerative Intelligent Brake Control For Electric MotorcyclesJosé GonzálezAún no hay calificaciones
- G761 CDS6673 D Moog Trubleshooting ManualDocumento4 páginasG761 CDS6673 D Moog Trubleshooting ManualRamesh BabuAún no hay calificaciones
- Artificial Intelligence in Electric Machine DrivesDocumento22 páginasArtificial Intelligence in Electric Machine DrivesRaihan FaishalAún no hay calificaciones
- AmedaPlatinum Service ManualDocumento7 páginasAmedaPlatinum Service ManualPañares NeilAún no hay calificaciones
- Electric Drives IntroductionDocumento50 páginasElectric Drives IntroductionDevaraju ThangellamudiAún no hay calificaciones
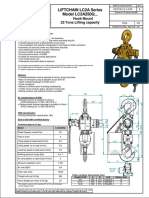
- Liftchain Lc2A Series Model LC2A250Q... : Hook Mount 25 Tons Lifting CapacityDocumento1 páginaLiftchain Lc2A Series Model LC2A250Q... : Hook Mount 25 Tons Lifting Capacitylucaslameirinhas1101Aún no hay calificaciones
- 1Documento4 páginas1Arnel Pamaos Lopiba MontañezAún no hay calificaciones
- SIPROTEC 4 7SJ62 Multifunction Protection RelayDocumento35 páginasSIPROTEC 4 7SJ62 Multifunction Protection RelayCesar SampaioAún no hay calificaciones
- 1.1. Electric Car With PVC PipesDocumento27 páginas1.1. Electric Car With PVC PipesSubbu VarmaAún no hay calificaciones
- Three-Phase Motors Procedure for Electrical and Thermal CharacteristicsDocumento85 páginasThree-Phase Motors Procedure for Electrical and Thermal CharacteristicsAlfredo Perazzo MorilloAún no hay calificaciones
- NOTICE - ATEX - Gaz - Anglais Rev.012012 - 02ENDocumento32 páginasNOTICE - ATEX - Gaz - Anglais Rev.012012 - 02ENGorch MarrokoAún no hay calificaciones
- DS STG-16!30!40 Actuator eDocumento2 páginasDS STG-16!30!40 Actuator eKristijan VlahAún no hay calificaciones
- Rwbii 60 - 480 IomDocumento56 páginasRwbii 60 - 480 Iomdfmolina100% (1)
- Article - TCA0222AE211GAA009 - DataPack - 9 Motor Marathon Don PabloDocumento6 páginasArticle - TCA0222AE211GAA009 - DataPack - 9 Motor Marathon Don Pablovictor perdomoAún no hay calificaciones
- Pratica 2Documento14 páginasPratica 2Eberton SantosAún no hay calificaciones
- HVS026) 1200A Rev00Documento84 páginasHVS026) 1200A Rev00Slobodan Savic100% (1)
- ENGR132 S2023 Assess M1-M2Documento4 páginasENGR132 S2023 Assess M1-M2Shehab AshrafAún no hay calificaciones
- Altivar® 21Documento52 páginasAltivar® 21Budy AndikaAún no hay calificaciones
- Automated Bottle Filling and Capping Machine Presentation by Beloved MaridzanyereDocumento17 páginasAutomated Bottle Filling and Capping Machine Presentation by Beloved MaridzanyereBeloved MaridzanyereAún no hay calificaciones
- VLT® Product Catalogue: Making Modern Living PossibleDocumento36 páginasVLT® Product Catalogue: Making Modern Living PossibleMarkyn FerreiraAún no hay calificaciones
- CCM Evolution Series E9000 GeDocumento171 páginasCCM Evolution Series E9000 GelarryAún no hay calificaciones